
救援机器人技术综述
2015-12-02 03:14于振中蔡楷倜郑为凑
服装学报 2015年4期
于振中, 蔡楷倜, 刘 伟, 郑为凑
(江南大学轻工过程先进控制教育部重点实验室,江苏无锡214122)
近年来世界范围内的自然灾害、人为灾难频发,威胁着人们的生命财产安全,引起了全世界范围内的广泛关注。虽然人们对灾难的警觉和反应能力有所提高,但是灾难现场通常环境复杂,很多人往往死于不及时的救援,如果救援人员贸然进入现场实施救援,极易造成新的伤亡。所以灾难发生后第一时间若能获取现场情况、探明幸存者所在位置,对于之后实施进一步救援工作和减少人员伤亡具有重要的意义。
根据灾害发生的时间,救援可以分为灾前救援、灾时救援和灾后救援3个阶段。每个阶段的救援都面临着环境的复杂性和危险性。例如地震后的建筑物容易发生二次倒塌,救援人员无法深入进行侦查或救援。此时,救援机器人的参与可以起到非常重要的作用,能够有效地提高救援工作的效率和减少人员的伤亡[1]。
1 救援机器人国内外研究现状
21世纪以来,国内外对机器人技术的发展越来越重视。机器人技术被认为是对未来新兴产业发展具有重要意义的高技术之一。国内外产业界对机器人技术引领未来产业发展寄予厚望,机器人技术也是未来高技术、新兴产业发展的基础之一,对于国民经济和国防建设具有重要意义[2]。
在20世纪80年代以前就有人开始从事将机器人应用于灾害搜救工作的理论研究。1995年发生的日本神户、大阪的大地震及其之后发生在美国俄克拉荷马州的阿尔弗德联邦大楼爆炸案揭开了救援机器人技术研究的序幕。机器人在“9·11”事件中的成功应用,引起了对救援机器人的研究热潮。近年来,世界各国从安全战略的角度在研究救援机器人系统上投入大量精力,救援机器人也从理论和实验研究阶段向实用化方向发展,在突发事件的救援任务中发挥越来越重要的作用。
1.1 救援机器人构架
救援机器人的构架通常包括运动平台和延伸机构两个方面。运动平台主要是各类运动驱动机构,延伸机构主要是以机械臂为主的执行机构。救援机器人典型的运动结构主要有轮式[3-4]、腿式[5-6]、履带式和蛇形结构[7]等。轮式机器人结构简单、质量轻、移动平稳且机械效率高,但是通过壕沟、台阶等障碍物的能力差;腿式机器人相比轮式机器人的地形适应能力更强,能够适应各种非结构化环境,但是它的移动速度慢、控制难度大且机械结构复杂[8];蛇形结构的机器人是通过模仿生物蛇进行移动,其稳定性好、横截面积小,能在各种复杂的地形上行走,但是蛇形机器人过多的关节和自由度提高了机器人建模和控制的复杂程度。与以上几种结构的机器人相比,履带式机器人具有更多突出的优点:履带式机器人的支撑面积大,接地比压小,适合于松软或泥泞场地作业,且越野机动性能好;其转向半径小,可实现原地转向;履带支撑面有履齿,不易打滑,无论是在陆地还是在水中都可以发挥出较大的牵引力;带有子履带的机器人还可以像腿式机器人一样实现行走[9-10]。因此履带式机器人是目前在救援机器人上广泛采用的一种结构,且履带式机器人技术较为成熟。
国外已研制的典型的履带式救援机器人如图1所示。图1(a)为iRobot公司生产的商用机器人Packbot,“Packbot”意指“背包机器人”。该机器人除了具有两个主履带轮之外,还具有两个子履带轮,增强了机器人的攀爬能力。其上配备了可折叠的操作臂,这是目前比较经典的履带式救援机器人机构形式[11-12]。它的底盘装有GPS、电子指南针和温度探测仪,设计成方形的头部由一个相机、红外感应器和摄像头组成,可以随时观察周围的环境。Packbot机器人可以用于确认并拆除路边的炸弹以及其他危险装置,它同样可以用于执行其他任务,包括救援和侦察等。