
带侧窗动能杀伤器直接力姿态控制
2015-12-05 05:11:14韩英宏雷延花陈万春严佳民廖选平
航天控制 2015年4期
韩英宏 雷延花 梁 卓 陈万春 严佳民 廖选平
1.中国运载火箭技术研究院,北京100076
2. 北京航空航天大学,北京100191
目前,典型的远程高空反TBM 导弹一般采用红外寻的末制导[1-2],而此类防空导弹以很高的速度飞行,气动加热严重,如果将导引头探测窗口直接安装在头部,气动光学效应将导致红外导引头无法正常工作。为了减小气动加热的影响,需要将导引头探测窗口安装在导弹的侧面,这样就会导致视线不对称,需要协调导弹姿态和轨迹的控制,对控制系统的设计引入新的课题:侧窗探测条件下的制导控制技术[3]。本文以带侧窗的动能杀伤器(KKV)为研究对象,设计了满足要求的直接力姿态控制方案,为杀伤器精确制导提供了有利条件。
1 KKV 模型
1.1 带侧窗的导引头模型
KKV 导引头探测窗口安装在其侧面,是经过导弹头锥其中一条母线的平面,导引头通过侧窗去发现目标,为便于描述,首先定义侧窗坐标系如图1 所示。
图1 侧窗坐标系示意图
侧窗坐标系原点oc取在导引头的回转中心,位于弹体轴上;ocxc轴在弹体纵对称平面内,平行于侧窗表面,指向弹体头部为正;ocyc在弹体纵对称平面内,垂直于ocxc轴,指向上为正;oczc垂直于纵对称平面ocxcyczc,方向按右手定则确定。
由定义可知,弹体系与侧窗系均与弹体固连,为动坐标系,且2 者的方位只需用一个角度Δ(该角度值为KKV 的半头锥角,本文取为15°)即可确定,ocxc在o1x1下方Δ 为正值。假设目标在侧窗系中的坐标为,则其在弹体系中的投影为:
对于视场的约束,应该体现在侧窗系下的视线角。本文的视线角约束为:qβc∈(-5°,5°),qεc∈(25°,75°),其中qβc和qεc分别为侧窗系下的视线方位角与视线高低角,计算公式如下:
1.2 直接力姿控发动机模型
本文研究的KKV 有6个姿控发动机安装在拦截器的尾部,其布局如图2 所示。
控制俯仰运动时需要1,3 或2,4 工作,控制偏航运动时需要5 或6 工作,控制滚转运动时需要2,3 或1,4 工作。
图2 姿控发动机安装示意图
由于姿控发动机的推力比较小,在接收到开机指令后能瞬间达到稳定值,因此忽略推力上升时间,将其看作常值。姿控发动机工作时产生的作用力矩分别是:
式中,Mx,My,Mz依次表示姿控发动机在弹体坐标系的作用力矩;Ly表示发动机1 ~4 推力作用点到弹体轴线的距离;Lx表示姿控发动机推力作用点到KKV 质心的距离;Fy,Fz表示相应工作状态下俯仰和偏航方向的作用力;Fi为滚动控制时发动机的推力大小。
2 姿控方案设计
2.1 滚动通道控制方案设计
