
多自由度空间机械手嵌入式控制系统研究
2015-12-05 05:11叶玉璇杨俊峰陆俊百
航天控制 2015年4期
李 楠 霍 宏 叶玉璇 杨俊峰 陆俊百
北京航天自动控制研究所,北京100854
随着航天技术的迅速发展,主要太空强国的空间活动变得日益复杂和频繁,航天器在轨维护[1]、深空探索[2]、空间站建设[3]和非合作目标捕获[4]等复杂太空活动以及代替人类进行空间站值守的机器人宇航员[5]项目催生了空间机械手的迅速发展与广泛应用。目前空间机械手主要分为2 大类[6]:1)多用途灵巧机械手,多用于装备机器人宇航员和火星探索机器人等;2)是满足特定任务的专用夹持器,多用于空间站建设、航天器转运等。专用夹持器虽然结构简单,控制方便,负载能力强,但仅对少量特定接口和形状的物体适用,不能满足航天作业中各种灵巧和精细操作任务的要求。而多指灵巧机械手自适应能力强,可抓取多种物体和工具,具备完成复杂的维修与捕获任务的能力而成为今后空间机械手研究的热点。本文为一种重量轻,灵活度高,具有多种传感信息感知能力的空间机械手样机设计了控制系统,以实现机械手对目标物体稳定、可靠的抓取控制。
1 机械手本体
文中的空间机械手在结构和外形设计上考虑了人手的特点,由5 根手指、手掌盖板、手背盖板以及手腕组成,体积为158mm×76mm×21mm,相当于一般人手的90%,重量约为420g。5 根手指由5 枚集成于手掌内部的直流伺服电机分别驱动,从而使每根手指都具备单独动作的能力。各个手指均由近指节、中指节、指尖以及基关节、中关节和远关节组成,内部传动采用4 连杆耦合机构实现,从而使机械手具有了5个自由度和多达15个转动关节,如图1 所示。对假手掌部也进行了模仿人手曲面的设计:在高度方向,食指、无名指、小指基关节分别相对中指基关节下移;在厚度方向,相对中指基关节前移,再相对各自电机轴线旋转,从而形成弧面,见图1。
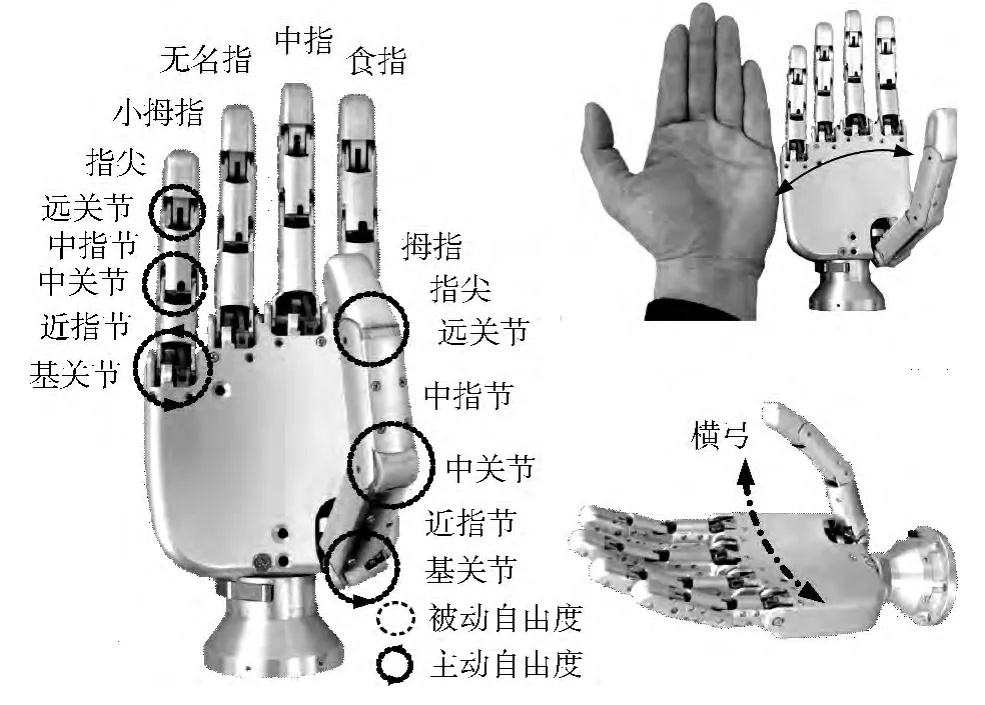
图1 空间机械手结构
2 机械手嵌入式控制系统
空间机械手嵌入式控制系统由传感器系统和运动控制系统组成。传感器系统由关节力矩传感器、关节位置传感器和电机编码器组成,用于向运动控制系统提供所需的手指力矩、位置和速度信息。运动控制系统用于实现对机械手各手指的运动控制,并通过通讯接口与上位机通讯。下面将对该控制系统进行详细介绍。
2.1 传感器系统
凭借丰富的感知能力,人手得以在各种环境中对不同物体进行自如的操作。同样,在空间机械手控制系统中,具有感知功能的传感器系统对机械手的操作性能也具有重要影响。传感器系统作为闭环运动控制策略中的反馈信号获取环节,需要向控制器提供传感信息。因此,传感器系统中所采用传感器的数量多少、性能高低以及种类的丰富程度将大大影响机械手的操作性能和抓取智能。