它十分坚固,即使从1.8 m的高度摔在硬质混凝土地面也能毫发无损。该机器人采用的Aware2.0版机器人智能软件,允许机器人自主操作,从而降低操作人员的工作负荷,提高态势感知能力。该款机器人是目前世界上经过战争环境测试的最成功的机器人之一。图1(b)也是iRobot公司的一款机器人,该机器人体积小、质量轻,能够在狭小的空间执行持久的监视和调查任务。它抗摔性能强,可以从4.6 m高处摔落至水泥地无任何损伤,潜水深度可达0.91 m;该机器人还内置4个摄像头和双向音频通信,它的坚固结构和通信技术可以为救援现场的环境侦察提供有力的帮助。
图1(c)是美国Vecna Robotics公司研制的战场救援机器人BEAR(Battlefield Extraction Assist Robot)。该机器人采用类人的外形,有两个可活动的手臂,采用履带和轮子作为移动平台可使其快速灵活移动。该款机器人可以适应不同地形,在崎岖路面,它可以采用“跪姿”,通过履带平稳行进,到了平坦地面,则可转换成轮式快速前行。它还可以利用腿部的两个独立踏板完成各种特殊的动作,依靠膝盖、臀部或足部的运动来改变身体高度。该机器人的液压手臂可抬起227 kg的重物长达1 h,其机械手则可以完成精细的任务,如进行紧急止血等手术作业。目前对BEAR机器人的操作还是采用远程控制,军队的工程师希望最终可以使用激光、雷达和声呐等传感器让机器人具备感知和应对周围环境的能力。
图1(d)为日本千叶工业大学开发的小型机器人Quince,它的体积只有玩具车大小,配备4套滚轮、踏板设备以及6个电机。该款机器人的机械手十分灵活,可以打开门把手,也可以运送食物或其他补给品。该机器人上还配有红外感应器和二氧化碳探测器,可以用来检测人体呼吸和体温情况,适合用于救援现场进行搜救工作。在日本福岛核电站发生核泄漏事故后,“Quince”机器人作为日本国内生产的唯一救援机器人进入了核反应堆厂房内部进行辐射检测和拍摄照片。
目前国内许多学者和研究机构也对救援机器人展开了相关研究。图2(a)所示的是哈尔滨工业大学研制的子母式煤矿救援机器人系统,母机器人采用单节履带式结构,具有4个主动摆腿。子机器人为4节4面履带式机器人,子机器人采用蛇形结构,每个单元用八条窄履带包覆在周围,由一个电机驱动,既减小机器人的质量和尺寸,又简化控制系统的设计。子机器人的头部单元还安装有摄像头、照明灯、超声传感器和各种气体传感器,可以探测周围环境并将信息传回控制中心[13]。还可采用一种未知环境下基于可视切线图的新型路径规划方法,使机器人具有较好的环境适应能力,满足其在未知环境下的运动要求。
中国矿业大学针对煤矿救援机器人机构和控制系统展开了许多研究,图2(b)是其研制的一类履带式救援机器人。该机器人装备有低照度摄像机、气体传感器和温度计等设备,能够探测现场环境,实时传回现场的瓦斯、CO、粉尘浓度以及现场图像等信息;还具有双向语音对讲功能,能够使救灾人员和受害者进行快速联络,对受困人员进行正确指挥;同时可以携带食品、水、药品、救护工具等物资进入救援现场。图2(c)、(d)分别为中国航天科工集团第四研究院探测与控制技术研究所研制的雪豹20和“排爆奇兵”排爆机器人。雪豹20的履带式结构使其具有很好的越野性能,能够适应草原、戈壁、碎石等多种地形环境,同时它的手臂关节有4个自由度,操作更加简单灵活。并且采用模块化设计,手臂等关键部件可以迅速更换,还可以根据要求安装作业器械或辅助工具,它的遥控终端人机界面友好,操控方便,降低了救援人员的操作难度。

图1 国外典型的履带式救援机器人Fig.1 Foreign typical crawler-type rescue robot