当导引头开始工作时,目标很可能没有在视场范围内,需要KKV 调整姿态去捕获目标。由于滚转和俯仰通道共用4个姿控发动机,若2个通道均需要控制,则要考虑通道控制的优先级问题[4]。为减弱各通道之间的相互影响,本文优先控制滚转通道,当滚转通道无需再控制的情况下再进行其它通道控制。
KKV 滚动通道的转动动力学方程如下:

式中,Jx1,Jy1,Jz1为KKV 的转动惯量,在对称外形下,Jy1= Jz1;Mzx,Mgx为姿控发动机产生的滚动力矩,Mqx为气动力矩。姿控发动机推力恒定不变,在高空忽略空气动力的条件下,角速度变化的斜率应该保持不变。
假设中末制导交班时刻滚转角速度为0,期望系统按照图3 ~5 所示的理想情况进行控制。本文的滚动控制策略以侧窗系下视线方位角为依据,其最佳值为0° 。当达到最佳视线方位角时,理想的滚动角速度应该为0,使视线稳定在该位置。在目标刚好进入到导引头侧窗视场的时刻,即tc-Δt 时,控制力矩换向。为保证滚转角速度稳定时为0,加速滚动时间应与减速滚动时间相等,均为Δt,且其最大值Δtm应满足:

式中,qβm为侧窗系下视线方位角的边界值。
图3 滚转角变化曲线
图4 滚转力矩
根据上面的分析,设计如图6 所示的控制流程。
在捕获到目标之后,该控制方案同时可以保证导引头能很好地跟踪目标。
2.2 俯仰和偏航通道控制方案设计
俯仰和偏航通道控制可以采用滑模控制[5],以俯仰通道为例,选取滑动模态:
式中,φ 为KKV 的俯仰角,φr为其跟踪指令,控制量为姿控发动机的开、关机信号指令。这里跟踪指令选为地面系的视线高低角,但由于侧窗结构的存在,还要减去KKV 的半头锥角。若有最佳视线角要求,则可以跟踪常值视线角。
1)S1≥Δ1,发动机2,4 开,1,3 关;
2)S1≤- Δ1,发动机2,4 关,1,3 开;
比例系数K1,K2的选取对控制精度和跟踪速度都有影响,因此其大小选择至关重要。一般情况下,可以依托具体的模型,通过大量仿真来逐步筛选出合理的数值。
偏航通道用5,6 两个发动机进行控制,方案与俯仰通道类似,其滑动模态选择如下:

式中,ψ 为KKV 的偏航角,ψr为其跟踪指令,这里选为地面系下的视线方位角。对于2个比例系数和开机阈值的影响,分析方法与俯仰通道相同。
3 仿真分析
根据上面提供的方案,进行大气层外KKV 姿态控制仿真研究。采取准滑模控制时,俯仰和偏航通道控制器的相关参数设置如表1 所示。仿真结果如图7 ~10 所示。
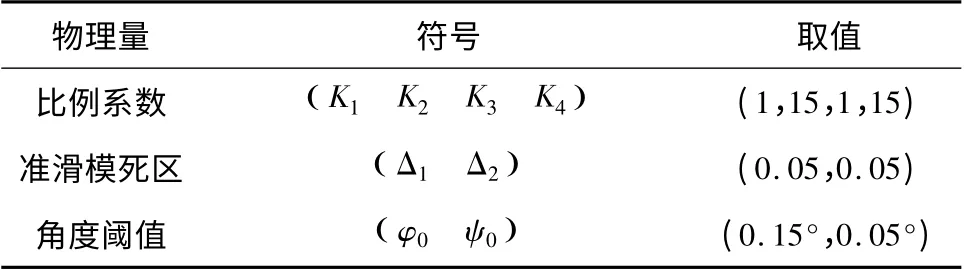
表1 KKV 姿控准滑模控制仿真参数
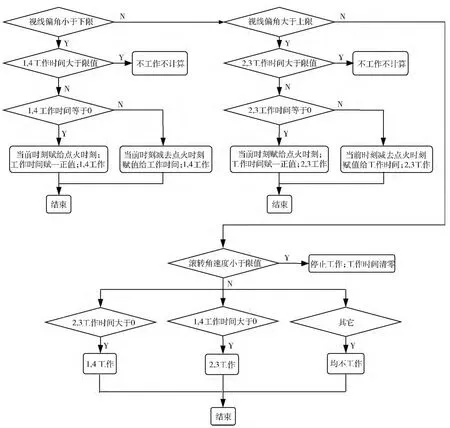
图6 滚动通道控制流程图
