
L波段探空雷达天控系统故障分析与处理
2015-11-30 08:20刘永亮黎美宏
装备制造技术 2015年9期
刘永亮,黎美宏,於 莹
(1.广西区气象技术装备中心,广西 南宁530022;2.南宁市气象局,广西 南宁 530022)
GFE(L)1型雷达所跟踪的目标是有源的,故称二次雷达,其频率属于L波段范围,亦称L波段探空雷达。该雷达与电子探空仪配合,测定高空的风向、风速、气温、气压和湿度5个气象要素,为气象台站提供风场信息等气象资料。全国120部L波段探空雷达投入业务运行以来,经过多年的维修保障工作实践,雷达技术保障人员在维护维修方面积累了大量实践经验,安克武、任雍等[1-6]详细介绍雷达常见故障分析及处理方法。天控分系统作为探空雷达的重要组成部分,其故障率也相对较高。本文结合多年来探空雷达维修保障的实践经验,分析天控分系统典型故障,总结故障处理方法。
1 天控系统基本原理
天控系统根据和差环所获取的角误差信号或手动信号完成对天线的控制,以达到跟踪探空仪的目的。其工作方式有手动和自动两种。在手动方式时,由人工操纵手动盒,天线可以上、下、左、右转动,当示波器上的四条亮线两两对齐时,即对准了探空仪。而在自动方式时,由软、硬件结合的控制单元将调制在载波上的角误差信号解调下来,使天线朝着误差减小的方向运动,完成自动跟踪的功能[7]。其框图如图1所示。

图1 天控系统基本原理框图
在手动状态时,终端分系统采样到手控盒的手控电压,将其转换成代表速度的数字信号,通过串口传给微处理器,它接收后再通过D/A转换变成相应的速度电平送给驱动器,驱动电机带动天线转动。
在自动工作状态时,检波电路将调制在800 kHz副载波上的角误差信号解调出来,经放大后送给A/D转换器将其转变成数字量,微处理器将这个数字量滤波、平滑后,再将其通过D/A转换器转换成代表角误差大小、方向的速度电压,再经直流放大器放大后送给驱动器驱动天线朝着减小误差的方向转动。
此外,微处理器通过扩展并口输出50 Hz的程序方波,其作用是按5ms的时间间隔依次导通和差箱中的PIN开关管,将差环获取的角误差信号调制至和信号上,即完成相当于换相扫描的功能。但由于TTL逻辑电平不能驱动PIN开关管,因此在该分系统中设置了4路完全相同的驱动电路。
同时扩展并口输出的TTL逻辑电平的程序方波还送到显示分系统,作为x扫描,完成测角状态四条亮线的显示。该分系统的印制插板代号为11-6,置于室内的主控箱内。
2 天控系统信号流程
天控板收到自动或手动天线控制信号后,将该控制信号解析和转换后送给交流伺服驱动器,驱动电机的编码器收到交流伺服驱动器的控制信号后控制驱动电机驱动谐波齿轮箱转动,谐波齿轮箱带动天线转动,同时也带动同步轮系转动,同步轮系带动粗同步机和精同步机同时转动,同步机的角度信号经过角码转换板解码后,送给终端板,终端板将信号通过RS232串口送给终端计算机用于软件显示天线的角码数据。
方位和俯仰的驱动信号或角码信号的信号流程基本相同,唯一的区别在于俯仰的信号经过汇流环,而方位的信号不经过汇流环,信号流程如图2所示。
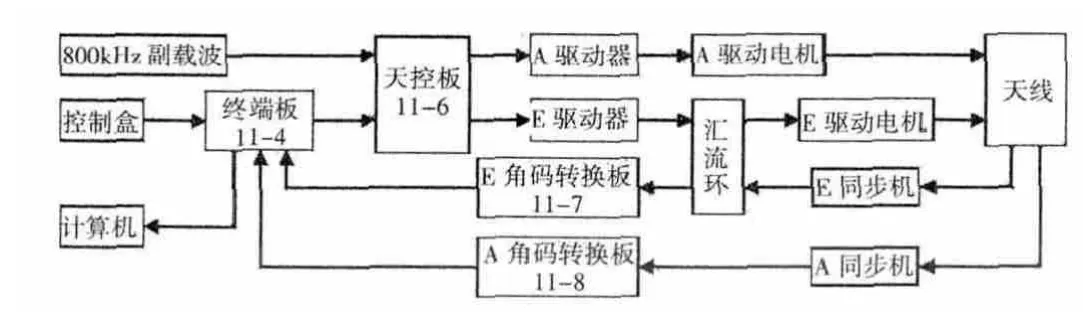
图2 天控系统信号流程
在该系统中,带动天线转动的是交流电机,而与之配套的则是交流伺服驱动器,这种驱动器的报警功能较强,当出现接线错误、发生电器或机械故障时,驱动器会报警,此时,驱动箱面板的报警指示灯亮红灯,打开驱动箱的上盖板,观察驱动器面板的指示窗显示的报警号“Err××”,对照表1,可以找出故障原因,从而有针对性的排除故障。

表1 交流驱动器报警码含义表
方位和俯仰各有1个交流驱动器,可互换,但需更改驱动器的设置。如需更换驱动器时,要确认备份的驱动器设置在方位还是俯仰状态。
2.1 更换俯仰交流驱动器
如有时备件是方位驱动器,要换到仰角上使用,需对部分设置进行更改,一是增加仰角限位功能,将04设置为0.二是对电机转向进行更改,将51设置为1。具体方法和步骤如下。
2.1.1 限位设置步骤
接通驱动器电源,按SET按钮,按MODE按钮,此时显示PR-r00.按左、上、下按钮选择需要的参数号码,这里选04,按SET按钮,用上、下按钮改变数值,将1改为0.按SET按钮,按MODE按钮,按SET按钮,出现EEP —,按住向上按钮(约3秒钟)显示屏上的短横杠逐渐增加,开始写入,瞬间会显示Start,完成后显示Finish.关掉电源后再接通电源,写入内容生效。
2.1.2 转向设置步骤
接通驱动器电源,按SET按钮,按MODE按钮,此时显示PR-r00.按左、上、下按钮选择需要的参数号码,这里选51,按SET按钮,用上、下按钮改变数值,将0改为1.按SET按钮,按MODE按钮,按SET按钮,出现EEP —,按住向上按钮(约3秒钟)显示屏上的短横杠逐渐增加,开始写入,瞬间会显示Start,完成后显示Finish.关掉电源后再接通电源,写入内容生效。
