
基于颜色特征的果树图像中成熟蜜桔的分割
2015-12-08 13:05唐英杰陆玲
电脑知识与技术 2015年25期
唐英杰++陆玲
摘要:根据成熟蜜桔在果树中的颜色特征,首先去除果树中的绿色叶子,然后根据蜜桔的色调特点突出蜜桔, 再进行滤波处理消除噪声,最后提取背景形状特征,对误判的区域进行修正。通过大量图片的结果对比,基本上从果树中能分割出蜜桔区域。
关键词:蜜桔;图像分割;颜色特征
中图分类号: TP311 文献标识码:A 文章编号:1009-3044(2015)25-0127-03
The Mature Orange Segmentation in Fruit trees Image Based on the Color Characteristics
TANG Yin-Jie, LU ling
(School of Information Engineering, East China Institute of Technology, Nanchang 330013,China)
Abstract: According to the characteristics for mature oranges in fruit trees, first we remove the green leaves in the fruit trees, and then prominent the orange according to its color characteristics and filtering treatment to remove the noise, finally extract the shape, area of miscarriage of justice.We passed a lot of pictures of the results, the orange region can be separated from the fruit tree.basically.
Key words: orange;image segmentation;color characteristics
1 绪论
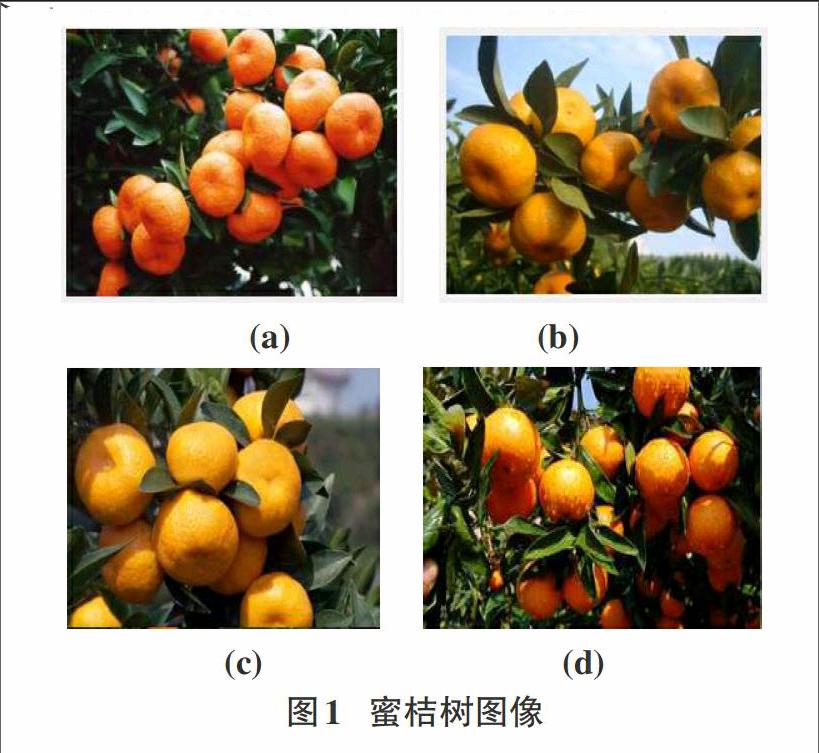
在社会经济的飞速发展,社会步入工业发展阶段的背景下,计算机发展和农牧业应用需求亦飞速增长,各种采摘机器人的研究具有重大的现实意义。而采摘机器人的最基本的一个需求就是需要识别采摘对象的位置。本文以果树中的南丰蜜桔为例,提出了在自然环境下基于颜色特征的果树中蜜桔的识别方法。