从图7 可见,根据视线方位角对滚动通道进行控制,有效保证了视线方位角回归到视场内,图8 中俯仰和偏航2个通道的角度跟踪误差均趋近于0,3个通道的控制策略,使侧窗系下的视线高低角和视线方位角都在规定的范围之内,表明导引头能很好地捕获和跟踪目标,如图9 所示。图10 为3个通道的发动机工作情况,可以看到,为了在稳定跟踪目标前提下能够最大效率地减小视线角速度,在目标进入导引头视场之后进行的俯仰和偏航控制,使这2个通道的发动机开关频率较高,且由于控制抖动,使目标经常到达视场边界,需要进行滚动控制使其回到视场中心。
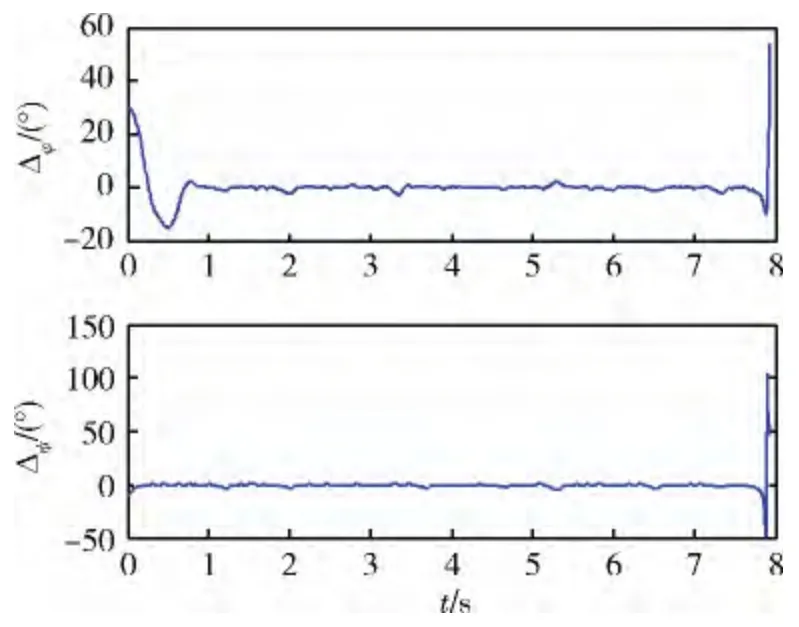
图8 俯仰和偏航通道跟踪误差
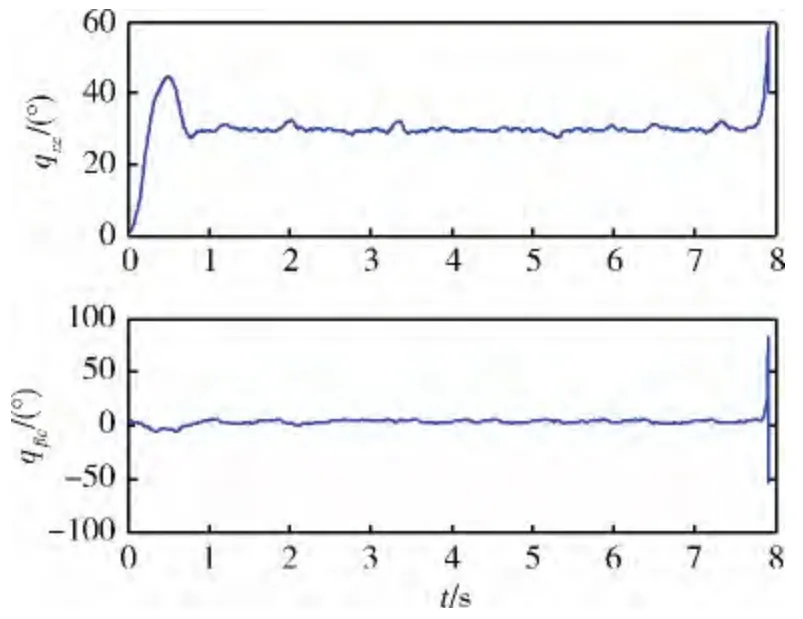
图9 侧窗系下视场角变化曲线
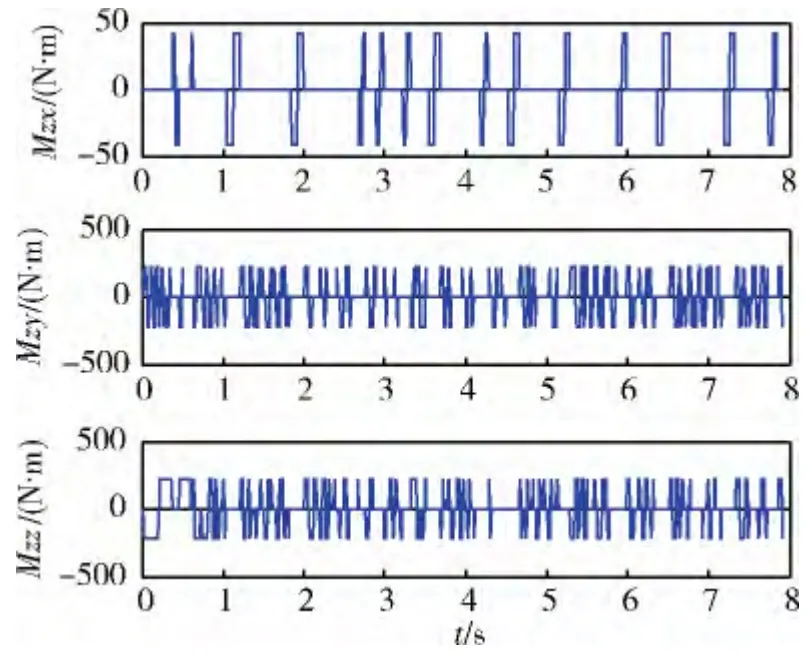
图10 姿控发动机工作情况
4 结论
给出了KKV 控制的姿控发动机模型,针对带侧窗的导引头,定义了侧窗坐标系,计算出侧窗系下的视线高低角和视线方位角,并根据这2个角度的视场约束,设计了高空滚动控制策略,用准滑模控制方法设计了俯仰和偏航通道的控制方案。仿真结果表明,本文设计的直接力姿态控制方案简单易行,对带侧窗导引头的飞行器姿态控制有较强的适应性,具有一定的工程应用前景。
[1]王戌瑞. 拦截弹中的红外技术[J]. 激光与红外,1999,29(1):3-8.(Wang Xurui.The infrared technology for the interceptor[J]. Laser and Infrared,1999,29(1):3-8.)
[2]范晋祥.美国动能拦截弹红外成像导引头的发展分析[J]. 红外与激光工程,2009,38 (1):1-6. (Fan Jinxiang. Development analysis of infrared imaging seekers of kinetic kill vehicles in america[J]. Infrared and Laser Engineer,2009,38 (1):1-6.)
[3]支强,蔡远利.动能杀伤器侧窗定向机制分析及建模[J].西安交通大学学报,2012,46(1):91-97. (Zhi Qiang,Cai Yuanli. On side window orientation of kinetic kill vehicle[J]. Journal of Xi’an Jiaotong University,2012,46 (1):91-97.)
[4]B J Strauss,R J Gravina,C J Hasenzahl,et al. All Attitude guidance and control for endoatmospheric intercepts[C]. AIAA SDIO Annual Interceptor Technology Conference,1993,AIAA 93-2643.
