
Whiffletree结构中的柔节设计
2015-12-07 06:56王克军董吉洪宣明张缓缓张立浩孙丽军
长春理工大学学报(自然科学版) 2015年4期
王克军,董吉洪,宣明,张缓缓,张立浩,孙丽军
(1.中国科学院长春光学精密机械与物理研究所,长春 130033;2.中国科学院大学,北京 100049)
柔节是一种通过一体化设计和加工的、利用材料的弹性变形来实现预期功能的具有特殊形状的特殊运动副[1]。航天遥感器大口径反射镜面形精度和支撑稳定性要求高,其支撑结构也广泛使用柔节,主要用来模拟球铰,实现对反射镜的静定支撑、释放温度载荷变化时由于反射镜材料和支撑材料热特性不一致带来的热应力以及装配应力等[2,3]。
本文针对某空间遥感器的大口径反射镜的复合支撑的功能实现,设计了一种柔性结构。该复合支撑结构包括三组背部whiffletree结构和三组周边A框加切向拉杆结构。本文设计了whiffletree结构中的一个柔性环节,将支撑结构的功能和指标进行分配,明确柔节的功能和指标大小。采用传统的材料力学理论对柔节开展初始设计,然后采用有限元的手段对柔节的关键细节结构的尺寸进行优选,获得满足功能需求的柔节。最后,根据柔节的工作状态,规划了检测试验来验证柔节的性能,在设计载荷的作用下,柔节在轴向的变形量为0.002mm,小于设计需求的最大值0.003mm;柔节在径向的变形量为0.113mm,远大于设计需求的最小值0.022mm。
基于whiffletree中柔性环节的功能需求,本文提出了一种空心圆柱带切槽的柔节,满足背部支撑的定位功能、满足背部支撑与周边支撑的解耦需求,满足热应力的释放需求,结构简单、并且实用。
1 原理分析
复合支撑是大口径反射镜支撑的一种方式,包括周边支撑和背部支撑,两者共同作用来对反射镜实现静定支撑和超静定支撑,进行空间定位。背部支撑和周边支撑采用特殊结构形式保证不引入过约束的前提下增加支撑点,提高镜面面形。复合支撑通过结构中的柔性环节释放在温度载荷变化时由于支撑和镜体的热特性不一致带来的热应力。
由于该反射镜在工作中要实现方位观测和俯仰观测,在光轴水平时的面形精度、刚体位移和倾角由周边支撑保证,光轴竖直时的面形精度、刚体位移和倾角由背部支撑来保证,中间位置时由两者共同保证,为保证各个工作状态的面形精度等指标,必须使周边支撑和背部支撑互不影响,因此要将周边支撑和背部支撑功能解耦[4]。
1.1 复合支撑原理分析
复合支撑结构要约束反射镜的六个空间自由度[5,6],如图1所示。
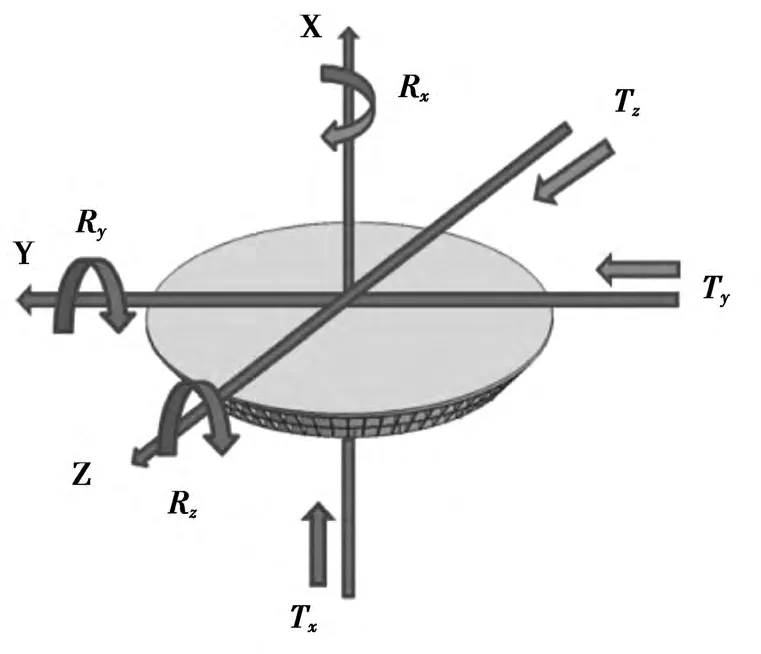
图1 反射镜六个空间自由度
周边支撑约束三个自由度:Rx,Ty,Tz;背部支撑约束剩余的三个自由度:Tx,Ry,Rz。
周边支撑采用三组A框和切向拉杆的支撑结构形式,增加支撑点数,约束三个自由度,释放热应力。原理如图2所示。
周边支撑可简化为平面机构,去掉虚约束,采用平面机构自由度计算公式计算其自由度:z=3×(n-1)-2pL=3×(11-1)-2×15=0,恰好全约束3个平面自由度:Rx,Ty,Tz。