在果树中果实识别中,有许多研究者针对不的果实提出了不同的方法。俞晓磊等[1] 将光谱技术与导航技术有机结合, 将果实、树叶、树枝的反射光谱作为一个重要的导航参数,利用其差异进行导航, 可以快速区分果实、树叶和树枝,还可以有效消除外界环境的干扰,但成本高。司永胜等[2] 提出了利用归一化的红绿色差分割苹果的方法。通过建立基于面积特征与极线几何相结合的匹配策略实现双目视觉下的果实定位,采用随机圆环法,可以较准确地提取果实的圆心、半径。黄敏等[3]采用模板匹配方法,实现对果园苹果的果实识别。李印清等[4]以番茄作为研究对象,提出基于区域特征的果实识别技术,识别过程包括灰度变换、区域边缘锐化、区域分割、细化处理等步骤,冯娟等[5]研究了融合多源图像信息的果实识别方法。优选了H分量图与幅度图像作为待融合的源图像;采用加权平均策略实现图像的像素级融合;设计了一种基于直方图的首阈检测法和逐层分割图像的方法以解决重叠果实的分离问题。
以上方法没有对蜜桔果实的处理,我们根据树叶与蜜桔的颜色特征,将蜜桔从果树中分割出来。
2 处理果树中的树叶
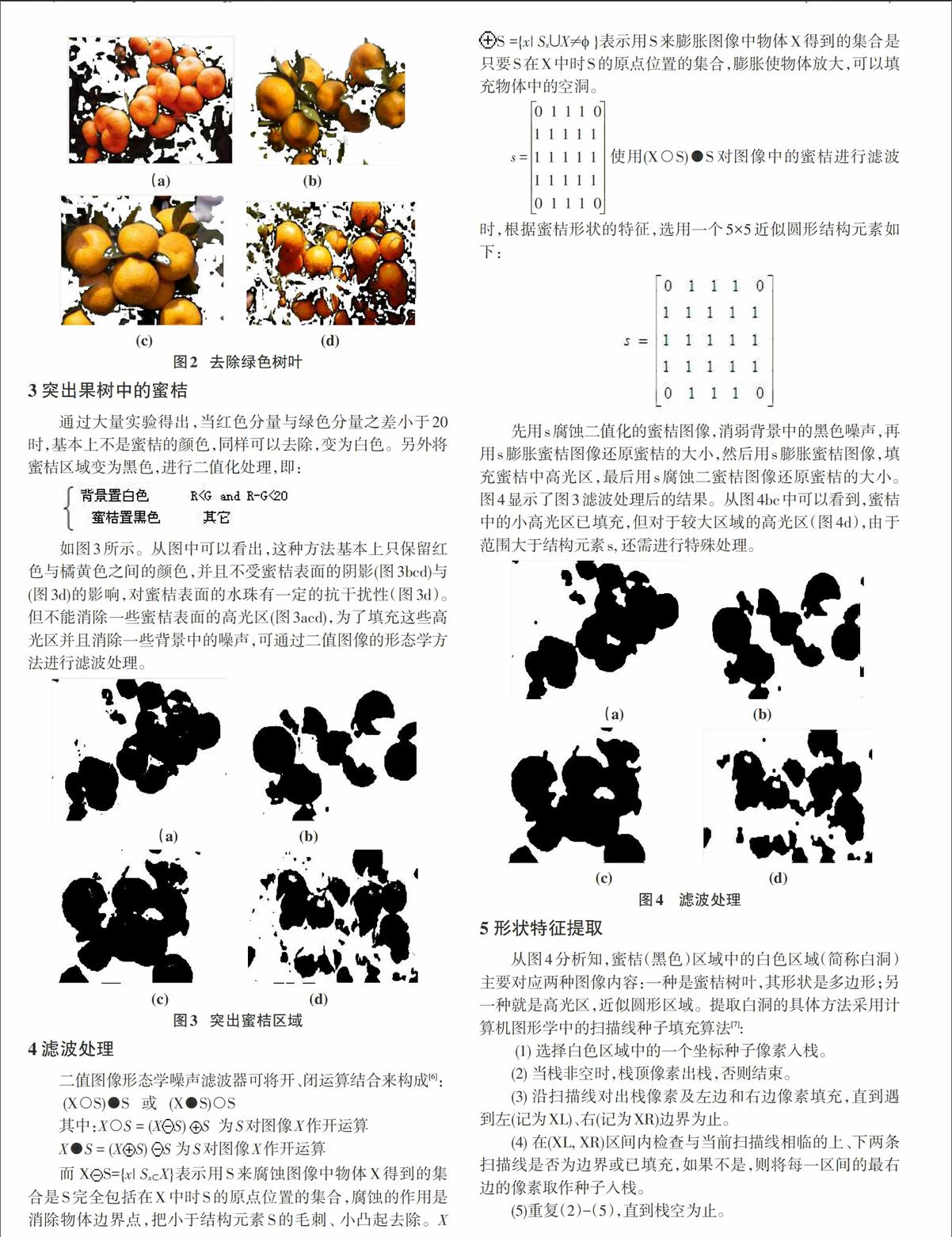
根据蜜桔树图像的特征,图像中的背景大部分是蜜桔树叶,为了更突出成熟的橙子,可先去除去绿色。去绿色的方法一般是当像素的绿色分量大于红色分量,就将该像素置为白色。即:
图1中四幅图像去绿后得图2。从图2中可以看出,这种方法还不能去掉偏黄的叶子(图2bc)、暗色偏红的叶子(图2acd)以及一些亮色区域(图2c)。必须进一步再处理。
3 突出果树中的蜜桔
通过大量实验得出,当红色分量与绿色分量之差小于20时,基本上不是蜜桔的颜色,同样可以去除,变为白色。另外将蜜桔区域变为黑色,进行二值化处理,即:
如图3所示。从图中可以看出,这种方法基本上只保留红色与橘黄色之间的颜色,并且不受蜜桔表面的阴影(图3bcd)与 (图3d)的影响,对蜜桔表面的水珠有一定的抗干扰性(图3d)。但不能消除一些蜜桔表面的高光区(图3acd),为了填充这些高光区并且消除一些背景中的噪声,可通过二值图像的形态学方法进行滤波处理。
4 滤波处理
二值图像形态学噪声滤波器可将开、闭运算结合来构成[6]:
(d)
图4 滤波处理
5 形状特征提取
从图4分析知,蜜桔(黑色)区域中的白色区域(简称白洞)主要对应两种图像内容:一种是蜜桔树叶,其形状是多边形;另一种就是高光区,近似圆形区域。提取白洞的具体方法采用计算机图形学中的扫描线种子填充算法[7]:
(1) 选择白色区域中的一个坐标种子像素入栈。
(2) 当栈非空时,栈顶像素出栈,否则结束。
(3) 沿扫描线对出栈像素及左边和右边像素填充,直到遇到左(记为XL)、右(记为XR)边界为止。
(4) 在(XL, XR)区间内检查与当前扫描线相临的上、下两条扫描线是否为边界或已填充,如果不是,则将每一区间的最右边的像素取作种子入栈。
(5)重复(2)-(5),直到栈空为止。
为了区别树叶白洞与高光区白洞,对上述填充算法进行改进,在填充的过程计算白洞的面积、最小外接矩形、边界长度(周长):