[5]Yeh F. K,Chien H. H,Fu L. C,Nonlinear optimal sliding mode midcourse controller with thrust vector control[C]. Proceedings of the American Control Conferrence,2002,1:348-353.
[6]宋明军,魏明英.侧窗探测条件下的制导控制系统设计方法研究[J]. 现代防御技术,2007,35(5):71-75.(Song Mingjun,Wei Mingying. Control and guide system design method for side window detection[J].Modern Defence Technology,2007,35(5):71-75.)
[7]杨宝庆,姚郁,贺风华. 大气层外拦截器开关式姿态控制律设计[J]. 哈尔滨工业大学学报,2010,42(1):5-8.(Yang Baoqing,Yao Yu,He Fenghua. Design of on-off Attitude Control Law Based on Model Predictive Control[J]. Journal of Harbin Institute of Technology,2010,42 (1):5-8.)
[8]章虹虹,姜杰.准滑模控制在大气层外拦截器姿态控制中的应用[J]. 航天控制,2007,25 (5):39-42.(Zhang Honghong,Jiang Jie. The application of pseudsliding mode control in attitude control for EKV[J].Aerospace Control,2007,25 (5):39-42.)
猜你喜欢
装备制造技术(2021年1期)2021-05-21 07:54:44
中国电气工程学报(2019年20期)2019-09-10 00:05:56
自动化学报(2018年2期)2018-04-12 05:46:05
企业科技与发展(2017年9期)2017-05-30 10:48:04
通信电源技术(2016年4期)2016-04-04 02:57:36
制导与引信(2016年3期)2016-03-20 16:01:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
弹箭与制导学报(2015年1期)2015-03-11 15:32:08
弹箭与制导学报(2015年1期)2015-03-11 15:32:06
计算机辅助工程(2014年1期)2014-03-13 08:26:03