图2 A框+切向拉杆结构原理图
由于镜体与周边支撑结构的材料热特性不一致时,温度变化会带来沿反射镜径向热应力,通过周边支撑中径向的铰链来消除或减弱以满足使用需求;背部支撑沿光轴方向的热变形会受到周边支撑约束产生热应力,通过周边支撑中光轴方向的铰链来消除和减弱以满足使用需求。工程中的实际结构是采用柔节来代替铰链。
背部支撑采用三组whiffletree结构增加支撑点数,约束反射镜剩余的三个空间自由度,释放热应力。每组whiffletree将支撑点由一点变为两点,原理如图3所示。

图3 whiffletree结构原理图
单个柔节限制一个移动自由度,两个柔节限制两个移动自由度,等价于一个移动自由度和一个转动自由度,转轴将转动自由度释放,则每组whiffletree约束一个移动自由度,三组whiffletree在镜体背部成120°均布在一个圆上,共约束反射镜三个移动自由度,等价于一个移动自由度和连个转动自由度:Tx,Ry,Rz。
为保证反射镜在多个工作状态下的面形精度、刚体位移和倾角,必须将周边支撑和背部支撑结构解耦,互不干涉,各司其职。解耦的程度是通过柔性环节的柔性来保证的。
光轴水平时,去掉背部支撑的反射镜组件的面形值、刚体位移和倾角近似等于整个反射镜组件的面形值、刚体位移和倾角,背部支撑与周边支撑完全解耦。这个功能由whiffletree结构中的柔节来实现。
光轴竖直时,去掉周边支撑的反射镜组件的面形值、刚体位移和倾角近似等于整个反射镜组件的面形值、刚体位移和倾角,周边支撑与背部支撑完全解耦。这个功能由周边支撑上光轴方向的柔槽来实现。
1.2 柔节功能分析
本文主要研究背部whiffletree中的柔节,柔节的具体位置如图4所示,针对whiffletree组件的原理分析,提取柔节功能:柔节的轴向刚度需求高,在所承受载荷的作用下产生的轴向变形量要小于设计指标,起到定位作用;在垂直柔节轴向的方向刚度需求低,在不引起反射镜面形变化较大的切向载荷下,产生的挠度要大于设计指标,起到释放自由度的作用。即柔节决定了背部支撑的定位能力、背部支撑与周边支撑的解耦能力和背部支撑引入的热应力。

图4 反射镜组件
2 柔节结构设计
2.1 柔节设计指标
通过原理分析,明确柔节的功能,对反射镜组件进行指标分解,确定柔节的设计指标。
反射镜背部共有三组whiffletree,六根柔节,柔节在承受如图5所示轴向载荷F时,即G/6,G为反射镜的总重量,F约为43.6N,柔节在其轴向的变形量要小于0.003mm,才能满足其轴向定位功能。

图5 柔节轴向受力
当反射镜组件处于光轴水平的工作状态时,背部支撑与周边支撑的自由度解耦由柔节来完成。镜体承受柔节轴向力F的十分之一的切向力时,对镜面面形的影响可以忽略。指标规定光轴水平时镜体的刚体位移要小于0.01mm,在这个工作状态这项指标由周边支撑来保证。背部支撑要与周边支撑解耦,背部支撑不对镜体起支撑作用,不能影响镜体面形精度、刚体位移和倾角,解耦功能由柔节来完成。柔节需要在承受图6所示F/10的切向力时,柔节与镜体接触端的刚体位移大于0.01mm。

图6 柔节切向受力
反射镜组件承受温度载荷时,镜体和背部支撑及镜室的热特性不一致产生热应力,该热应力由柔节来消除或者缓解。当组件整体温升高5℃时,在6个柔节支撑点位置处由于反射镜与背部支撑和镜室的线膨胀系数不一致带来的位移差:

其中:α镜室表示镜室的热膨胀系数,α镜表示镜的热膨胀系数,R支撑点表示六个柔节所在分布圆的半径。
柔节在切向力F/10,即4.36N的作用下,端部的挠度应大于0.022mm,可消除热应力的影响。
2.2 柔节设计
根据柔节的设计指标、功能需求和反射镜组件中柔节所处位置的空间大小设计柔节[7]。初始设计的柔节结构形式如图7所示。柔节为空心圆柱带四个切槽的柔节,四个切槽分为两组,垂直交错布置。

图7 柔节三维模型
根据柔节的定位需求,其在轴向载荷43.6N作用下,柔节的轴向变形量要小于0.003mm。需满足以下公式:

其中,F表示柔节所受轴向载荷,值为43.6N;L表示柔节的有效长度,值为0.043m;E表示是柔节材料的弹性模量,值为1.09e11Pa;A表示柔节轴向的有效截面积,A>5.73e-6m2
柔节的有效截面积大于5.73e-6m2即可,在柔节中将最小截面积设计为2×0.002m×0.002m=8e-6m2,因此轴向变形量指标必定小于0.003mm。设计柔节初始参数如图8所示。
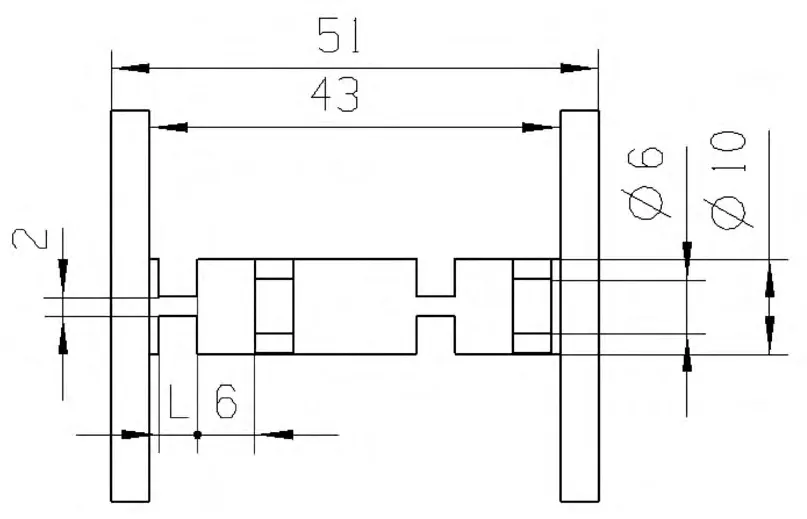
图8 柔节尺寸参数
图8中的柔节参数L决定柔节垂直轴向的方向的刚度,当在轴端施加Fjx=F/10=4.36N的径向载荷时,轴端的挠度应大于0.022mm,加载方式如图9所示,柔节变形趋势如图10所示。满足下述公式:

其中,Fjx表示柔节与镜体接触的端部承受的切向载荷,4.36N;L表示柔性切槽的宽度,柔节上四段切槽宽度均为L;E表示柔节所用材料的弹性模量,1.09E11Pa;I表示柔节上切槽连接处的截面对Y轴的惯性矩;

M表示Fjx在柔节上的固定端一侧第二个切槽上右边缘产生的弯矩;

柔节上的切槽宽度要大于0.3mm,两组切槽分别决定柔节在图9施加载荷方向(0°)的刚度和绕轴向旋转90°时的刚度,柔节在0°和90°切槽的布置严格左右对称,刚度相同。柔节在0°和90°之间的刚度等于柔节0°方向和90°方向刚度的矢量合成,数值大小接近两者大小。

图9 切向载荷加载

图10 柔节变形趋势
根据理论设计,柔节满足定位、解耦和热应力释放功能,但柔节在组件中其功能并不完美。将设计完成的柔节做为初始设计装配到反射镜组件中,建立反射镜组件的有限元模型,以镜面面形为目标函数,以切槽宽度L为变量(L初始值取0.3mm)进行优化,最终确定L尺寸为4mm,柔节在组件中具备定位、解耦和热应力释放功能。
3 工程分析
在进行零件的加工生产之前,采用有限元分析的手段[8],验证柔节的轴向的刚度和垂直轴向的方向的刚度。
考虑柔节的工作状态,约束柔节的一端,在另一端施加F=43.6N的轴向载荷,计算施加载荷端面产生的位移量为0.018mm,小于0.003mm,满足设计需求。边界条件及分析结果如图11所示。
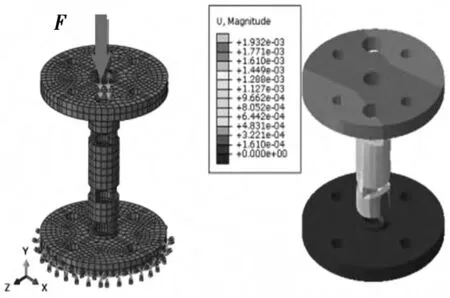
图11 柔节轴向刚度分析
为验证柔节在径向的刚度,约束柔节一端,在另一端施加切向力Fjx=4.36N,计算柔节端部的挠度为0.120mm,远大于0.022mm,满足设计需求。边界条件及分析结果如图12所示。