(1) 选择白色区域中的一个坐标种子像素入栈。
(2) 当栈非空时,栈顶像素出栈,否则结束。
(3) 沿扫描线对出栈像素及左边和右边像素填充,并确定像素坐标是否是目前x、y的最大xmax、ymax或最小值xmin、ymin,如果是,记录下来;然后计数区域面积,直到遇到左(记为XL,计数边界个数)、右(记为XR,计数边界个数)边界为止。
(4) 在(XL, XR)区间内检查与当前扫描线相邻的上、下两条扫描线:
如果是边界或已填充,计数边界个数;
如果不是,将每一区间的最右边的像素取作种子入栈;
(5)重复(2)-(5),直到栈空为止。
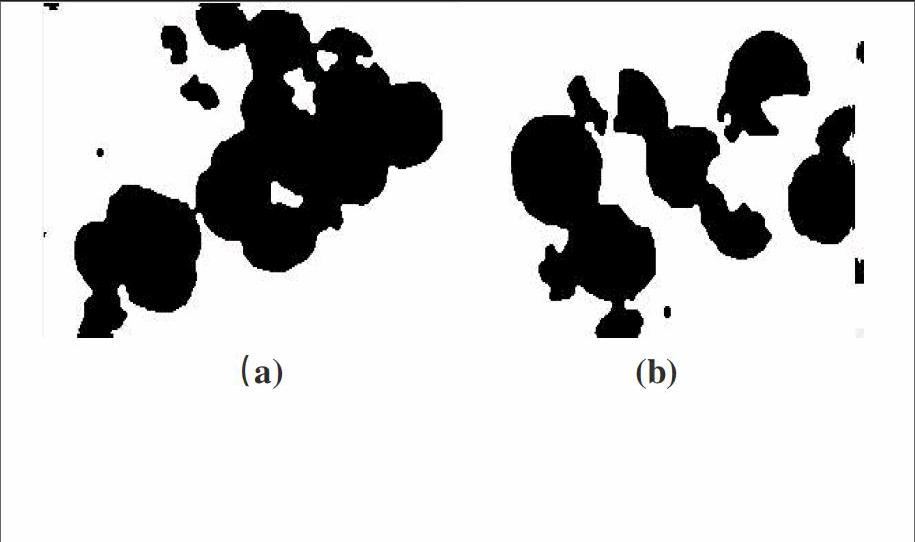
经过分析与实验,得出高光区的矩形度[6]:
R=区域面积/((xmax-xmin)×(ymax-ymin))>0.9
且圆形度[6]:
C-4×区域面积/(区域周长×区域周长)>0.6
对于满足上述两个条件的白洞,可认为是蜜桔高光区,需用黑色填充,如图5所示,图5d中的两个高光区进行了填充。
6 结束语
本文提出对蜜桔割的方法过程是:去除果树中的绿色突出蜜桔进行二值化处理,进行滤波处理消除图像中的一些噪声,对判断的结果进行修正。该方法计算效率高,分割比较准确,经过大量的实验,效果较好,有一定的实用价值。
参考文献:
[1] 俞晓磊,赵志敏.光谱导航技术在果树果实定位中的应用[J].光谱学与光谱分析,2010,30(3):770-773.
[2] 司永胜,乔军,刘刚,高瑞,何蓓.苹果采摘机器人果实识别与定位方法[J].农业机械学报,2010,41(9):148-153 .
[3] 黄敏. 基于模板匹配的苹果果实识别, 计算机应用与软件[J].2010,27(10):240-242.
[4] 李印清,郑小东, 王晓洁. 基于区域特征的果实识别技术[J].河南科学,2010,26(3):339-342
[5] 冯娟,曾立华,刘刚,司永胜.融合多源图像信息的果实识别方法[J].农业机械学报,2014,45(2):73-80.
[6] 陆玲,李金萍.Visual C++数字图像处理[M].中国电力出版社,2014.
[7] 陆玲,桂颖,李丽华.计算机图形学[M].电子工业出版社,2012.
猜你喜欢
江西农业(2021年14期)2021-12-06
科学导报(2021年63期)2021-09-29
现代园艺(2017年23期)2018-01-18
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年24期)2016-11-14
电脑知识与技术(2016年24期)2016-11-14
中国品牌(2016年4期)2016-08-19
中国果菜(2013年2期)2013-01-23
中国果业信息(2012年11期)2012-08-15
