基于无线层析成像的室内监测定位算法研究*
2015-11-28 03:36张亚军王洪君
传感技术学报 2015年10期
张亚军,王洪君
(1.昌吉学院计算机工程系,新疆昌吉831100;2.山东大学信息科学与工程学院,济南250100)
基于无线层析成像的室内监测定位算法研究*
张亚军1,2,王洪君2*
(1.昌吉学院计算机工程系,新疆昌吉831100;2.山东大学信息科学与工程学院,济南250100)
随着物联网技术的快速发展,通过传感网络实现定位的技术成为研究热点。通过部署传感网络,收集传感器的接收信号强度指示,设计对应的定位模型从而达到高效定位的功能。但在室内复杂多径环境下,接收信号强度指示的值容易受到外界因素的干扰,其定位的准确度和精确度将会因为多径干扰而大幅下降。为此,提出基于RTI的室内成像技术,建立成像模型,设计两种定位算法并完成相关实验。实验结果表明,均值法定位算法具有较高的准确性和精确性。
物联网;传感网络监测;成像技术;多径干扰;无源定位
室内无源定位及追踪是通过对已知的无线传感网络信号分析,利用无线层析成像RTI(Radio To⁃mographic Imaging)原理[1-2],对室内未携带任何电子设备的无源目标运动行为进行探测感知、定位及追踪的一种新兴技术。与此对应的是目标携带有源标签(Active Radio Frequency Identification),通过有源信号实现的有源定位。此类方案是利用无线传感器组建传感网络WSNs(Wireless Sensor Net⁃works,)。在WSNs中,多个无线传感器被部署在监视区域内,单个目标或者多个目标在监视区域内随机游走,收集无线传感器的接收信号强度指示RSSI(Received Signal Strength Indication),通过算法处理,实现目标无源定位。
使用无线射频传感网络的无源定位(device-free localization or passive location)技术作为一个新兴的研究热点[3-4],已经引起研究者的极大兴趣。无源定位技术可以应用在工业领域检测入侵者,或在危急情况下帮助警察及消防人员跟踪室内的受困人员[1]。
实际上,已经存在多种不同的方案实现无源定位,例如视频定位追踪、红外线定位、超声波定位等技术。但是这些方案具有局限性,部署成本及定位精度都存在不同的问题。包含超宽频UWB(Ultra-Wide Band)和接收信号强度RSS(Received Signal Strength)在内的多种无线射频测量方案已经被提出,并且应用在室内人员的监测和定位[2,5-6]。本文提出的方案具有一定的优势:首先,在性价比方面,对比雷达无源探测定位方案,本方案成本低廉;其次,应用范围方面,比起视频监控、红外线探测等技术,本方案具有范围大,不受墙面阻挡等限制,具有穿墙功能;第三,本方案不侵犯个人隐私,比如嫌疑人被监视居住的情况下,在保护其个人隐私的情况下实现室内无源定位。
1 基于无线层析成像无源定位原理
1.1 线性模型
当无线传感节点通信时,无线信号穿过该网络的监视区域。在该区域内的目标能够对节点发射功率产生吸收、反射、衍射、散射等现象。基于RTI的定位系统的描述:由于目标在N个像素的监视区域内遮挡无线电功率衰减而产生的RN维的图像向量。由于像素是已知的,因此根据该区域内衰减区域,从而确定目标的位置[7-9]。
假设WSNs中有K个传感器节点,两两之间相互通信,则认为该网络中链接对总数量(为减少计算量,只考虑无向图)。根据信道传播模型,链接i在t时刻的值RSSi(t)是5部分组成,由式(1)表示:

其中Pi是发射功率;Si(t)是由于目标遮挡衰减信号损耗;Fi(t)是多径环境下的信号衰退损耗;Li是静态损耗,比如距离、天线类型等;vi(t)是测量噪声;以上各部分的单位都是分贝(dB).
信号的接收强度RSSi(t)。而Si(t)近似的认为是区域内每个像素的衰减的总和。由于区域内像素对任意链接衰减的贡献值大小不同,因此需要分配权重值wij。
Si(t)的数学形式如式(2):