“排爆奇兵”机器人同样也采用履带式结构,使其能适应野外恶劣环境,三段履带的设计可以让机器人平稳地上下楼梯,跨越0.45 m高的障碍,实现全方位行走,具备较强的地形适应能力。它的操作臂同样可以灵活应用,通过更换专用手爪可以实现对不同形状目标的抓取,还能抓取20 kg的可疑物。它可以代替排爆人员搬运、转移爆炸可疑物品和其他危险品;也可以放置带线引爆装置,代替排爆人员处置或销毁爆炸物,避免不必要的人员伤亡;还可以代替安检人员勘测现场,实时传输现场图像。
纵观国内外的专家学者在机器人机械结构方面的研究现状,传统的履带式或可变形履带式移动平台仍然是救援机器人移动平台的最佳选择。
1.2 救援机器人地形自适应技术
为了提高机器人对复杂地形的自适应能力,通常采用增加自由度的方法,但是这样也增加了操作人员的操作负担。一个有效的方法是提高机器人的自主性,使其根据现场地形信息可以自主地做出一些决策,从而减轻操作者的工作负担。
首先机器人要获取周围环境信息,机器人通常是将各类传感器对环境的感知转化成自身对环境的认知,从中获取位置和环境信息,从而服务于机器人的运动导航。机器人对识别周围环境所采用的传感器通常有基于激光、超声波的有源测距传感器和基于视觉的传感器。有源测距传感器是当今机器人技术中最流行的传感器,它能直接测量机器人到邻近物体的距离,可以很好地识别出障碍并完成避障。并由测距传感器提供的局部信息通过算法转换到机器人的全局坐标中,完成环境的全局定位。采用视觉传感器则可以弥补激光测距等传感器在景象提取、障碍物检测、目标识别等方面的不足[14]。
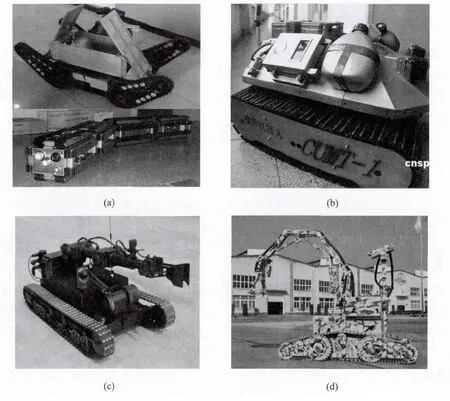
图2 国内典型的履带式救援机器人Fig.2 Domestic typical crawler-type rescue robot
目前在地形信息的自主控制算法中,以基于多个雷达传感器对地形切片然后重建三维地形、采用3D图像传感器建立三维模型和多传感器信息集成为主。但是,雷达传感器和3D图像传感器价格昂贵,多传感器信息集成算法复杂,且雷达传感器建立的地形信息缺乏真实度,限制了该方法的普及。2009年微软发布了Kinect传感器[15],这是一款廉价的RGB-D相机,通过内置的CMOS红外摄像机,无论周围环境的光照条件如何,都可以以30帧/s的速度生成景深图像流,实时再现周围环境。使用Kinect传感器可以实时建立机器人所到之处的三维地图,能够确定幸存者所在的空间位置并反馈给操作端,为实施进一步救援提供重要的参考。目前Smisek等研究人员已经对基于Kinect的实时3D建模和目标定位方法进行了诸多研究[16-18]。到目前为止,Kinect尚属于新生事物,从技术和算法上还不够成熟,需要进一步研究。
国内外许多学者在机器人复杂地形自适应技术上进行了很多研究。Okada等人所研究的是建立一个共享控制的救援机器人遥感操作系统,为了提高机器人的自主性,该系统基于3支激光雷达传感器,采用实时地形切片方式建立地形实时三维模型信息,从运动学角度分析经典摆腿式履带机器人适应地形的原理,基于以上信息采用模糊算法实现机器人自主翻越复杂地形任务,并且通过实验验证了其通过崎岖地形的能力[19]。Mourikis等人针对履带式机器人自主攀爬楼梯的任务,提出基于楼梯边缘实时估计的机器人地形自适应方法。该方法采用视觉系统识别楼梯,并采用卡尔曼滤波器估计机器人头部姿态。但是该算法没有考虑机器人车轮滑移、估计误差等造成的运动误差,有可能导致任务失败[20]。Al-Milli等人所研究的是从运动学和动力学角度预测履带和地面的接触力,在此基础上设计自主控制器,但仅限于履带与软地形的接触。此外,轮地摩擦、轮地接触强度等信息无法直接测量,因此该方法有待进一步改进[21]。
