
运载火箭飞行诸元快速生成与自动测试仿真系统研究
2015-12-05 05:11贺彦峰胡任祎章虹虹
航天控制 2015年4期
贺彦峰 胡任祎 章虹虹
北京航天自动控制研究所,北京100854
飞行控制软件是运载火箭控制系统方案的具体实现,包括程序代码和飞行诸元参数2 部分,其中程序代码根据运载火箭的控制系统方案设计实现,飞行诸元则需要根据具体任务要求生成。飞行诸元中主要包含瞄准诸元、点位诸元、控制诸元和时序参数等多项内容,数量异常庞杂。随着航天发射任务领域的不断拓展和升级,在几小时或几天内将卫星快速准确地发射入轨,或快速修复关键空间系统,已经成为未来航天发射技术新的发展方向之一。如何在短时间内完成飞行诸元的生成和测试,确保飞行诸元正确,显得尤为重要。以往该项工作多采用人工手动修改相关参数,并通过人工比对的方式进行,不仅时间周期冗长,执行效率低下,而且存在人为因素造成诸元生成和比对发生错误的风险。本文提出了一种解决方案,可以实现运载火箭飞行诸元快速生成与自动测试,既能确保飞行诸元生成的快速性和正确性,又能确保各项诸元参数在运载火箭射前的测试充分和覆盖。
1 飞行诸元生成与测试现状
目前多数运载火箭从弹道规划、标准弹道计算、控制参数生成、数学仿真计算和飞行诸元生成,到后期的半实物仿真验证等工作,均是根据任务接口关系分别由不同的分系统独立承担。从参数设计、飞行诸元生成和验证,直至最终装订到运载火箭上,整个流程需经过多个系统,历时数十小时甚至数天。由于运载火箭飞行控制诸元中包含大量的制导、姿控和时序参数,如此繁多的数据参数和状态的正确性难以有效把控,给运载火箭发射前的使用操作带来极大不便。单靠诸元准备人员手动计算和判断,难以保证运载火箭飞行控制诸元的正确性,任何一点疏忽均可能导致严重后果。
在运载火箭控制系统研制过程中,为了检验制导和姿控性能指标,构建了以数字计算机技术为核心的高性能仿真系统测试平台,建立了基于通用软硬件架构和集成式的高性能仿真系统体系结构平台,实现了基于基本型的通用模件型谱、系统接口和支撑软件环境等内容。上述工作为运载火箭飞行诸元快速生成与测试系统设计奠定了技术基础和软硬件支撑。
2 系统方案研究
为改善运载火箭飞行诸元生成与测试现状,提高工作效率和测试可靠性,提出了一种运载火箭飞行诸元快速生成与测试系统方案。该系统从功能上可划分为2个子系统:飞行诸元快速生成系统和飞行诸元快速测试系统,以下将分别简称“生成系统”和“测试系统”。通过对设计、试验和接口关系的合理整合,构建包括箭载计算机和飞行控制软件在内的闭路仿真测试环境,为控制系统飞行软件模拟运载火箭真实射前及飞行状态下的输入输出接口环境,实现对飞行诸元的快速生成与测试。