其中wij是链接i中像素j的权重值,xj(t)是发生在t时刻像素j的衰减。如果链接没有“穿过”某像素,则权重wij的值为零,即可以删除该像素点,参考图1。
RSS从ta到tb时刻变化如下:

其中,噪声

像素j从ta到tb时刻的差异是



其中y∈RM,W∈RM×N,x∈RN,n∈RM是噪声向量。

图1 直射(LOS)链接示意图
1.2 权重模型设计和噪声n的选择
权重矩阵W在不同的文献中多种形式,W可以被分解[10]为

其中S是二进制选择矩阵,Ω是包含权重大小的实值矩阵,⊖代表Hadamard乘积。
针对该模型,有如下定义:d(i)代表第i个链接节点间的距离;d1(i,j)和d2(i,j)分别代表像素的中心到链接i的两个终端节点的距离;λ定义为链接i上两个节点作为的一个椭圆的焦距,如图2所示。

图2 权重模型
则式(7)可变换如下:

1.3 图像重建
由式(7)可知,此类方程属于不适定问题的求解,当从测量值估计图像的时候,通常最优的方案是最小二乘法。

利用梯度下降法可得

但实际上,根据文献[11]所述,式(11)的前提条件为条件数较小,而在本文中W不满足该条件。
为了解决本文的不适定问题,引入Tikhonov规则[11-14]。把Tikhonov规则引入公式最小二乘法之后,得到目标函数:

其中Q是Tikhonov矩阵。

由于∏是固定不变的,因此∏可以根据实验设置提前计算,从而在能够快速的成像,实现图像重建。
2 定位算法
2.1 直接定位法
直接定位法是依据式(15)直接成像之后,在图像上面最亮的点,即为估计出的位置,同时根据坐标和分辨率的映射关系,计算真实的位置坐标。本文中,坐标和分辨率的映射关系依据图2所示,映射原则:自下而上,自左向右。
2.2 均值定位法
均值定位法:在图像中找到最亮的点,然后在该点的邻域中进行降序排列,最后选取该序列中前3个值作为输入数据,使用式(16)计算横坐标均值:

其中,n取值范围为[3,8]的整数,如果n=3则与质心法相似。纵坐标的计算方式与横坐标一致。
2.3 判断
其判断是否和参考坐标一致的步骤:①利用定位算法解得坐标(x′i,y′i)中的x′i和y′i,分别减去对应序号的参考坐标(xi,yi)的 xi和 yi值;②假如和同时满足,则Nright加1,反之Nerror加1;③遍历所有16个定位点。由于本文在部署阶段说明(参考第3节),固定坐标是像素的中心坐标,因此在判别过程中假如是直接定位法Dth的取值为0.3 m,均值定位法Dth取值为0.424 m。
3 传感网络部署和数据收集
在6 m×6 m室内空间,部署28个传感器,相邻节点之间的距离是m,每个节点放置在距离地面0.95 m高的三脚架上,该区域分辨率设置为10×10。
整个网络是由TI公司生产的CC2530传感器组成。传感器节点在2.4 GHz频率下运行,遵循IEEE 802.15.4标准通信协议,设置一个汇聚节点监听网络状态,并通过USB口上传数据给笔记本电脑,根据算法处理,实时成像。为了避免网络通信拥塞,本网络采用令牌环控制通信,汇聚节点发送令牌环。每一个节点分配一个ID号,令牌环根据ID号控制通信顺序。当网络中某一个节点收到令牌环,则发射信号,其他节点收取信号。当节点收取时,检查是否收到令牌环,如果收到则发送信号,没有收到则等待接受下一个节点发送的信号。另外,为了提高系统的鲁棒性,设置固定时常,任意节点超过该时常未能收取到信号,则说明当前发射节点未能成功发送信号,则令牌环交给下一个节点。以此类推,收集每个节点发出的信号,作为成像的基础数据。
在部署该实验所需的基本步骤之后,运行该WSNs,由于开始阶段可能会受到外界不同环境等因素干扰,出现RSSI不稳定现象,因此需要运行大约3 min~5 min左右,系统可以达到稳定状态。此时按照部署要求收集离线阶段数据,利用算法计算式(14),实现成像。
3.1 实验结果
在试验区域内,随机选择16个位置,进行RSSI数据收集,具体数据见表1。
由表1的数据通过坐标显示如图3,通过式(17)计算定位准确率:

其中Nright代表和参考坐标一致的定位坐标个数,Nerror代表和参考坐标不一致的定位坐标个数。
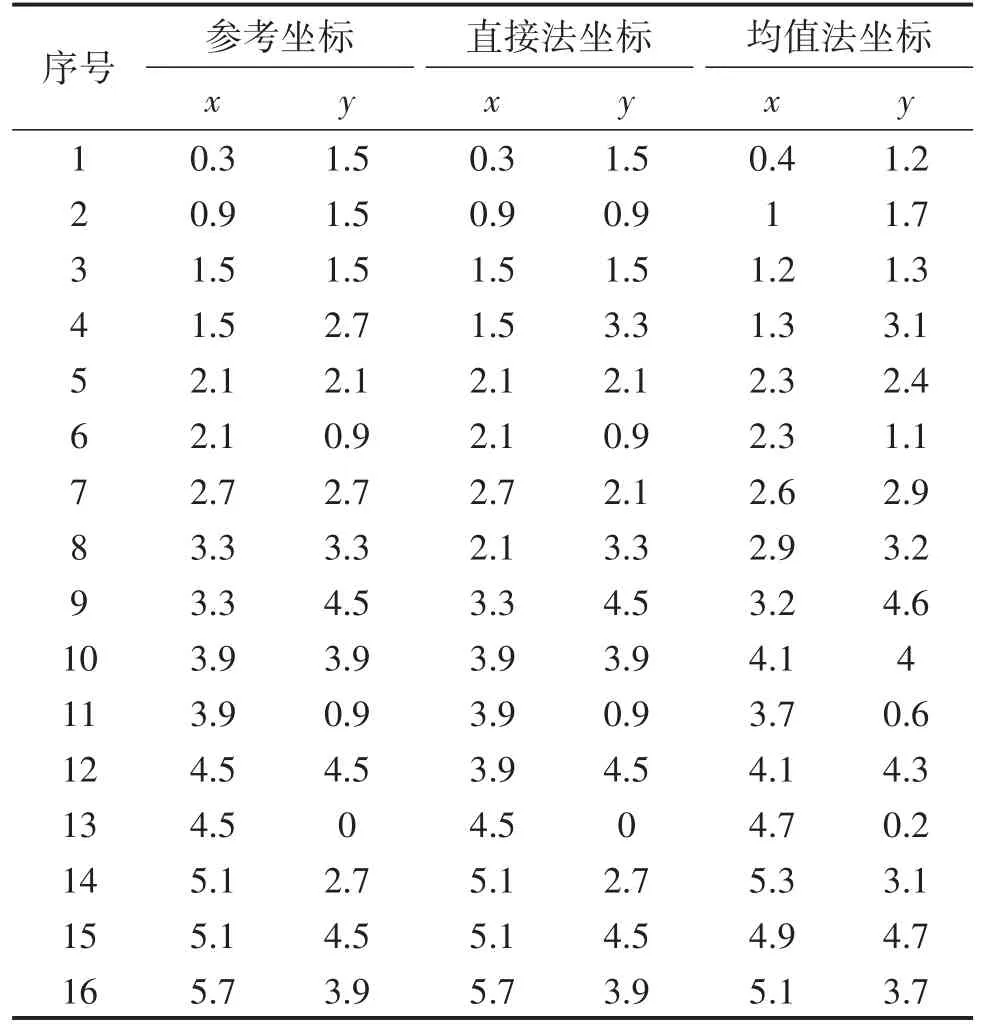
表1 16个参考点的定位数据 单位:m
3.2 实验分析
根据2.3节的判断步骤以及式(17),直接法和均值法定位准确率分别为68.75%和87.5%。
根据图3和图4分析可知,在本实验中,采用均值法定位时,第9个参考点时具有最小值0.015 7 m,更加贴近实际位置,且正确率87.5%,且均方根误差基本是0.3 m左右;而采用直接法定位时,虽然均方根值大部分为零,但是其准确性只有68.79%,均方根误差较大。
综合以上分析,本文的基于无线层析成像的室内均值定位算法具有较好的准确率且具有一定的普适性。
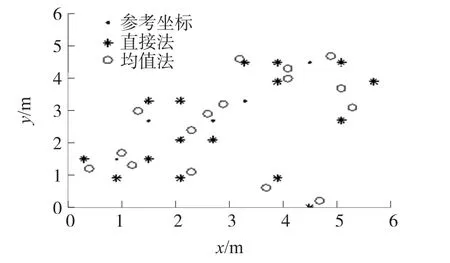
图3 定位图
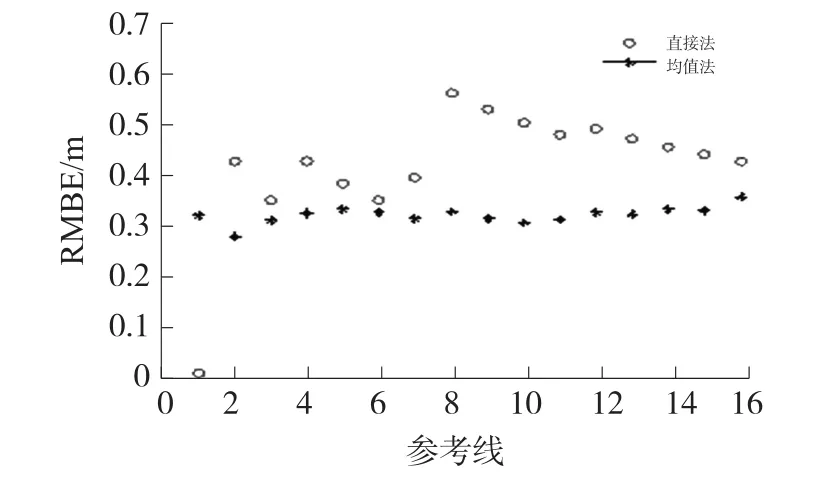
图4 RMSE比较
4 结束语
作为室内无源定位技术主要研究方向的无线传感器定位,其信号对周围环境的变化极其敏感,从而影响定位的精度。本文提出的基于无线层析成像的室内监测定位技术,在成像基础之上,对于室内的目标进行定位研究,并设计相关的实验,验证两种不同的定位算法。实验结果表明,均值定位法具有较高的准确性和精确性。
[1]Wilson J,Patwari N.See-Through Walls:Motion Tracking Using Variance-Based Radio Tomography Networks[J].IEEE Transac⁃tions on Mobile Computing,2011,10(5):612-621.
[2]Viani F,Rocca P,Benedetti M,et al.Electromagnetic Passive Lo⁃calization and Tracking of Moving Targets in a WSN-Infrastruc⁃tured Environment[J].Inverse Problems,2010,26(7):102-106.
[3]吴哲夫,周言.基于信道状态信息的无源被动定位[J].传感技术学报,2015,28(5):677-683.
[4]陈斌涛,刘任任,陈益强,等.动态环境中的WiFi指纹自适应室内定位方法[J].传感技术学报,2015,28(5):729-738.
[5]Liu Heng,Wang Zhenghuan,Bu Xiangyuan,et al.Image Recon⁃struction Algorithms for Radio Tomographic Imaging[C]//Pro⁃ceedings of the 2012 IEEE International Conference on Cyber Technology in Automation,Control and Intelligent Systems,2012:48-53.
[6]Kaltiokallio O,Bocca M,Patwari N.Follow@grandma:Long-Term Device-Free Localization for Residential Monitoring[C]// 7th IEEE International Workshop on Practical Issues in Building Sensor Network Applications,2012:991-998.
