蔬菜移栽机分插机构结构参数优化及运动特性分析
2015-12-08 01:57万霖汪春车刚冯金龙张吉军
黑龙江八一农垦大学学报 2015年2期
万霖,汪春,车刚,冯金龙,张吉军
(黑龙江八一农垦大学工程学院,大庆 163319)
蔬菜移栽机分插机构结构参数优化及运动特性分析
万霖,汪春,车刚,冯金龙,张吉军
(黑龙江八一农垦大学工程学院,大庆 163319)
基于水稻插秧机的基础上改进的小型蔬菜移栽机,移栽的核心工作部件是采用曲柄摇杆的后插式分插机构,其性能决定移栽质量,通过理论分析,建立曲柄摇杆分插机构的运动模型,模拟了相对运动轨迹和绝对运动轨迹。运动VB软件获得运动轨迹,并进行参数优化,获得取苗角=13.2°,推苗角=68.08°,两角差值=55.50°。绝对运动轨迹高度达到300 mm,满足蔬菜移栽农艺要求,为蔬菜移栽设计提供理论依据。
蔬菜移栽机;分插机构;运动特性;轨迹
随着国民经济的发展、农村产业结构的调整、市场经济的确立、人民生活水平的不断提高,蔬菜生产迅猛发展,已成为中国农业及农村经济的支柱产业[1-2]。据有关数据统计显示,2009年蔬菜种植面积2072.11万hm2,其中设施蔬菜种植491.35万hm2。移栽是蔬菜生产过程中重要环节之一,具有对气候的补偿作用和使作物生育提早的综合效益,可以充分利用光热资源,其经济效益和社会效益均非常可观,要求其配套机械不断的改进,发展机械化栽植是设施农业发展的必然趋势[3-6]。
基于水稻插秧机的基础上改进的小型蔬菜移栽机移栽的核心工作部件是后插式分插机构,后插式分插机构是改进的蔬菜移栽机的核心工作部件,其性能的好坏决定移栽质量、工作可靠,其参数的选择既要满足运动轨迹,又要保证旱地栽植的行业标准,满足栽植臂部不产生运动干涉的要求[7]。通过模拟绝对运动轨迹优化较佳的设计参数,确定最优值[8-12]。
1 分插机构运动模型的建立
蔬菜移栽机的核心工作部件是后插式分插机构,即分插机构的夹持钵苗指向和插秧机的前进方向相反如1示意图。该机构采用是曲柄摇杆机构,其机构运动简图及位置分析如图2,曲柄摇杆式分插机构适用步行蔬菜移栽机,通过改变曲柄摇杆式分插
机构的摇杆铰链点相对曲柄转动中心位置,形成不同轨迹,改变连杆上P点位置和角度引起轨迹的变化规律,其等效于改变了摇杆铰链点D的相对位置。