Chonnaparamutt等人针对结构可变的移动机器人,利用模糊控制器对机器人攀爬楼梯的环境进行仿真,分别为主履带轮和子履带轮建立了两个不同的自主控制器实现机器人的全自主探索任务。两个控制器均基于模糊算法:一个控制器根据机器人的重心位置控制机器人的主履带轮;另一个控制器根据机器人的角度控制机器人的子履带轮,实现机器人的自主运动[22]。
国内也有许多学者在进行这方面的研究。中科院沈阳自动化所研究了全地形移动机器人在不平坦地形中轮-地几何接触角的实时估计问题,全地形移动机器人的精确控制是一个具有挑战性的问题,与一般平坦地形下的移动机器人有很大差异,地形复杂性所带来的影响是不可忽略的。该方法的实现为移动机器人运动学的精确计算和自主导航控制奠定了基础[23]。东南大学王建等人以检测机器人自身姿态而非环境尺寸作为越障控制的基本依据,设计了多关节履带机器人的各种自主越障控制方法。首先以姿态航向参考系统测得机器人的姿态作为重要反馈量,采用稳定锥方法实时判定机器人越障过程中的倾翻稳定性。在此基础上以机器人姿态为反馈,并结合机器人关节位置和驱动电流,设计了典型障碍下的自主越障控制动作规划,实际环境测试的结果表明该方法具有对障碍物具体尺寸依赖性小、实用性强的特点[24]。哈尔滨工业大学王伟东等人提出的基于质心坐标公式和机器人运动学的质心运动学模型,通过此模型获取机器人在越障过程中质心变化的情况,从而分析机器人越障性能,自主规划机器人越障动作。并且建立稳定裕度角及俯仰角度与障碍物高度关系的求解方法,在此基础上进行基于最大裕度的越障动作规划[25]。
救援机器人对复杂地形的自适应能力始终是机器人研究领域中的难点和重点,一个实用可靠的控制算法需要许多人进行反复实验验证,相信通过国内外专家学者的研究,将会不断提升救援机器人的性能。
2 救援机器人研究的方向
自“9·11”以来,救援机器人的研究迅猛发展,解决了一系列困扰救援机器人发展的难题,机器人逐渐由半自主向全自主方向发展。当前救援机器人的研究热点主要有优化机器人的结构、提高救援机器人的智能化程度和群体机器人的研究等。
2.1 机器人结构
随着机器人技术的发展和复杂地形的要求,机器人的运动平台已不能满足于传统结构,需要有一定改进。如自适应腿式机器人[26],通过冗余的机械设计和控制算法,即使部分腿结构失效,仍然可以执行动作,完成任务。目前应用较为成熟的腿式机器人有美国波士顿动力学工程公司(Boston Dynamics)专门为美国军队研制的机器狗(Bigdog),它可以替士兵背负几百磅重的工具,其4条强壮的机械腿能让它保持很好的稳定性,并且它的头部装有摄像头和激光扫描仪,能为灾难救援工作提供强有力的帮助。同时机器人运动平台也不再只涉及某种单一的运动机械结构,可以融合各类运动结构的特点,设计出一种综合的机械结构。如轮履复合机器人[27],采用变体轮技术,使机器人移动平台可以在轮式和履带式之间进行切换,以适应不同地形,提高了地形适应能力。还有轮腿混合[28]、轮臂混合[29]等结构的机器人。但是过于复杂的机器人结构会增加救援人员在现场的操作负担,反而可能影响救援效果。
可以看出,救援机器人机械结构的设计至关重要,不仅影响到救援现场的运动效果,还关系到之后对其进行控制的难易程度。因此研究兼具地形适应能力和操作能力或者二者相互增强的机器人机构模型,是救援机器人系统重要的研究发展方向。
2.2 机器人智能化