[7]Maurizio Bocca,Ossi Kaltiokallio,Neal Patwari,et al.Multiple Target Tracking with RF Sensor Networks[J].IEEE Transactions on Mobileomputing,201413(8):1787-1800.
[8]Teav K,Zhou Zhendong,Vucetic B.Triangular MIMO Relay Channels:Simultaneous Signal and Interference Alignment[J].IEEE Transactions on Vehicular Technology,2015,64(1):223-235.
[9]Teun H,Evert Woudenberg,Alexander G.Urban Objects Classifi⁃cation With an Experimental Acoustic Sensor Network[J].IEEE Sensors Journal,2015,15(5):3068-3075.
[10]Christopher R,Richard K,Owens Walker T.Radio Tomographyfor Roadside Surveillance[J].IEEE Journal of Selected Topics in Signal Processing,2014,8(1):66-79.
[11]王雷,李宏明,杜晓通.基于Tikhonov正则化的WSN多边定位算法研究[J].传感技术学报,2009,22(6):852-856.
[12]Chiu Chingyuih,Diego Dujovne.Experimental Characterization of Radio Tomographic Imaging Using Tikhonov’s Regularization[C]// Biennial Congress of Argentina(ARGENCON),2014:468-472.
[13]Wilson J,Patwari N.Radio Tomographic Imaging with Wirelesss Networks[J].IEEE Trans Mobile Computer,2010,9(5):621-632.
[14]Tropp J A,Wright S J.Computational Methods for Sparse Solution of Linear Inverse Problems[J].Appl&ComputMath,2010,98(6):948-958.
[15]Wang Ju,Fan Dingyi,Chen Xiaojiang,et al.LCS:Compressive Sensing Based Device-Free Localization for Multiple Targets in Sensor Networks[C]//Proceedings IEEE INFOCOM,2013:145-149.
[16]王雷,王晓鹏.WSNs节点定位不适定性的诊断与克服[J].仪器仪表学报,2012(4):850-856.