2.1 硬件框架
该系统硬件框架是利用半实物仿真技术,采用CPCI/PXI 总线标准,提供符合CPCI 规范的各种控制接口,使系统能够连接箭载计算机并模拟其它飞行控制单机设备,构成各种灵活多样的测试应用系统。利用其内部独有的实时处理和调度能力,构建强实时、闭路的测试系统以及各种等效试验环境,为飞行控制软件模拟运载火箭真实射前及飞行状态下的输入输出接口环境。系统硬件组成如图1 所示。
虽然2个系统功能上是相互独立的,但是为了确保最终提供的生成结果正确无误,需要一套具备“指令输入—标准弹道计算—数学仿真—成果生成—成果验证”功能的一体化流程工具。在方案设计时通过高速通讯总线将内部多个系统连接起来,形成松耦合的多处理机系统,通过内存数据共享的方式实现系统中不同模块节点之间的通信,形成高性能的闭路仿真系统,并从物理连接上将上述2个子系统设计开发为一个集成的飞行诸元快速生成与测试系统。
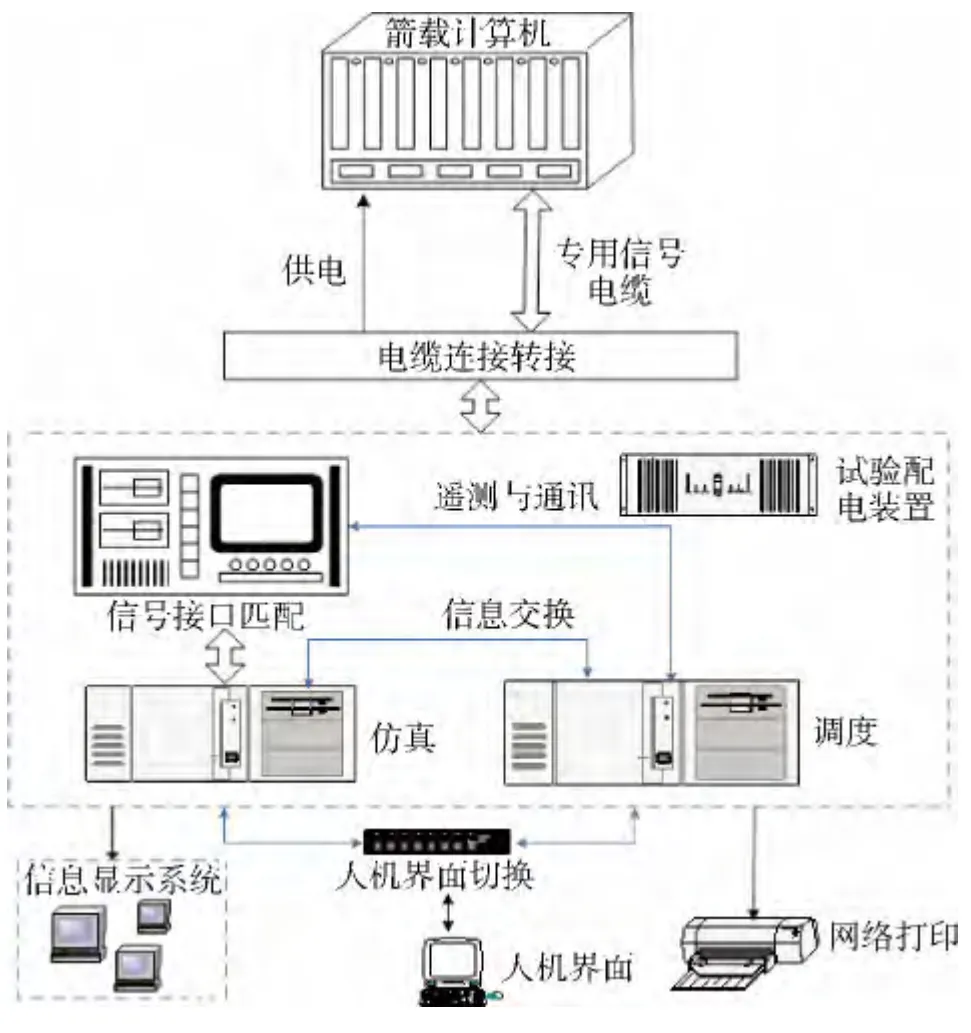
图1 飞行诸元快速生成与自动测试系统硬件组成示意图
2.2 软件框架
飞行诸元快速生成与测试系统软件系统框架如图2 所示。
2个子系统中的上层软件作为各自的控制软件,布置在Windows 系统层,处于非实时的运行状态,主要完成非实时要求的运载火箭飞行诸元生成及外部通讯等功能;下层软件完成与测试相关的有强实时性能要求的软件。下层软件通过共享内存和各自的上层软件完成信息交互,通过实时网完成2个子系统之间的信息交互。
3 关键技术及实现
该运载火箭飞行诸元快速生成与自动测试系统在软硬件架构设计及安全管理等方面采用多种关键技术,主要包括以下几项:
1)执行流程模式化设计技术;
2)Windows 环境下的实时仿真技术;
3)BIT 在线系统自检测技术;
4)控制参数自动设计算法;
5)仿真结果的自动判读及输出成果正确性检验技术;
6)使用安全性控制技术。
3.1 执行流程模式化设计技术
在执行流程模式化的实现上,为方便用户使用,结合运载火箭飞行诸元生成与验证的特点,设计了多种执行流程模式组合,如图3 所示。用户根据需要可设置流程为自动或手动模式、是否生成光盘和是否进行飞行诸元验证等。根据用户设置,软件将自动设置界面按键状态,防止用户误操作。