当前救援机器人的人工智能水平低下,机器人在复杂地形环境下很难完全自主地完成救援任务。目前主要还是依靠人工操作的方式操控机器人进行救援任务。操作者负担较重,救援效率较低。随着传感器技术、信息技术、人工智能技术的发展,采用人机智能结合的共享控制的遥感操作控制方式能较大程度上提高系统的救援效率。在共享控制系统中,提高机器人的智能化程度始终是该类系统研究的重要方向。救援现场地形环境复杂,如果机器人能够自主穿越复杂地形,如自主爬楼梯、越过不规则障碍物等,操作者只需要进行有限的高级决策,将会大大降低操作者的工作负担。
在提高机器人智能化方面,实用的传感器技术和智能控制算法同等重要。基于激光雷达或3D深度图像传感器的控制方法算法复杂,实时性差,硬件成本昂贵。微软公司研发的Kinect传感器能弥补传统设备的一些缺点但其控制技术还不够成熟。提高救援机器人的智能化程度始终是一个重要的研究发展方向。
2.3 群体机器人
随着机器人的应用方式由部件式单元应用向系统式应用方向发展,群体机器人系统的研究也受到了许多学者的关注。群体机器人相比单机器人具有更优越的性能:相互协调的n个机器人系统的能力可以远大于单个机器人系统的n倍,群体机器人还可以实现单个机器人系统无法实现的复杂任务;使用群体机器人可以大大节约时间,提高效率;群体机器人系统的平行性和冗余性可以提高系统的柔性和鲁棒性[30-31]。一旦发生自然灾害,受灾的面积通常很大,如果将群体救援机器人应用于救援工作中,将会发挥出比单个机器人更好的搜救效果
群体机器人的研究也是机器人技术中的一个共性技术,很多研究人员从人类社会以及其他动物的社会性、组织性得到灵感,进行群体机器人系统的研究[32]。
3 结语
防灾、减灾和救灾是每个国家公共安全的重要组成部分。在面对危险恶劣的救援现场时,救援机器人可以代替、协助救援人员在现场进行作业。救援机器人不仅可以应用于灾害救援、消防、公安等领域,同时在国防、军事等方面也有良好的应用前景。救援机器人的研发具有深远的影响和现实意义,目前救援机器人技术还有许多关键性技术问题尚待解决。救援机器人技术是国家发展迫切需要的核心技术之一,将在国民经济和国家安全中起着重要作用和重大战略意义。
[1]刘金国,王越超,李斌,等.灾难救援机器人研究现状、关键性能及展望[J].机械工程学报,2006,42(12):1-12.LIU Jinguo,WANG Yuechao,LI Bin,et al.Current research,key performances and future development of search and rescue robot[J].China Journal of Mechanical Engineering,2006,42(12):1-12.(in Chinese)
[2]谭民,王硕.机器人技术研究进展[J].自动化学报,2013,39(7):963-972.TAN Min,WANG Shuo.Research progress of robotice[J].Acta Automatica Sinica,2013,39(7):963-972.(in Chinese)
[3]Ortigoza R S,Aranda M M,Ortigoza G S,et al.Wheeled mobile robots:a review[J].Latin America Transactions,2012,10(6):2209-2217.
[4]LIU Shuang,SUN Dong.Minimizing energy consumption of wheeled mobile robots via optimal motion planning[J].Mechatronics,2014,19(2):401-411.