图12 柔节径向刚度分析
4 试验验证
试验测试是结构设计过程中的重要组成部分,可以真实的验证结构是否满足功能需求。在柔节加工完成之后,针对柔节的性能指标和工作状态,开展相应的测试试验。
测试设备包括加载设备和位移测试设备。加载设备是GNX-SX数显式推拉力计,其加载精度是0.01N,可实现试验载荷的精确加载;位移测试设备是机械式千分表,其测量精度是1μm,满足测试精度需求。
根据柔节的功能和实际工作状态,规划轴向刚度测试方法如图13所示,测试环境如图14所示。

图13 轴向刚度测试方法

图14 轴向刚度测试环境
沿光轴方向施加43.6N的载荷,千分表测得柔节沿光轴方向的变形量为0.002mm。
规划柔节径向刚度测试方法如图15所示,测试环境如图16所示。

图15 径向刚度测试方法

图16 径向刚度测试环境
沿垂直光轴方向施加4.36N的切向载荷,千分表测得柔节沿载荷方向的变形量为0.113mm。

表1 柔节设计、仿真与实验结果
由表1中的结果对比,试验数据与仿真数据基本一致,轴向变形量的仿真误差为10%,径向变形量的仿真误差为6.2%。组件仿真表明柔节在组件中满足对反射镜的定位功能、满足背部支撑与周边支撑的解耦功能、满足释放热应力的功能。而对柔节的仿真结果和试验结果偏差很小,可以推断柔节装配到组件中进行测试试验仍能满足定位、解耦和释放热应力的功能。这项组件级试验将在反射镜面形加工到λ/50时开展。
5 结论
本论文针对空间遥感器大口径反射镜的高精度、高稳定性的功能需求,对反射镜采用了定位、解耦、释放热应力性能优良的复合支撑结构。为保证背部支撑的定位、背部支撑与周边支撑的解耦、背部支撑的热应力释放能力,采用传统力学经验公式和有限元相结合的方式设计了一种空心圆柱带垂直布局切槽的柔节。最后,通过有限元仿真和试验测试确定了柔节的轴向刚度和径向刚度,在轴向载荷的作用下,柔节的轴向变形量为0.002mm,满足对反射镜的定位需求;在切向载荷的作用下,柔节沿垂直轴向方向的位移变化量为0.113mm,满足背部支撑和周边支撑解耦需求,满足释放热应力的需求。
[1]赵山杉,毕树生,宗光华,等.基于曲线柔性单元的新型大变形柔性铰链[J].机械工程学报,2009,45(4):8-12.
[2]陈贵敏,韩琦.深切口椭圆柔性铰链[J].光学精密工程,2009,17(3):570-575.
[3]辛洪兵,郑伟志,赵罘.弹性铰链研究[J].光学精密工程,2003,11(1):89-93.
[4]范磊.2m口径地基望远镜SiC主镜轻量化设计及支撑技术研究[D].北京:中国科学院大学,2013.
[5]邵亮,吴小霞,陈宝刚,等.SiC轻量化主镜的被动支撑系统[J].光学精密工程,2015,23(5):1381-1386.
[6]范磊,张景旭,邵亮,等.采用液压Whiffle-tree的大口径主镜轴向支撑[J].红外与激光工程,2013,42(8):2126-2131.
[7]赵宏伟,吴博达,曹殿波,等.直角柔性铰链的力学特性[J].纳米技术与精密工程,2007,5(2):144-147.
[8]王克军,董吉洪,李威,等.空间遥感器整机有限元分析[J]光机电信息,2010,27(12):81-87.
猜你喜欢
新能源科技(2022年9期)2022-11-20
摄影之友(2020年12期)2020-12-23
环境技术(2020年1期)2020-03-06
电脑爱好者(2018年17期)2018-11-05
山东工业技术(2018年3期)2018-01-19
制造技术与机床(2017年7期)2018-01-19
浙江大学学报(工学版)(2016年11期)2016-06-05
中国光学(2015年1期)2015-06-06
遥测遥控(2015年2期)2015-04-23
汽车与新动力(2013年3期)2013-03-11