本文的空间机械手集成了3 种传感器,分别为基关节巨磁阻式绝对位置传感器、基关节一维应变式力矩传感器以及电机编码器。其中,每根手指均配备有基关节绝对位置传感器,而基关节力矩传感器仅配备在除小指外的其他各手指内。另外,拇指、食指和中指这3 根主要的动作与操作手指均带有电机编码器。传感器的具体配置如图2 所示。
2.1.1 基关节绝对位置传感器
该传感器的敏感元件是巨磁阻式(Giant Magneto Resistive,GMR)传感器芯片,安装在基关节内电机轴正上方。而在电机轴的轴端则安装有一个圆柱形磁钢。当电机轴转动时,固定在轴端的磁钢随转轴一起旋转,其旋转磁场与GMR 元件表面平行。GMR 元件在旋转磁场的作用下,输出相位相差90°的正弦和余弦信号,通过有源低通滤波器对该信号进行放大和滤波处理,然后送入运动控制系统的DSP,通过A/D 采样通道进行模/数转换。基于GMR 的基关节绝对位置传感器的测量与处理原理如图3 所示。
对传感器信号Sin_out 和Cos_out 完成采样之后,还需要对其进行规一化处理,从而得到幅值为[-1,1]的信号数据Vsin和Vcos,然后再使用式(1)和(2)进行计算,即可得到旋转角度θ。


图2 空间机械手手指内集成的传感器示意
2.1.2 基关节力矩传感器
基关节力矩传感器用于检测手指基关节处的力矩。设计时为了实现高度的集成化,直接选择手指基关节处的驱动连杆作为力矩传感器的弹性体,将应变片粘贴在驱动连杆悬臂梁处的上、下表面,见图4。
当电机转动时,驱动力引起驱动连杆的弹性变形即可促使其上、下表面的应变片阻值发生变化。力矩传感器的检测电路如图4 所示,由2 片应变片和2个电阻组成桥式电路,将应变片的阻值变化转化成电压变化接入到仪表放大器。然后经过低通RC 滤波器滤波后,由运动控制系统的DSP 通过A/D 转换通道完成信号采集。再根据分压值与力矩的线性关系,经标定后便可实现对基关节力矩的测量。
2.1.3 电机编码器
拇指、食指和中指的驱动电机采用Faulhaber 公司的直流有刷微电机,电机后部集成磁阻编码器。该编码器输出2 路相位差90°的信号。电机每转1周,各路信号会输出50个方波脉冲。电机编码器可用于测量电机的转速、转向和位置信息。编码器信号分辨率较高,但只能提供相对位置,可与基关节位置传感器联合使用来确定手指的当前位置,以获得较高的测量精度。
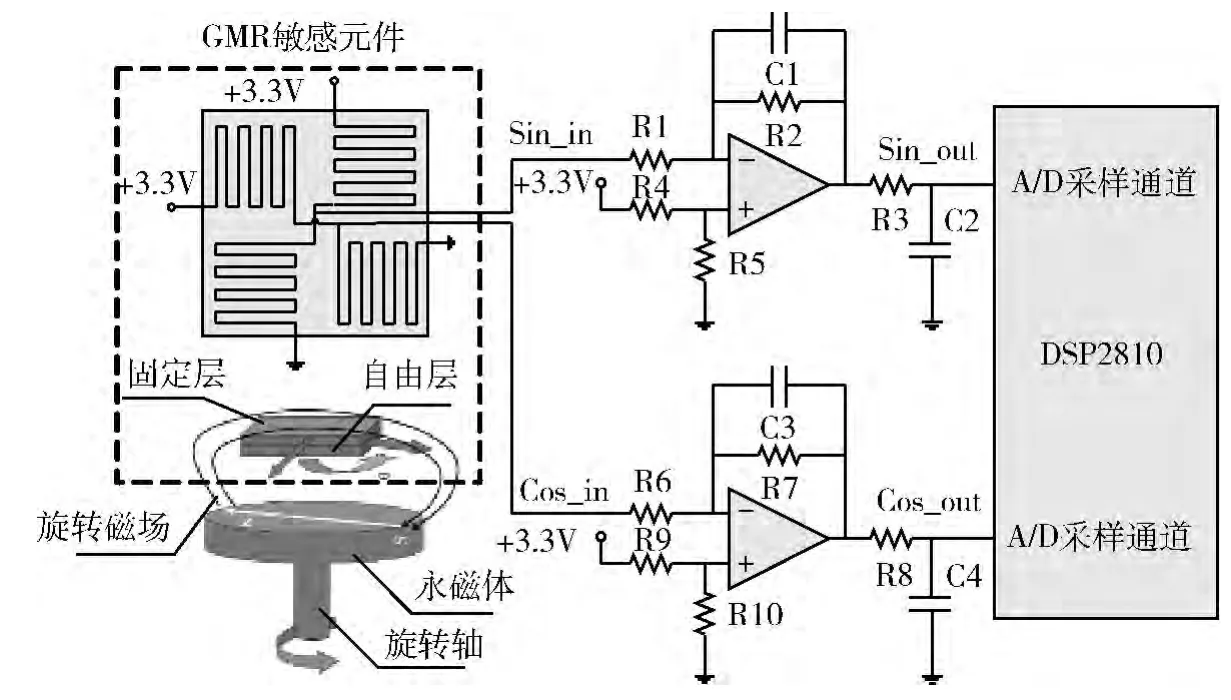
图3 GMR 传感器测量原理图
2.2 运动控制系统设计