[5]Raibert M,Blankespoor K,Nelson G,et al.BigDog,the rough-terrain quadruped robot[C]//Proceedings of the 17th World Congress,The International Federation of Automatic Control.Korea:[s.n.],2008:10822-10825.
[6]曾翔宇,鄂明成,李冬冬,等.沟壑类非连续地形下的四足机器人运动控制[J].机器人,2011,33(6):700-705.ZENG Xiangyu,Mingcheng E,LI Dongdong,et al.Quadruped robot walking control on trench-like noncontinuous terrain[J].Robot,2011,33(6):700-705.(in Chinese)
[7]王智锋,马书根,李斌,等.基于能量的蛇形机器人蜿蜒运动控制方法的仿真与实验研究[J].自动化学报,2011,37(5):604-614.WANG Zhifeng,MA Shugen,LI Bin,et al.Simulation and experimental study of an energy-based control method for the serpentine locomotion of a snake-like robot[J].Acta Automatica Sinica,2011,37(5):604-614.(in Chinese)
[8]钱善华,葛世荣,王永胜,等.救灾机器人的研究现状与煤矿救灾的应用[J].机器人,2006,28(3):350-354.QIAN Shanhua,GE Shirong,WANG Yongsheng,et al.Research status of the disaster rescue robot and its applications to the mine rescue[J].Robot,2006,28(3):350-354.(in Chinese)
[9]吉洋,霍光青.履带式移动机器人研究现状[J].林业机械与木工设备,2012,40(10):7-10.JI Yang,HUO Guangqing.Research status of track-type mobile robots[J].Forestry Machinery and Woodworking Equipment,2012,40(10):7-10.(in Chinese)
[10]Tomoya Inoue,Takuya Shiosawa,Ken Takagi.Dynamic analysis of motion of crawler-type remotely operated vehicles[J].IEEE Journal of Oceanic Engineering,2013,38(2):375-382.
[11]Frost T,Norman C P,Yamauchi S,et al.Derived performance metrics and measurements compared to field experience for the packbot[EB/OL].Proceedings of the 2002 PERMIS Workshop,2002.http://citeseerx.ist.psu.edu/showciting?cid=4538267
[12]Yamauch B.Packbot:a versatile platform for military robotics[J].Unmanned Ground Vehicle Technology,2004,5422:228-237.
[13]刘罡,刘玉斌,赵杰,等.基于可视切线图的新型煤矿救援机器人路径规划[J].吉林大学学报:工学版,2011,4(41):1107-1112.LIU Gang,LIU Yubin,ZHAO Jie,et al.Path planning for a new mine rescue robot base on visual tangent graphs[J].Journal of Jilin University:Engineering and Technology Editon,2011,4(41):1107-1112.(in Chinese)
[14]李宇波,朱效洲,张辉,等.救援机器人技术研究进展[J].机器人技术及应用,2011(6):6-12.LI Yubo,ZHU Xiaozhou,ZHANG Hui,et al.Research progress of rescue robot[J].Robot Technique and Applicaion,2011(6):6-12.(in Chinese)
[15]Leyvand T,Meekhof C,Wei Y C.Kinect identity:technology and experience[J].Computer,2011,44(4):94-96.
[16]Smisek J,Jancosek M,Pajdla T.3D with kinect[C]//IEEE International Conference on Computer Vision Workshops.Barcelona,Spain:[s.n.],2011:1154-1160.
[17]Joshua Fabian,Tyler Young,James C Peyton Jones,et al,Integrating the microsoft kinect with simulink:real-time object tracking example[J].Mechatronics,2014,19(1):249-257.
[18]Joshua Fabian,Garrett M Clayton.Error analysis for visual odometry on indoor,wheeled mobile robots with 3-D sensors[J].Mechatronics,2014,19(6):1896-1906.
[19]Okada Y,Nagatani K J,Yoshida K,et al.Shared autonomy system for tracked vehicles on rough terrain based on continuous threedimensional terrain scanning[J].Journal of Field Robotics,2011,28(6):875-893.
[20]Mourikis I,Trawny N,Roumeliotis S I,et al.Autonomous stair climbing for tracked vehicles[J].The International Journal of Robotics Research,2007,26(7):737-758.