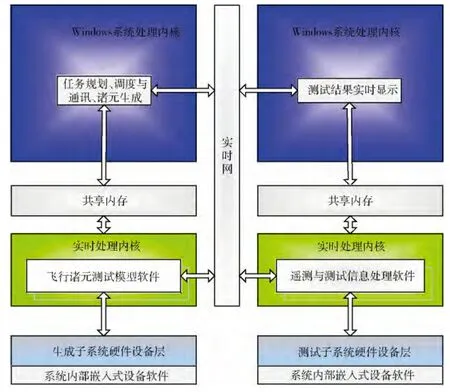
图2 飞行诸元快速生成与测试系统软件框架
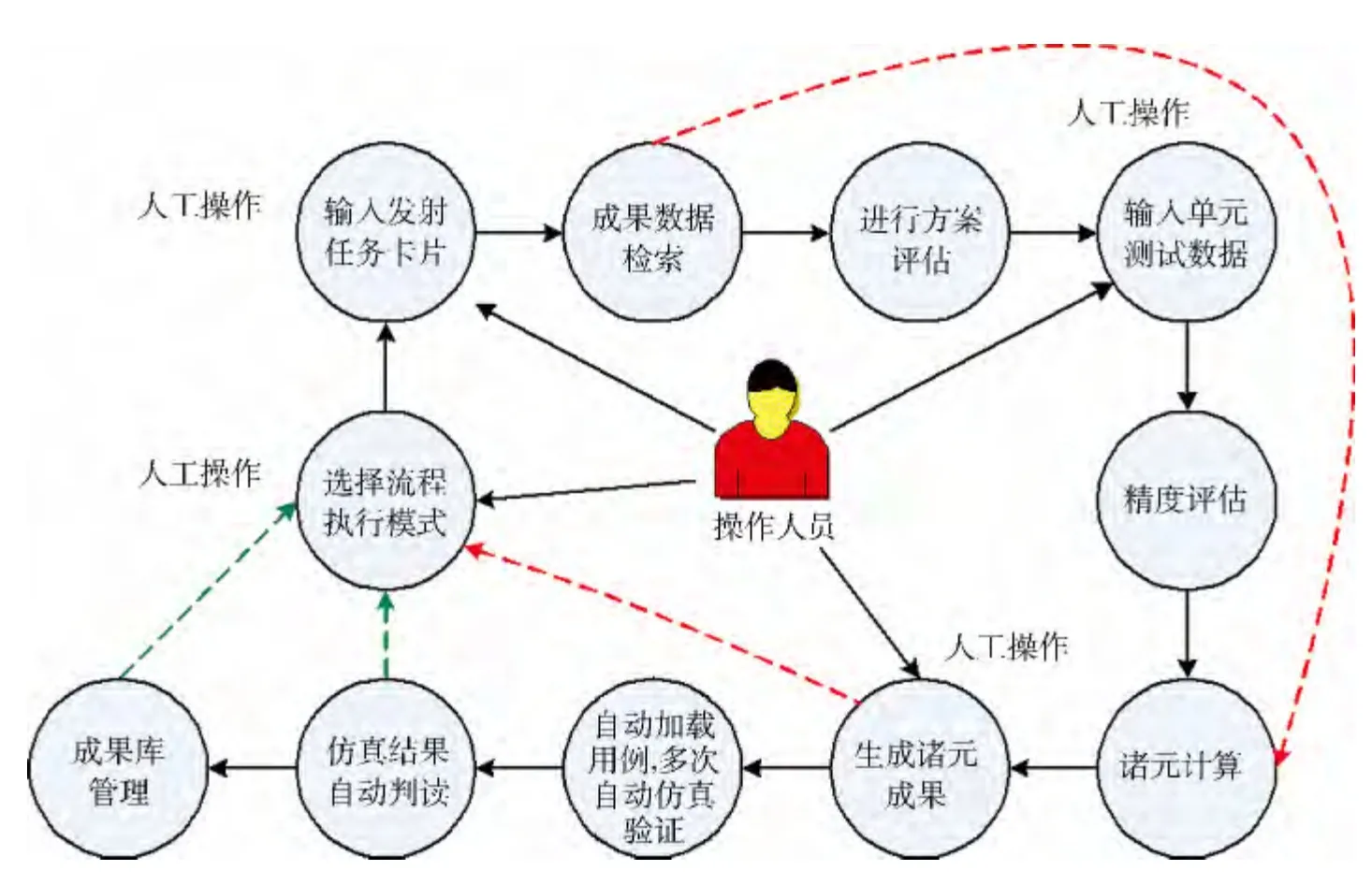
图3 执行流程模式化的示意图
3.2 Windows 环境下的实时仿真技术
鉴于Windows 操作系统的高性能和低价格,以及支持多种开发工具和丰富的Win32 应用程序接口,大众接受程度和市场占有率日益扩大。由于无法满足硬实时系统严格的响应时间要求,限制了其用于高实时仿真的应用与开发,因此如何通过附加软件在Windows 环境下实现所需要的硬实时特性就变得愈加重要。美国Ardence 公司的RTX 产品即是基于此而开发出来的,该产品最大的优势在于使用通用的Intel X86 的硬件,采用Win32 API 编程方法,在Win2000/NT/XP/XPe 平台上实现一个健壮的强实时子系统,该方案可实现微秒级的实时控制和高速数据采集。
基于该实时仿真方案,运载火箭飞行诸元快速生成与自动测试系统采用双机(仿真机和遥测机)双核(Windows 系统层和实时内核层)的网络环境。将具有实时性要求的软件布置在系统的实时内核层。实时内核层软件由Windows 系统层软件按流程加载启动;2 机之间通过实时网进行信息和指令交换。同机的Windows 系统层模块和实时内核层模块通过共享内存进行信息和指令交换,信息和指令交换采取触发事件响应。由此满足了在Windows 环境下用户与程序良好的交互性和易用性,同时满足了在Windows 环境下拥有可靠的实时特性。
3.3 BIT 在线系统自检测技术
系统内部设计在线系统自检测功能,通过系统电缆的插入位置,自动识别出是仿真状态还是自检状态。在自检状态,系统自动调入单元测试程序,并通过多功能测试电路和继电器切换矩阵等效箭载计算机的接口收发电路,自动进行自检测试,并直观给出测试结果。图4 为自检测单元测试的操作界面。

图4 BIT 自检测单元测试界面
3.4 控制参数自动设计算法
控制参数自动设计算法的关键是针对不同的弹道和轨道参数,自主寻找控制参数和轨道特征参数之间的关联和影响,建立参数设计计算的判据和寻优流程算法。摄动制导参数的设计采用弹道法计算;迭代制导参数的实现是根据推进关机时的剩余需要速度和偏航程序角速度、星箭分离时刻轨道参数偏差等特征参数,在零干扰弹道下进行迭代自动调整。
3.5 仿真结果的自动判读及输出成果正确性检验技术