运动控制系统在机械手的控制过程中需要完成多种任务,主要包括:1)执行控制流程和算法计算;2)传感器数据采集;3)电机驱动;4)与上位机通讯。根据上述功能需求,本文采用以高性能处理器芯片为核心,外围匹配辅助电路的方式来实现运动控制系统的电路设计。在处理器芯片选择上,需要该芯片具有很高的运算速度来实现实时流程控制和算法计算,大量的A/D 转换通道进行传感器数据采集,多通道的PMW 波输出能力来产生对各个手指直流电机的控制信号,还需要具有丰富快速的通讯接口来完成与上位机交换数据的任务。而外围电路的设计主要是辅助处理器核心完成对电机编码器信号的处理,PWM 控制信号到驱动信号的转换,传感器信号的滤波以及通讯接口的物理层实现。根据上述设计思路,本文选择TI 公司生产的DSP 芯片TMS320F2810 作为该系统的处理核心,该芯片是一种32 位定点处理器,工作频率为150MHz,拥有丰富的外围设备,包括:2 路串行通讯接口(SCI)模块,1路区域网络控制器(CAN),1 路串行外围接口(SPI)模块,16 通道12 位A/D 转换器,12 路(6 组)PWM通道以及3 路外部中断通道。设计中,14个A/D 转换通道用于采集5个位置传感器和4个力矩传感器的信号,通过CAN 总线与上位机通讯,通过5 组PWM 信号经3 片直流电机驱动芯片完成对5个电机的调速控制与驱动。另外,配以CPLD 芯片EPM7064 作为协处理芯片用于对电机编码器信号进行倍频和判向处理,并将处理后的信息转递给DSP。采用直流电机驱动芯片MPC17531 完成对PWM 控制信号的功率放大。另外采用CAN 总线收发器芯片构建通讯接口。运动控制系统的结构如图5 所示。机械手嵌入式控制系统实物如图6 所示。
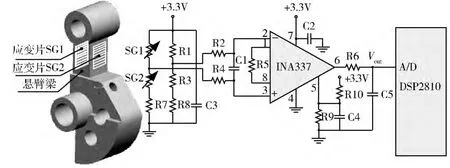
图4 基关节力矩传感器信号测量原理

图5 运动控制系统框架
2.3 运动控制算法设计
为减少机械手抓取物体时的冲击,提高抓取柔顺性和稳定性,在对各手指的运动控制中采用了基于位置的阻抗控制策略,可同时实现在自由空间的位置控制和约束空间的力矩控制。由于该阻抗控制策略可以将反馈的力矩信号转换为位置修正量,使手指像弹簧一样工作,从而降低了假手抓取物体的瞬时接触力,使抓取更加柔顺。控制框图如图7 所示。

图6 空间机械手嵌入式控制系统实物图
图中位置控制环使用增量式PID 控制器,直流电机通过PWM 方式控制。绝对位置传感器向PID控制器返回电机实际转动位置θ。控制位置θc与实际转动位置θ 作差,得到位置偏差量Δθ。根据方程(3)和(4)可得输出量Un。

