
基于K均值聚类算法的雾天识别方法研究
2015-12-02 21:02孟凡军李天伟徐冠雷韩云东
现代电子技术 2015年22期
孟凡军+李天伟++徐冠雷+韩云东

摘 要: 为实现视频监控设备对雾天天气现象的自动识别,提出了基于K均值聚类算法的雾天天气现象自动识别方法。该方法通过分析雾天天气现象对视频图像采集的影响,提取图像饱和度的均值、方差为特征参数,并利用K均值聚类算法对训练图像进行分类,得到不同图像类别的聚类中心,测试阶段计算不同图像与聚类中心的相异度即可完成分类。实验结果表明,该方法简洁高效,易于实现对大规模图像数据的处理,并能实现图像分类后类别的标注,对雾天的识别率高于90%。
关键词:雾天; 自动识别; K均值聚类算法; 图像饱和度
中图分类号: TN958?34; TP391.4 文献标识码: A 文章编号: 1004?373X(2015)22?0080?04
0 引 言
现代海战往往是多军、兵种的协同作战。在影响战斗力的诸多因素中,天气是惟一无法加以控制但又具有决定意义的因素。当舰船在雾中(包括雾、雨、雪等能见度不良天气条件)航行时,其定位、导航、规避等都会受到相当大的影响。同时,在城市生活中,雾也是一种常见的视程障碍类天气现象,对当地生产、生活和交通都产生着极大影响。而目前在气象领域,我国气象台站的天气现象业务仍以人工观测为主,未完全实现自动化,天气现象信息的采集耗费了大量的人力和物力。因此近年来,在智能视频和图像理解技术的不断发展下,基于视频图像数据的天气现象自动识别研究也受到了较为广泛的关注[1?3]。
1 研究现状
近年来,人们已从不同角度对雾天天气现象识别进行了研究,并取得了一定的成果。文献[1]主要针对室外图像,着重分析了天气现象对图像采集的影响,并提取图像各项特征进行训练分类,对雾天的识别率[1]高于85%;文献[3]对原有的双色模型算法进行改进,用于识别包括雾天在内的视程障碍类天气现象[3]。文献[4]对同一场景采集不同天气条件下的视频图像,采用了一种多垂线检测方法,提高了雾天天气识别的正确率[4]。文献[5]提取差分图像的纹理特征识别出当前天气,并实现了对雾天交通图像的快速去雾[5]。
以上这些方法所提取图像特征较为固定,对大规模数据的处理不够高效,对雾天识别的针对性不强,不能充分满足当前应用需求。
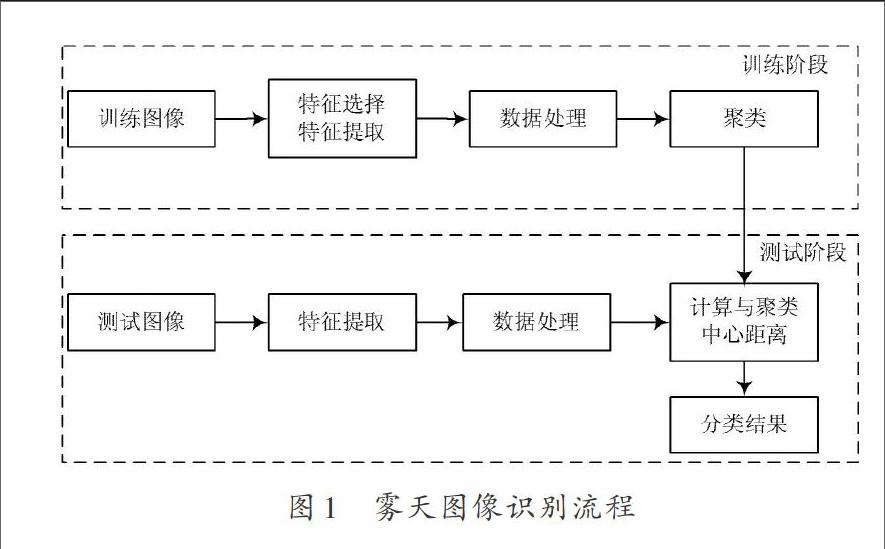
为更快速高效地实现雾天的识别与分类,本文针对雾天视频图像进行分析,提取图像饱和度特征,并计算饱和度均值与方差,最后利用K均值聚类算法进行分类识别。其基本流程如图1所示。
2 图像特征提取
2.1 雾天对图像采集的影响
雾天天气条件下,大气中的气溶胶含量很高,此时在可见光波段,由于气溶胶对光波的散射作用,通过视频成像系统获得的图像都会有一定程度的降质[4]。
雾气形成后,大气粒子会形成许多反射面,并且部分大粒径粒子会遮挡光线,这时自然光线无法穿透,而是被反射出来,各种颜色的光线被反射掉的同时也会产生衰减,雾就变成“白茫茫”的了。
这时候在所采集视频图像上的直观反映就是饱和度的降低。基于此,提取图像饱和度的均值与方差作为识别雾天天气现象的特征。