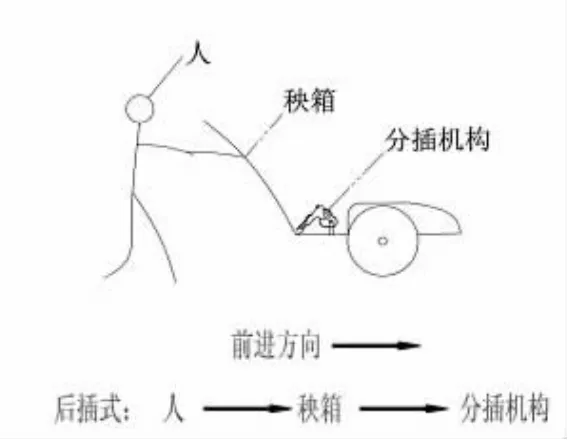
图1 移栽方式示意图Fig.1Diagram of transplanting methods
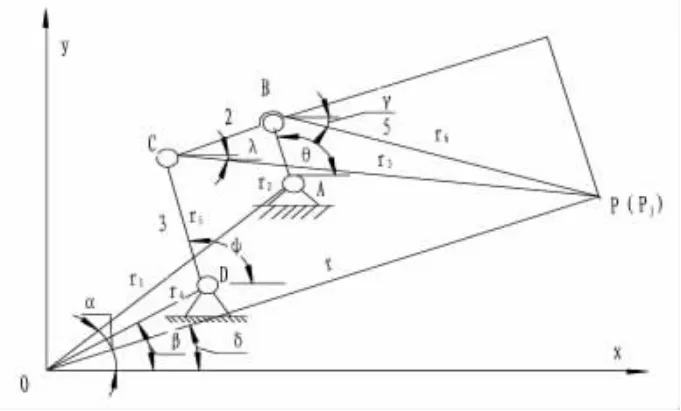
图2 曲柄连杆机构位置分析Fig.2Analysis of crank position
1.1 曲柄原动件的复数和矩阵数学模型建立
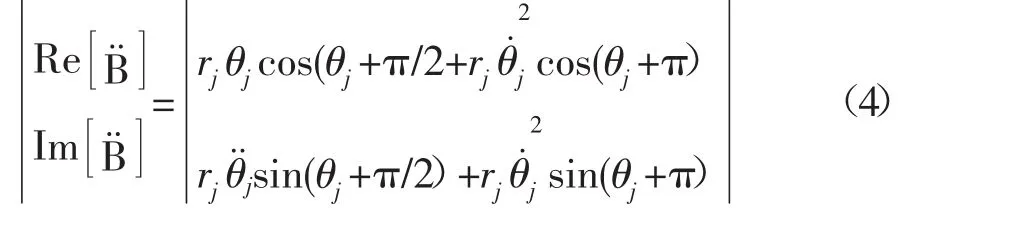
如图3所示,在复数坐标中,曲柄的复数和矩阵数学模型的建立AB复向量的模rj为常数、幅角θj为变量,通过转动副A与机架连接,转动副A的复向量的模ri为常量、幅角θi为常量,曲柄AB端点B位移、速度、加速度推导如下:

图3 曲柄复数坐标Fig.3Coordinates of crank complex
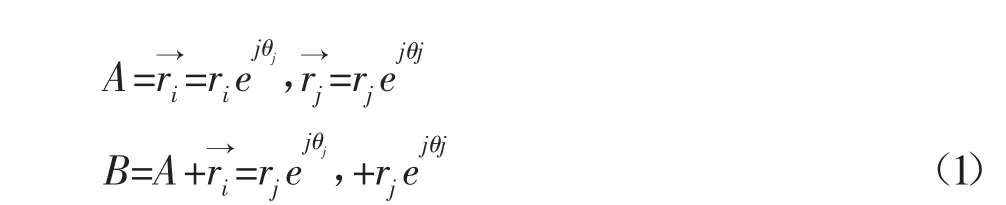
方程(1)对时间t求导得:

方程(2)对时间t求导得:

由(3)写出矩阵形式有
1.2 杆组的复数和矩阵数学模型的建立
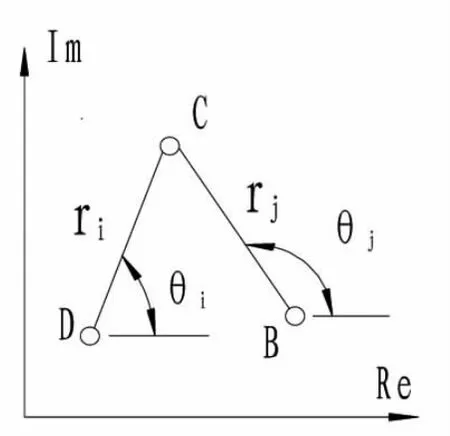
图4 杆组的复数坐标Fig.4Complex coordinates of bar group
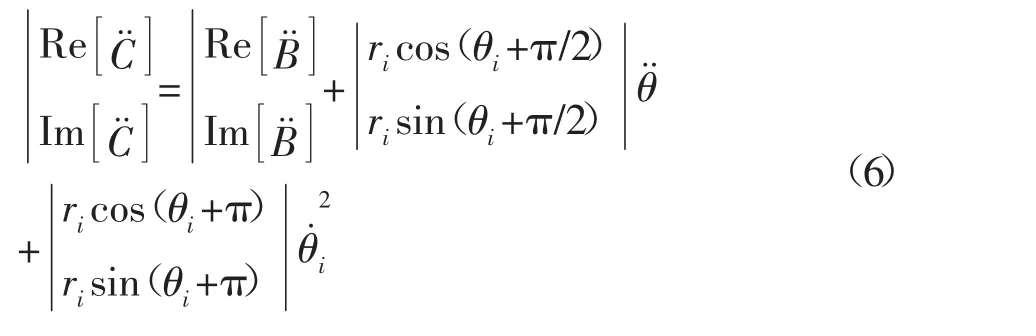
杆组的复数坐标系中,由三个转动副(B,C,D)和两个构件(ri,rj)组成,即为RRRⅡ级杆组。构件的幅角θi和θj是变量,C点的加速度推导如下:

方程(5)整理后对时间t求导,写成矩阵形式:
2 蔬菜移栽机运动轨迹分析
如图1所示,步行式移栽机属于后插式作业,核心工作部件——曲柄摇杆式分插机构来展开,取苗器固定在连杆(栽植臂)上,取苗器的运动轨迹为连杆运动曲线的一种特定形式。当曲柄按一定转速旋转时,摇杆摆动,固定在连杆上的取苗器按封闭曲线运动,完成取苗和移苗动作,不需要控制机构控制轨迹,结构简单,运动平稳,摩擦阻力小,但取苗器的行程受限制,行程过大每分钟移栽的次数不能提高,所以应用在步行移栽机,前进的速度慢,不会影响移栽质量。
分插机构运动轨迹指的是相对运动轨迹和绝对运动轨迹。相对运动轨迹是指移栽机在水平方向没