其中,Δθn,Δθn-1,Δθn-2分别为第n,n -1,n -2个采样时刻的位置偏差值,ΔUn为第n个采样时刻的输出量增量值,Un-1为第n -1个采样时刻的输出量,Kp,Ki和Kd分别为PID 控制器的比例、积分、微分系数,Keq为折算比例系数。
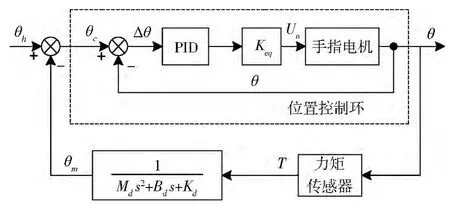
图7 基于位置的阻抗控制框图
力矩环中,力矩传感器测量值Tcon通过阻抗滤波器产生一个修正位置θm:

式中,Md是目标惯量,Bd是目标阻尼,Kd是目标刚度。修正位置θm与期望位置θh相减得到控制位置θc作为位置控制器的输入。
3 机械手运动控制实验
为了检验控制系统对空间机械手的控制效果,设计了多指抓取控制实验进行验证。本文将机械手与上位机通过CAN 总线连接,如图8 所示,上位机通过控制界面向机械手发送运动控制指令,实现对铁质圆柱体的抓取。各个手指的运动规律为:食指、中指、无名指和小指按基关节旋转0°→40°→50°→60°→70°→0°的顺序抓握,拇指按基关节旋转0°→15°→21°→27°→33°→0°的顺序动作,图9 是各手指在抓过程中的位置传感器和力矩传感器数据。

图8 假手运动控制实验平台
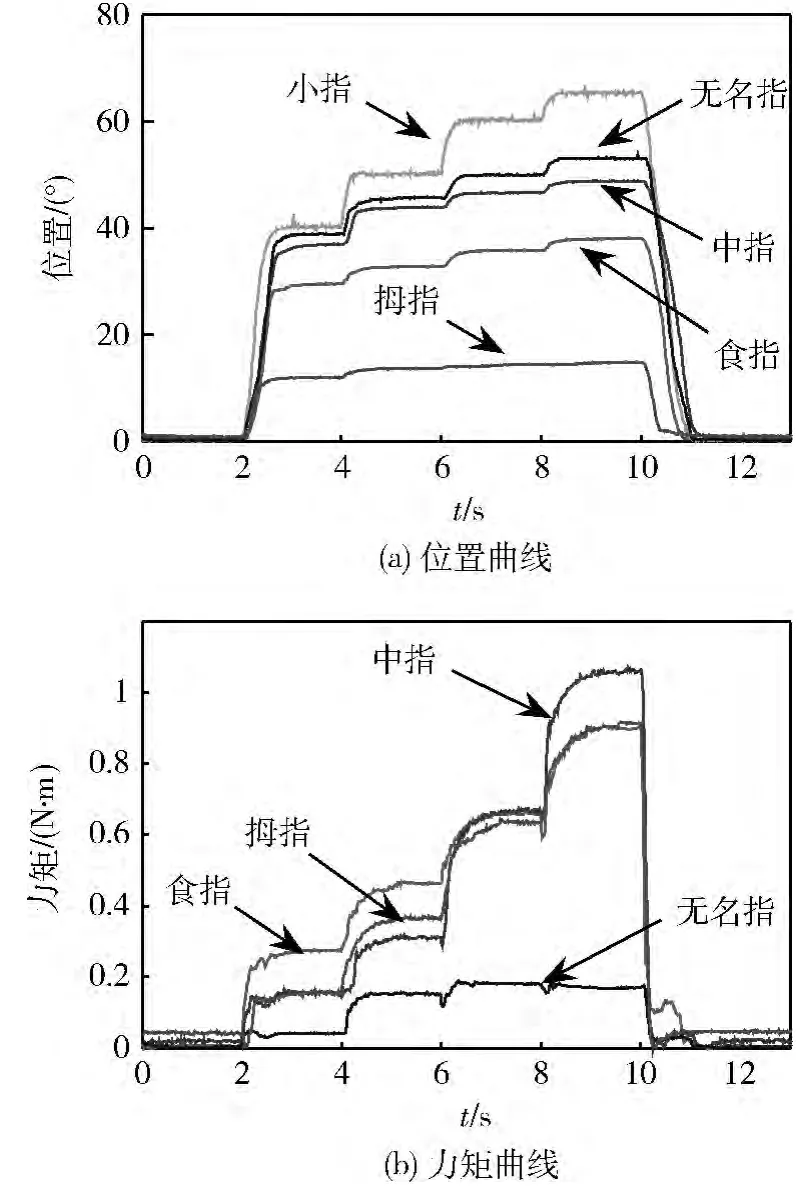
图9 机械手抓取实验曲线
从图9 可以看出,拇指和食指最先碰触到抓取物,然后中指和无名指相继与抓取物接触,小指在从60°→70°的运动过程中最后与抓取物接触。在逐级握紧过程中,力矩梯次增强。由于采用了阻抗控制算法,在抓取过程中,实现了从自由空间到约束空间的柔顺过渡,减小了冲击,使抓取过程更稳定。
4 结论
为多自由度空间机械手设计的嵌入式控制系统由传感器系统和运动控制系统构成。该系统集成于空间机械手的手掌及手指内部,以DSP 为控制处理核心,实现了闭环运动控制、传感器数据采集、处理和传递。通过基于位置的阻抗控制算法完成手指的运动控制。实验表明,该控制系统降低了机械手抓取物体时的冲击力,提高了抓取的柔顺性、可靠性和适应性。
[1]Morteza H,Ehsan S,Payam Z ,et al. Manipulation control of multi-body free-floating space robot based on software combination[C]. Proceedings of the 1th RSI/ISM International Conference on Robotics and Mechatronics,2013,271-276.