2.2 雾天图像特征提取
本文首先进行图像由RGB模式到HSV模式的空间转换,并从采集图像集中随机选100副图像(50副雾天图像,50副非雾天图像)作为训练图像,提取图像的饱和度特征,并计算图像饱和度的均值与方差,最后利用K均值聚类算法进行分类。
RGB(物理三基色)模式是色光的彩色模式,R,G,B分别代表红、绿、蓝3种不同的颜色,3种色彩叠加形成了其他的色彩。HSV是一种主观彩色模型,不是将某种特定的颜色分解为三原色,而是描述颜色的三种属性,分别为色调(Hue)、饱和度(Saturation)和纯度(Value)。其中,饱和度值表示颜色中掺入白光的比例,纯光谱的含量越多,其饱和度值也就越高[6]。
对于任何3个在[0,1]范围内的R,G,B值,其对应的HSV模式中的S(饱和度)分量可以由下面给出的公式[6]计算:
[S=1-3R+G+Bmin(R,G,B)] (1)
本文在该部分提取图像饱和度为特征,计算其均值与方差,并形成二维数据集。
3 K均值聚类算法在雾天识别中应用
3.1 算法概述
聚类描述的是一个无监督统计过程,该过程将物理或抽象对象的集合,按照一定的计算方法,分成多个类。聚类后所生成的类是一组具有相似特征的数据对象的集合,同一类中的对象彼此相似,不同类中的对象彼此相异[7]。常用的聚类方法主要有划分法、层次法、密度法、网格法以及模型法五种[7?9]。
K均值聚类是最著名的划分聚类算法,因简洁和高效而被广泛使用。通常,给定一个数据点集合以及需要的聚类数目K(K由用户指定),K均值聚类算法便会根据某个距离函数(本文采用欧式距离)把对象分为K个聚类。这个过程中,首先要随机选取K个初始聚类中心,然后计算每个数据对象与各个聚类中心之间的距离(本文计算欧式距离),根据所得值将每个对象分配给距离它最近的子聚类。
聚类中心以及分配给它们的对象所形成的簇集就代表一个聚类。全部对象都被分配后,会根据聚类中现有的对象重新计算每个聚类的聚类中心。这个过程将不断重复,直到数据集中的任何一个对象不再被分配给不同聚类,或者所得到的聚类中心不再发生变化[9?10]。
3.2 算法流程
Step1:预处理,数据规格化
提取训练图像的特征值,并对特征值进行规格化。也就是按照一定比例,完成所提取图像特征值到相同取值空间的映射,从而平衡各个特征值对距离的影响。本文将各个特征值映射到[0,1]区间,映射公式如下:
[ai′=ai-min(ai)max(ai)-min(ai)] (2)
式中[ai]代表选择的图像特征值。本文提取图像饱和度的均值和方差形成数据集D,作为特征参数。
Step2:选取初始聚类中心
本文将图像分为两类(雾天与非雾天),则从数据集D中随机选取两个元素,作为两个簇的初始聚类中心。
Step3:计算相异度
相异度即每个元素到聚类中心的距离。本文分别计算比较剩余元素到两个初始聚类中心的欧式距离,将元素划归到距离较小的一簇。
Step4:重新计算聚类中心
根据聚类结果,取每个簇集中所有元素各自维度的算术平均值,计算得出新的聚类中心。按照新的聚类中心,将数据集中所有元素进行重新聚类。
Step5:循环迭代
循环以上步骤(Step4),直到所得聚类中心以及聚类结果收敛到不再变化。