有位移时分插机构上的夹持部分尖点形成的运动轨迹;绝对运动轨迹指移栽机按照实际工作要求水平前进时分插机构上夹持部分尖点形成的轨迹。
2.1 构建轨迹设想
(1)考虑钵苗的高度的要求,从苗盘上取下钵苗至最低的距离,机构要有实现的可能;
(2)取苗器进入钵苗群处(叫入帘),相对取苗器尖点的轨迹走向要与钵苗轴向成锐角(一般5°~20°);
(3)取苗段的轨迹走向应尽量与苗帘平行,而分苗方向要垂直,减少切削阻力;
(4)取苗深度要满足钵苗的钵块高度,一般为35~50 mm;
(5)基本上与地面垂直向下运苗,接近垂直式分苗;
(6)取苗器进行下移返回,要求不碰到刚移栽的钵苗;
(7)回程间隙保证机器正常运转不碰到苗群。
2.2 相对运动轨迹(静轨迹)分析
相对运动轨迹根据分苗—运苗—移栽—回程各段的要求而定,作为设计机构的依据,并判定分苗、运苗、回程段的合理性如图5,这些轨迹最根本的原因是其运动时产生的非匀速传动运动,可以通过改变结构参数的方式获得“海豚形”曲线。
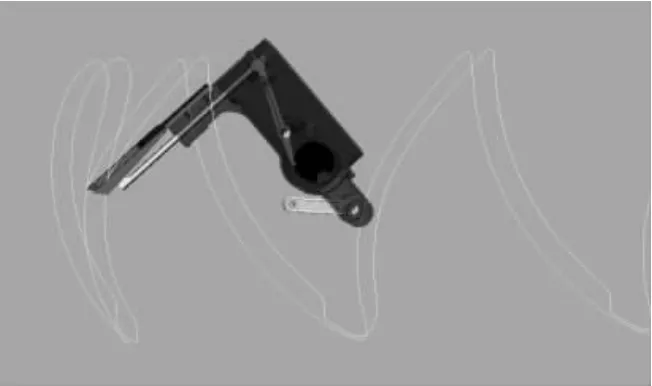
图5 相对运动轨迹和绝对运动轨迹Fig.5Simulation of relative motion path and absolute motion path
2.3 绝对运动轨迹(动轨迹)分析
为保证移栽质量必须对绝对运动轨迹进行分析,用于理论上检验移栽段和回程段轨迹是否能适应给定的株距范围,作为静轨迹评价和修改的依据如图。
绝对运动轨迹是机车前进速度形成的,即速度比:
令机车的前进速度:Vm;
取苗器尖点的绝对运动速度:V,其水平运动方向速度Vx和垂直运动方向速度Vy,对各个阶段运动加以分析:
(1)在取苗点前的某小段轨迹要求λ≥1。工作时苗箱与机车的行走速度一致,如果出现λ<1,则会出现取不上钵苗的情况。
(2)送苗过程,对这一阶段栽植臂的轨迹无特殊要求。
(3)回转过程,要求λ<0且|λ|>1,目的是避免推倒钵苗。
(4)避让过程,要求λ<0且|λ|≥1。一般取λ=-1,尖点的水平绝对速度为0,只有垂直向上的运动,高度由钵苗的高度决定,以不伤苗为准。可以避免随机车向前运动时把已移栽好的钵苗碰伤。
(5)为了避免伤苗,在回转过程和避让过程段中尖点的绝对水平分速度Vx一直小于机车的前进速度Vm,只有当Vx>Vm时才能赶上秧门并进行下一周期的取苗、移栽。