通过对仿真结果数据的自动判读,判断运载火箭飞行诸元的正确性。通过对不同特征参数的判别,确保所有飞行诸元均经过测试,并分析判读结果,指出具体的超差项目。为了确保判读的精准性和合理性,对零干扰状态和非零干扰状态设计了不同的判别门限值,判读软件通过接口文件读入试验状态,自动选取相应的判别门限值,提高判别的准确度。所有判读结果均按类编排,通过图形和文本的形式直观地显示在交互界面上,便于操作人员迅速、清晰地了解试验结果。
3.6 使用安全性控制技术
为确保整个系统的安全性,采用3 级密码系统登录控制,2 级使用权限,控制用户的合法访问权和使用权。通过专用软件控制开机,直接进入程序,退出程序,直接关机。操作系统采用按需裁减方式,并将系统的数据硬盘采用屏蔽保护措施,利用嵌入式操作系统生成的带有数据写过滤技术的操作系统底层文件,加载到生成系统的Windows 操作系统中,并通过修改注册表信息代替原版Windows 操作系统,在系统启动后形成对系统硬盘的写保护,将所有在系统层的写入操作映射到内存,禁止非授权操作,杜绝非法信息输入,建立物理软防火墙,切断病毒途径,保证每次系统启动时处于原始出厂状态,见图5。
4 结论
针对未来运载火箭快速发射的任务需求,开展了具体需求分析和方案研究,构建了运载火箭飞行诸元快速生成与自动测试系统,实现飞行诸元从准备到测试再到实施的全过程自动化。该系统有效精简和优化了运载火箭发射前诸元准备和测试的流程,大幅提高了运载火箭发射前准备的时效性和可靠性,为运载火箭快速响应和快速发射提供了强有力的技术支撑。

图5 系统数据硬盘写防护示意图
[1]徐延万. 弹道导弹、运载火箭控制系统设计与分析[M].北京:宇航出版社,1999.
[2]陈世年. 控制系统设计[M]. 北京:宇航出版社,1996.
[3]张涛,等.弹道导弹诸元准备研究[J].导弹与航天运载技术,2009(6):16 -18.
猜你喜欢
飞控与探测(2022年6期)2022-03-20
今日农业(2021年10期)2021-07-28
力学学报(2020年4期)2020-08-11
铁道通信信号(2018年8期)2018-11-10
电子测试(2018年13期)2018-09-26
电子制作(2018年11期)2018-08-04
劳动保护(2018年5期)2018-06-05
黑龙江电力(2017年1期)2017-05-17
国际医学放射学杂志(2016年4期)2016-08-22
办公自动化(2016年18期)2016-08-20