2.2 更换方位交流驱动器
如原先驱动器设置的是仰角状态,需将仰角调整为方位,只是将04设置为1,步骤与2.1.1限位设置步骤相同。
手动转动方位,看天线实际转动方向与手动控制方向是否一致,如果不一致,需将51设置为0,步骤与2.1.2转向设置步骤相同。如果一致,则不需要更改设置。每部雷达情况不尽相同,51设置是否需要更改,主要取决于天线实际转动方向与手动控制方向是否一致,不能一概而论。
3 故障检修实例
3.1 汇流环故障
故障现象:在雷达运行过程中,雷达转到某个方位时,仰角告警,天线仰角不能转动,驱动分机的“E告警”红灯亮,“E准备好”绿灯不亮。
主要检修过程:打开驱动分机的盖板,可以看到仰角驱动器显示22#(大部分情况下都是22#)告警,出现这种情况主要是汇流环长期使用以后上面出现一些污垢(第14—24环),刷架与汇流环接触不好,导致驱动电机的编码器连接出错。拆下汇流环刷架,用浓度95%以上的酒精擦洗汇流环及刷头,故障排除。
3.2 皮带断裂
故障现象:搬动控制盒的操纵杆摇动仰角,角度无变化,实际天线仰角未动。
主要检修过程:扳动天线仰角操纵杆,CRT上仰角角度不变,驱动箱俯仰无告警现象,通过摄像头观察发现实际天线仰角未动,在天线旁能听见电机空转声,打开俯仰驱动箱盖,发现传动皮带断裂,估计为传动皮带老化造成了断裂,更换皮带,故障排除。
3.3 连轴器打滑
故障现象:快速板动方位操纵杆,从方位角度上可看出角度变化滞后,天线突然停止时角度还有变化。
主要检修过程:从故障现象可以判断天线方位打滑。打开天线座驱动舱盖,取下方位驱动电机屏蔽罩,可以看出装在驱动电机轴和方位谐波轴上的连轴器有松动现象,使得电机在转动时连轴器打滑,用六角扳子把连轴器上的两只内六角螺钉重新紧固即可。
3.4 零点漂移
故障现象:在放球过程中,四条亮线参差不齐。
主要检修过程:四条亮线参差不齐,怀疑是由于11-6板仰角和方位的采样零点漂移所致。零点漂移主要是由于D14(LM358或LM158)运放的不稳定造成的,需要重新调整仰角和方位的零点,调整的方法如下(这里以仰角为例):在无信号状态下,将距离干预至1 km以外,用示波器探头(×1档)测量11-6板上D14(LM358或LM158)的第1脚(方位是第7脚)上的电压,应为0 V(示波器的幅度档调到0.1V),如果不是0 V,就要调整电位器RP2(方位是RP5),把电压调到0 V.
4 结束语
在L波段探空雷达使用过程中,各种器件使用一段时间后会出现老化、紧固件松动等,经常对雷达机械部分进行检查和维修是预防和减少故障发生的重要途径。雷达技术保障人员应该熟练掌握雷达工作原理、信号流程及各种器件对应的检测方法,熟练使用三相万用表、示波器等检查仪器对关键点参数进行测量,在排除雷达故障过程中才能胸有成竹、得心应手。
[1]安克武,刘 涛,于 晓,等.L波段气象探空雷达角度自动跟踪系统故障分析[J].现代雷达,2012,34(1):14-19.
[2]任 雍,汪 波,周惠珊.L波段探空雷达天馈系统故障分析与处理[J].信息通信,2014,139(7):277-279.
[3]黄 荟,唐明松,卢雪勤.百色站L波段雷达故障个例分析[J].气象研究与应用,2012,33(z1):228-229.
[4]马玉英.关于探空L波段雷达维护维修技巧[J].农业与技术,2013,33(7):189,194.
[5]崔炳俭,董卫红,崔 灿,等.浅谈L波段气象探空雷达常见故障的维护维修方法[J].大众科技,2010,128(4):101-102,81.
[6]李艳君,纪家伦,秦聪敏,等.浅析高空观测中气球过顶丢球的处理[J].自然科学,2010,35(14):1.
[7]中国气象局监测网络司.L波段高空气象探测系统设备维护、维修手册[M].北京:中国气象局,2004.
猜你喜欢
成都信息工程大学学报(2021年3期)2021-11-22
气象与环境科学(2021年3期)2021-07-14
北华大学学报(自然科学版)(2021年3期)2021-07-13
电脑爱好者(2020年6期)2020-05-26
初中生世界·九年级(2020年2期)2020-04-10
中国设备工程(2019年18期)2019-10-11
军民两用技术与产品(2019年7期)2019-07-26
北京航空航天大学学报(2017年5期)2017-11-23
科技视界(2016年15期)2016-06-30
红领巾·成长(2009年8期)2009-01-12