[2]William R D,John T D,Thomas C J,et al. Development of a Tendon-Actuated Lightweight In-Space Manipulator[C]. Proceedings of the 42nd Aerospace Mechanisms Symposium,NASA Goddard Space Flight Center,2014,1-14.
[3]Feng F,Liu Y W,Liu H,et al. Development of space end-effector with capabilities of misalignment tolerance and soft capture based on tendon-sheath transmission system[J]. Journal of Central South University,2013,20(11),3015-3030.
[4]Tafazoli M. A Study of On-Orbit Spacecraft Failures[J]. Acta Astronautica,2009,64(2-3):195-205.
[5]William B,Robert A,Myron D,et al. Robonaut:A Robot Designed to Work with Humans in Space[J].Autonomous Robots,2003,14(2-3):179-197.
[6]丁祥峰,孙怡宁,卢朝洪,等.基于多感知的空间机械手爪控制研究[J]. 控制工程,2005,12(4):302-304.(DING Xiangfeng,SUN Yining,LU Chaohong,et al. Space Manipulator Control Based on Multi-sense[J].Control Engineering of China,2005,12(4):302-304.)
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
成都信息工程大学学报(2018年3期)2018-08-29
山东青年(2016年12期)2017-03-02
电子设计工程(2017年20期)2017-02-10
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
通信电源技术(2016年1期)2016-04-16
电子器件(2015年5期)2015-12-29
探测与控制学报(2015年4期)2015-12-15
机电信息(2015年3期)2015-02-27