从分插机构栽植臂的绝对运动轨迹可以看出,各阶段其运动方向和大小各不相同,做变速运动,才能获得满足农艺要求的移栽轨迹。
3 仿真分析
利用VB建立可视化界面,在计算机调整设计参数,确定可行方案,再经过必要的分析,进一步评定优劣,选取合理方案。
3.1 绝对运动模拟
绝对运动模拟模块的功能是模拟栽植机在田间的实际工作情况。在水平前进速度的作用下栽植机构形成绝对运动轨迹,从绝对运动轨迹上可以分析取苗穴口的大小、投苗位置等,如图6所示。
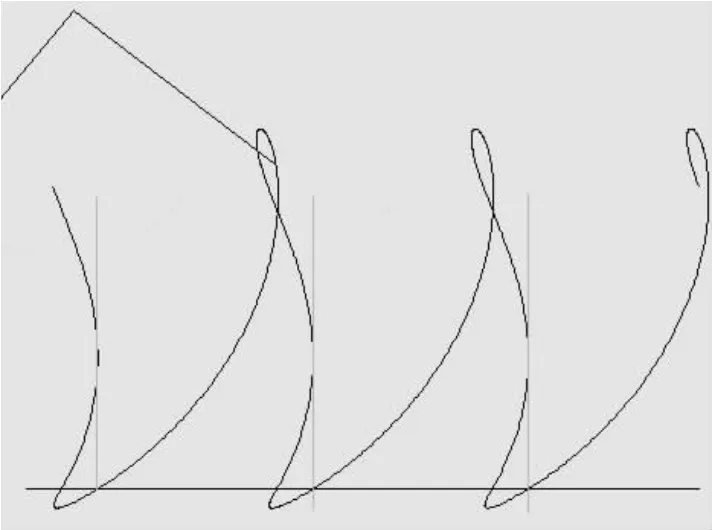
图6 优化前的绝对运动轨迹Fig.6Path of absolute motion
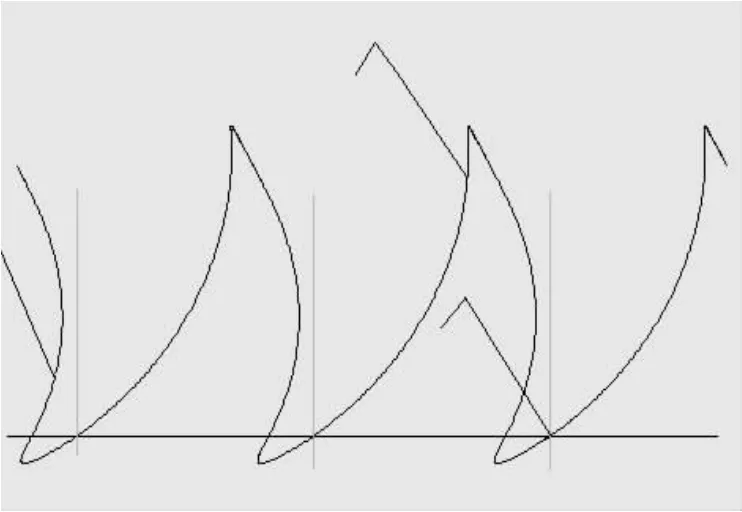
图7 优化后的绝对运动轨迹Fig.7Path of optimized absolute motion
在改变株距时,应用该组参数设计的分插机构在实际的工作过程中会发生压苗现象,所以要修改参数。导致压苗现象的原因是取苗器尖点静轨迹过于前倾,所以要减小初始角度。经过优化后得到如图7所示的绝对运动轨迹。可以看出,经过优化后的轨迹不会产生压苗现象。同时,计算得取苗角=13.2°,推苗角=68.08°,两角差值=55.50°。绝对运动轨迹高度达到300 mm,可以同时满足蔬菜钵苗移栽要求。
在以上辅助设计优化过程中,要始终注意取苗角、推苗角的大小。以保证移栽后钵苗的直立度。
4 结论与讨论
(1)平面连杆机构运动分析与设计问题,采用复矢量法分析法,建立矩阵方程,为采用计算机设计程序提供依据,使得原本复杂的计算变得容易。
(2)对分插机构上栽植臂尖点的相对运动轨迹和绝对运动轨迹进行分析,分析了海豚形运动轨迹的生成过程。
(3)利用VB软件,分析分插机构的运动协调。分插机构在工作条件下,取苗位置合理。理论推苗角为70°,基本吻合,推苗满足理论设计要求。推苗时间为0.019 S。推苗结束后,钵苗在重力作用下,钵苗与水平线之间的夹角在80°~90°之间变化,可以保证机械插秧时秧苗直立的农艺要求。
(4)理论分析和虚拟技术相结合,已满足要求,但实际生产过程中诸多因素的影响,如蔬菜钵苗大小、蔬菜根部结构、切割力的大小需要进一步验证。
[1]中国农业科学院蔬菜花卉研究所.中国蔬菜栽培学[M].北京:中国农业出版社,2010.