Step6:输出结果[8?9]。
本文在训练阶段提取图像饱和度特征,计算其饱和度与方差,并运用K均值聚类算法得到雾天图像与非雾天图像的聚类中心。测试阶段,提取测试图像特征并计算测试对象与聚类中心的距离,并根据最小距离对相应图像进行划分。
4 实验结果与分析
为测试本文所运用的K均值聚类算法对视频图像中雾天识别的有效性,本文使用Intel[?]CoreTMi3?2310M CPU@2.10 GHz、RAM 4.00 GB的机器,在Matlab 7.1平台下编程设计了相关实验。
实验数据采用的是本文采集的图像数据1 000幅,每幅图像均手工标记有晴、阴、雨、雾、沙尘等天气现象。由于夜间的各种天气现象在图像中反映不够明显,因此本文随机抽取采集图像数据集中100幅白天图像(50幅雾天图像,50幅非雾天图像)作为训练样本,样本图像如图2所示。
4.1 图像特征提取
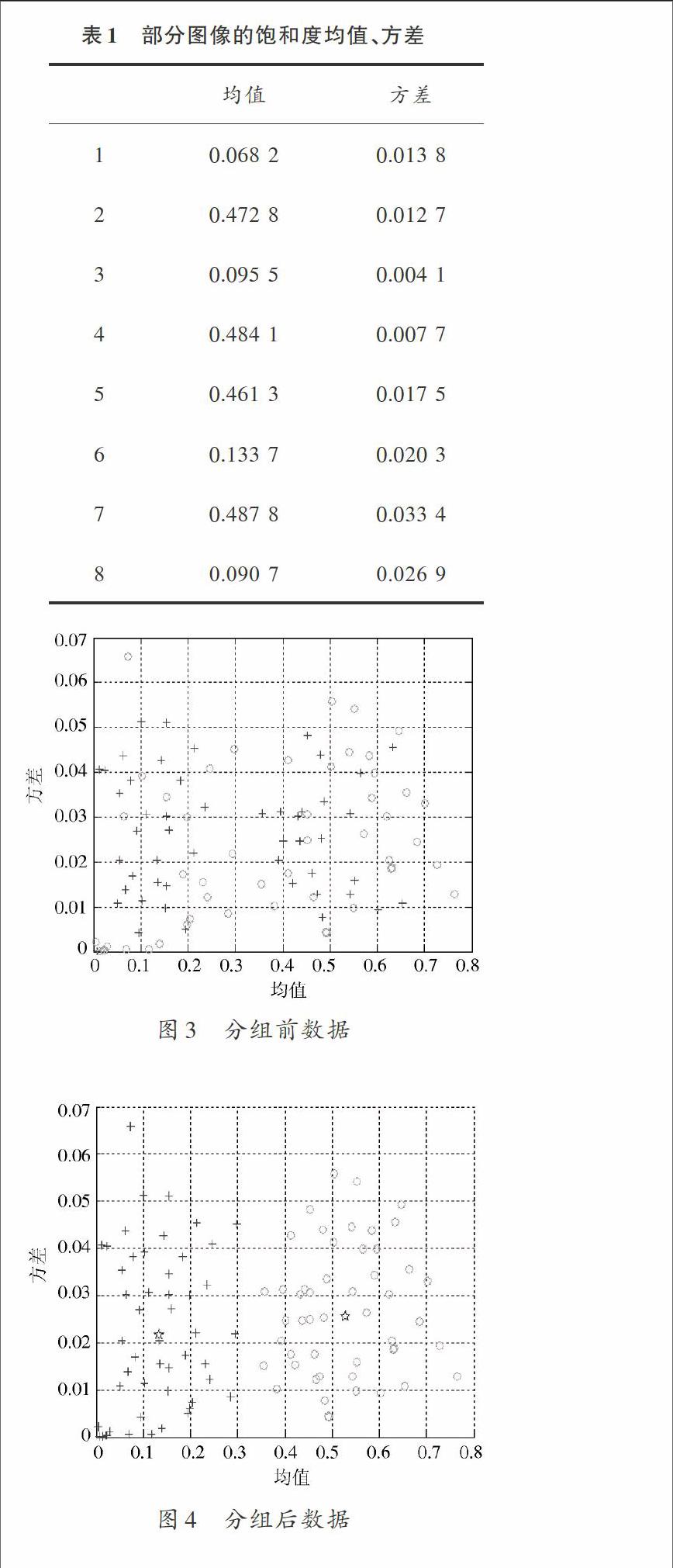
本文首先对所选取的100幅样本图像进行分析,将图像模式进行由RGB空间到HSV空间的转换,经计算得到图像饱和度的均值与方差,得到数据集D,结果如表1所示。
4.2 聚类结果
根据3.2节所讲到的K均值聚类算法流程,本文首先从数据集D中随机选取两个元素,作为两个簇的聚类中心,为了计算更有说服力,分类前两簇图像中均包含部分雾天图像并作以记录。分组前的图像特征数据分布如图2所示。其中符号“+”和“○”代表分类前的两簇数据。
在对样本图像数据进行聚类分析之后,结果如图4所示。其中符号“+”代表K均值聚类分析后的第一类图像(雾天图像),“○”分别代表K均值聚类分析后的第二类图像(非雾天图像)。符号“☆”代表计算得到的两个聚类中心:[0.131 3,0.021 5],[0.536 5,0.025 6]。
测试阶段本文又选取采集图像集中具有代表性的100幅图像进行测试,计算测试对象与聚类中心的欧式距离,并根据最小距离对相应对象进行划分。
实验结果表明,该算法能有效地实现视频图像数据中的雾天识别,识别正确率高达90%。但对雨天图像与雾天图像的区分不明显。
5 结 语
本文运用K 均值聚类算法实现了视频图像数据中的雾天识别。实验证明,该算法思想简便,并能高效地完成大规模数据的处理,达到了预期的效果。实验结果证明识别正确率达到90%以上。但是,本文仅限于区别雾天和非雾天两种天气现象,针对更为复杂的其他天气现象识别需要基于更为复杂的算法[10]进行进一步研究。因此,在未来的工作中,重点将在如下几个方面进行改善和拓展:视频图像中雨天与雾天的区分;雾天中轻雾、中雾、浓雾的分类;其他天气现象的分类。
参考文献
[1] 李骞,范茵,张璟,等.基于室外图像的天气现象识别方法[J].计算机应用,2011(6):1624?1627.
[2] ROSER M, MOOSMANN F. Classification of weather situations on single color images [C]// Proceedings of 2008 IEEE Intelligent Vehicles Symposium. Eindhoven: IEEE, 2008: 798?803.