[21]Al-Milli S,Seneviratne L D,Althoefer K.Track-terrain modelling and traversability prediction for tracked vehicles on soft terrain[J].Journal of Terramechanics,2010,47(3):151-160.
[22]Chonnaparamutt W,Birk A.A fuzzy controller for autonomous negotiation of stairs by a mobile robot with adjustable tracks[C]//RoboCup 2007:Robot WorldCup XI,Lecture Notes in Artificial Intelligence.Berlin:Springer-Verlag,2007:196-207.
[23]宋小康,王越超,谈大龙,等.全地形移动机器人轮-地几何接触角估计[J].自动化学报,2008,34(7):778-783.SONG Xiaokang,WANG Chaoyue,TAN Dalong,et al.Wheel-terrain geometric contact angle estimation of all-terrain mobile robots[J].Acta Automatica Sinica,2008,34(7):778-783.(in Chinese)
[24]王建,谈英姿,许映秋.基于姿态的多关节履带机器人越障控制[J].东南大学学报:自然科学版,2011,41(增刊):160-167.WANG Jian,TAN Yingzi,XU Yingqiu.Obstacle-navigation control method of multi-joint tracked robot based on robot pose[J].Jorunal of Southeast University:National Science Editon,2011,41(Supl):160-167.(in Chinese)
[25]王伟东,孔民秀,杜志江.腿履复合机器人自主越障分析与动作规划[J].哈尔滨工业大学学报,2009,41(5):30-33.WANG Weidong,KONG Minxiu,DU Zhijiang.Analysis and motion planning for obstacle negotiation of tracked mobile robot[J].Journal of Harbin Institute of Technology,2009,41(5):30-33.(in Chinese)
[26]Jakimovski B,Meyer B,Maehle E.Self-reconfiguring hexapod robot OSCAR using organically inspired approaches and innovative robot leg amputation mechanism[C]//Proceedings of International Conference on Automation,Robotics and Control Systems,ARCS-09.Orlando,Florida:ISRST,2009:62-69.
[27]刘宗豪,侍才洪,康少华,等.多姿态轮履复合机器人移动机构设计与分析[J].机械设计与制造,2014(4):175-181.LIU Zonghao,SHI Caihong,KANG Shaohua,et al.Design and analysis of the pose-varied wheel-trcaked robot travel mechanism[J].Machinery Design and Manufacture,2014(4):175-181.(in Chinese)
[28]Yoo-Seok Kim,Gwang-Pil Jung,Haan Kim,et al.Wheel transformer:a wheel-leg hybrid robot with passive transformable wheels[J].Robotics,2014,30(6):1487-1498.
[29]Hiroaki Fukushima,Masatoshi Kakue,Kazuyuki Kon,et al.Transformation control to an inverted pendulum for a mobile robot with wheel-arms using partial linearization and polytopic model set[J].Robotics,2013,29(3):774-783.
[30]刘祚时,张海英,林桂娟.群体机器人研究的现状和发展[J].机器人技术与应用,2004(1):38-41.LIU Zuoshi,ZHANG Haiying,LIN Guijuan.Current research and development of multi-robots[J].Robot Technique and Applicaion,2004(1):38-41.(in Chinese)
[31]Gautam A,Mohan S.A review of research in multi-robot systems[C]//2012 7th IEEE International Conference on.Chennai:IEEE,2012:1-5.
[32]董晓坡,王绪本.救援机器人的发展及其在灾害救援中的应用[J].防灾减灾工程学报,2007(1):112-117.DONG Xiaopo,WANG Xuben.Development of rescue robot technology and its application in disaster[J].Journal of Disaster Prevention and Mitigation Engineering,2007(1):112-117.(in Chinese)
猜你喜欢
哈哈画报(2022年5期)2022-07-11
纺织科学研究(2021年1期)2021-12-03
学生天地(2020年1期)2020-08-25
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
数学大王·低年级(2015年6期)2015-07-09
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