[2]李作义,李鑫,柴宏艳,等.试论农业机械化与发展现代农业[J].中国农机化,2008(3):8-14.
[3]顾元龙,熊助功,王统正.实用蔬菜栽培技术[M].上海:上海科学技术出版社,1992.
[4]葛晓光.蔬菜育苗大全[M].北京:中国农业出版社,1995.
[5]李曙轩.蔬菜栽培学总论[M].2版.北京:中国农业出版社,2002.
[6]方宪法.我国旱作移栽机械技术现状及发展趋势[J].农业机械,2010(1):35-36.
[7]陈建能,赵匀.水稻插秧机分插机构的研究进展[J].农业工程学报,2003,19(2):23-27.
[8]尹建军.水稻插秧机差速分插机构的计算辅助分析与设计[D].杭州:浙江大学,1999.
[9]孙桓,陈作模.机械原理[M].北京:高等教育出版社,2005.
[10]曲秀全,陈照波,焦映厚.RPR-RPP六杆机构的MATLAB动力学仿真[J].机械传动,2003,27(6):13-16.
[11]万霖,汪春,车刚,等.小型蔬菜移栽机的改进设计与试验[J].农业工程学报,2011,27(6):117-122.
[12]张燕梁,肖苡任,万霖,等.2BZJ-4型精量供水播种机的研制[J].黑龙江八一农垦大学学报,2014,26(2):29-32.
Study on Structural Parameter Optimization and Motion Characteristics Analysis of Transplanting Mechanism
Wan Lin,Wang Chun,Che Gang,Feng Jinlong,Zhang Jijun
(College of Engineering,Heilongjiang Bayi Agricultural University,Daqing 163319)
To improve small vegetable transplanter on the basic of rice transplanter,the core component of transplanting used crank rocker of plug transplanting mechanism,and the performance decided transplanting quality.Based on the theory analysis,the paper built motion model of crank and rocker transplanting mechanism and simulated the relative motion path and absolute motion path. The software VB got trajectory,optimized parameter and obtained seedling angle 13.2°,and pushed seedlings angle 68.08°and corners difference 55.50°.The height of absolute trajectory was 300 mm to meet the agricultural requirement of vegetable transplanting and provide the theory basis for vegetable transplanting design.
vegetable transplanter;transplanting mechanism;motion characteristics;trajectory
266.6
A
1002-2090(2015)02-0083-04
10.3969/j.issn.1002-2090.2015.02.019
2013-12-18
黑龙江省教育厅科学技术研究项目(12521366)。
万霖(1971-),女,教授,硕士研究生导师,现主要从事农业机械设计及理论方面的教学与研究工作。
猜你喜欢
山东理工大学学报(自然科学版)(2022年5期)2022-08-18
南方农机(2021年3期)2021-02-07
林业科技(2020年3期)2021-01-21
江西农业大学学报(2020年6期)2021-01-08
湖北农机化(2020年17期)2020-11-02
高师理科学刊(2020年6期)2020-08-16
数学物理学报(2020年3期)2020-07-27
机电工程技术(2020年2期)2020-03-26
农机化研究(2019年7期)2019-05-24
农业工程学报(2018年9期)2018-06-01