[3] 郭佳,杨玲,吴可军,等.基于改进双色模型的视程障碍类天气现象识别[J].气象科技,2013(2):236?241.
[4] 宋晓建,杨玲.基于图像退化模型的天气现象识别[J].成都信息工程学院学报,2011(2):132?136.
[5] 宋洪军,陈阳舟,郜园园.基于交通视频的雾天检测与去雾方法研究[J].控制工程,2013(6):1156?1160.
[6] 秦襄培,郑贤中.Matlab图像处理宝典[M].北京:电子工业出版社,2011.
[7] 罗可,蔡碧野,吴一帆,等.数据挖掘中聚类的研究[J].计算机工程与应用,2003(20):182?184.
[8] MACQUEEN J B. Some methods for classification and analysis of multivariate observations [C]// Proceedings of 1967 the 5th Berkeley Symposium on Mathematical Statistics and Probability. Berkeley: [s.n.], 1967: 283?297.
[9] 徐义峰,陆春明,徐云青.一种改进的K均值聚类算法[J].计算机应用与软件,2008,25(3):275?277.
[10] 谢娟英,蒋帅,王春霞,等.一种改进的全局K?均值聚类算法[J].陕西师范大学学报,2010(2):18?22.
[11] NARASIMHAM S G, NAYAR S K. Contrast restoration of weather degraded images [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(6): 713?724.
[12] XU Guanlei, WANG Xiaotong, XU Xiaogang. Improved bi?dimensional empirical mode decomposition based on 2D assisted signals analysis and application [J]. IET Image Processing, 2011, 5(3): 205?221.
[13] 张驭龙,张健.基于数值天气预报预测电波雨衰的关键问题分析[J].现代电子技术,2014,37(1):27?30.
猜你喜欢
中国自动识别技术(2023年6期)2024-01-12
阅读(科学探秘)(2021年10期)2021-03-08
水上消防(2019年3期)2019-08-20
特别健康(2018年3期)2018-07-04
成都信息工程大学学报(2018年1期)2018-05-31
小学阅读指南·低年级版(2018年1期)2018-03-14
发明与创新(2016年26期)2016-08-22
家教世界·创新阅读(2016年5期)2016-05-14
电测与仪表(2016年6期)2016-04-11
交通科学与工程(2015年1期)2015-12-23