张亚军(1983-),男,讲师,博士研究生,研究方向为无源感知、传感网监测、信息融合,yajunzhang369@163.com;

王洪君(1963-),男,教授,博士,研究方向为物联网技术、无源感知、嵌入式系统,hjw@sdu.edu.cn。
Research of Indoor location Algorithm Based on Radio Tomographic Imaging*
ZHANG yajun1,2,WANG hongjun2*
(1.Department of computer Engineering,Changji University,Changji Xinjiang 831100,China;2.School of Information Science and Engineering,Shandong University,Ji’nan 250100,China)
Location technology of sensor is an emerging research hot topic with the rapid development of Internet of things technology.Through the deployment of sensor networks,the receiver signal strength indicator is collected,and the corresponding positioning model is designed to achieve the function of high efficiency.But in the indoor com⁃plex multipath environment,its accuracy and precision drop significantly because of multipathinterference.There⁃fore,this paper presents imaging technology based radio tomographic imaging,establishsthe imaging model,designs two algorithms and completes related experiments.Experiment results show that mean-value algorithm has higher accuracy and precision.
Internet of things;sensor networks monitor;imaging technology;multipath interference;passive location
TP393
A
1004-1699(2015)10-1558-05
��6135E;6250D;6210E
10.3969/j.issn.1004-1699.2015.10.024
项目来源:国家重大科学仪器设备开发专项项目(2012YQ20022407)
2015-05-22 修改日期:2015-06-29
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
电子制作(2019年12期)2019-07-16
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子制作(2018年23期)2018-12-26
北京航空航天大学学报(2017年6期)2017-11-23
互联网天地(2016年2期)2016-05-04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
中国舰船研究(2014年6期)2014-05-14