
浮选槽液位控制研究
2015-11-28 07:54王威辽宁建筑职业学院辽宁辽阳111000
化工管理 2015年34期
王威(辽宁建筑职业学院,辽宁 辽阳 111000)
0 引言
浮选是选矿过程的一个关键环节,但由于浮选过程工艺机理复杂,具有分布参数、非线性和大时滞等特性,难以建立精确数学模型,许多建立在假设条件下的浮选过程机理模型由于其自身复杂性和其假设条件在工业系统中很难得到满足,因而其应用受到一定限制。目前,神经网络技术、模糊控制、粗糙集理论,蚁群算法等智能控制和优化算法的发展,极大的改善了常规控制方法的不足。因此,本文以鞍钢弓长岭选矿厂浮选过程为研究对象,以稳定浮选生产过程,稳定产品质量为目标,研究浮选过程中智能控制方法。
1 浮选槽液位控制系统流程工艺
目前大型选矿厂为了增加生产规模,一般将多个浮选槽串联起来,构成多槽浮选系统。本文以弓长岭选矿厂浮选系统为研究对象,该厂采用的浮选方法是阳离子反浮选方法,采用十二胺和盐酸按照一定配比作为浮选捕收剂,使无用矿物上浮,进入浮选泡沫中,然后选出。整个浮选系统由串联浮选槽、加药装置、加热及搅拌装置、给矿装置、中矿回收装置、扫选、磁选及尾矿分离装置组成。系统工艺框如图1 所示。
系统流程工艺如图2 所示。

图2 选矿工艺流程
系统输入是细筛下精矿矿浆,即给矿矿浆,它是前段初期选矿工艺的输出,给矿矿浆由给矿泵通过矿浆管道泵入到给矿箱中,同时按照一定浓度配比好的浮选药剂也通过控制机构送到给矿箱中。浮选药剂与给矿矿浆在给矿箱中混合,在高效矿浆搅拌槽中充分搅拌并加热后进入到浮选槽中,如果药剂量适当的话浮选槽便可以输出品位大于68%的精矿,并保持较高的精矿回收率。浮选槽输出的尾矿输入到扫选槽中进行进一步处理,扫选槽的输出一部分由中矿返回泵抽入到高效搅拌槽中重新加工,而另一部分进入到浮选后期工艺设备磁选机、脱水槽等设备中进行后期处理,处理结果为一部分当作最终尾矿排出,另一部分亦由中矿返回泵泵入到高效搅拌槽中进行回收利用。
2 浮选槽液位控制方案
要想很好的控制浮选槽液位,必须要求能够应用传感器准确的检测到浮选槽的液位,可是浮选槽液位的检测一直是困扰着工程界的难题,这是因为浮选槽中的矿浆比重经常发生变化,且矿浆比重分布不均匀,浮选泡沫厚度经常发生变化。传统的电容式液位计、吹气式液位计、浮子式液位变送器和和超声波都难以准确的检测到浮选槽的真实液位。弓长岭选矿厂先后采用过电容式液位计、吹气式液位计、浮子式液位变送器对浮选槽液位进行检测,但是这些检测方法有的误差大,有的无法直接将检测结果送入自动控制系统,只能做人工的液位指示。检测的效果一直不理想。
所以要解决浮选槽液位控制的问题,必须解决两个问题。一个是准确的液位检测方法;另一个是良好的控制算法。

图3 直接照射液面测量距离示意图
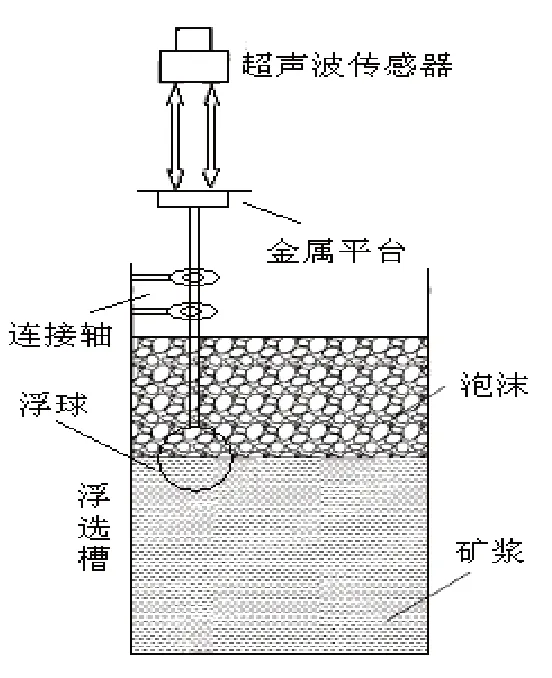
图4 浮选槽液位测量示意图

图5 浮选槽液位控制系统结构示意图
2.1 液位检测
由于浮选槽中矿浆分布不均匀,比重经常发生变化,传统的通过压力检测液位的方案是行不通的,所以本文决定采用超声波测量方法。但用传统的方法将一个超声波传感器在固定高度直接对浮选槽液面进行照射的话,由于浮选槽上层有泡沫存在,其泡沫层厚度经常发生变化,测量必然不准确。采用超声波传感器直接照射浮选槽液面测量浮选槽液位的示意图如图3所示。
从上面的测量方法得到启示,本文采用将浮球测量液位和超声波测量距离的方法结合起来,实现浮选槽液位的自动检测,并将检测结果直接送到自动控制系统中去。本文使用的方法示意图如图4 所示。
这里将一个金属平台顶在浮球上面,浮球通过连接轴固定在浮选槽上。浮球位置随着浮选槽液位的改变而改变。超声波传感器固定在一定高度,不直接照射浮选槽液面,而是照射金属平台,通过测量平台与超声波传感器之间的距离,间接测量浮选槽液位的变化。
2.2 液位控制
由图1 可知,浮选槽液位的调节主要是通过调节浮选槽出口流量来实现的。这里分别以每个浮选槽位对象,采取单独控制方案,每个浮选槽出口都安装有电动调节阀。并且使用西门子200PLC 来完成液位的控制。控制系统图如图5 所示。
系统控制原理如图6 所示:

图6 系统硬件结构
系统工作原理如下:控制器根据设定液位和反馈的实际液位的误差,通过控制算法控制电磁阀开度从而调节浮选槽液位。
猜你喜欢
探索科学(学术版)(2020年7期)2021-01-13
水利科学与寒区工程(2020年4期)2020-08-21
矿产综合利用(2020年1期)2020-07-24
中国特种设备安全(2019年9期)2019-12-03
科技视界(2019年26期)2019-11-26
江苏船舶(2018年3期)2018-12-07
石油化工建设(2018年1期)2018-07-10
世界有色金属(2018年9期)2018-01-31
世界有色金属(2018年9期)2018-01-31
山东工业技术(2017年3期)2017-03-16
