单轴槽式太阳能集热装置跟踪系统设计
2015-11-25 08:50张红光
河南科技 2015年18期
张红光
(宁夏伊品生物有限公司,宁夏 银川 750105)
本研究适用于宁夏银川地区的抛物槽式太阳能集热装置跟踪系统。该跟踪系统应用在夏季太阳能制冷空调系统中,目的是控制太阳能集热装置的运动,将太阳光实时地汇聚到集热管上,从而为制冷空调系统提供充足的热量,驱动空调制冷系统,达到制冷目的。
1 集热装置跟踪系统控制方法
1.1 单轴跟踪运动分析
单轴跟踪只能在一个方向上自动跟踪太阳位置,跟踪角τ的运动方程式为

式中:γ为太阳光线在观察地点上的投影线与正南方的夹角,规定正南方向夹角为0,向西为正、向东为负,它表示太阳光线在水平面上的投影偏离正南方的角度。γ的计算公式为

α为观察者地点O与太阳中心P的射线与其在观察地上投影线的夹角,它表示太阳高出水平面的角度。

从式(1)、(2)、(3)可以看出,跟踪角和安装地纬度φ、赤纬角δ及时角ω有关。以宁夏银川市为例,地理纬度φ为38.45°,时角ω以当地北京时间计算,ω=15(t-12),利用Matlab软件绘出6月1日、7月1日、8月1日、9月1日太阳跟踪角随时间变化曲线如下图1所示。从图中可以看出6-9期间跟踪角变化并不太一致,但跟踪角范围均在-90°~+90°之间,在正午时,跟踪角均为0,此刻太阳光线与聚光器平面垂直,光照强度大,跟踪效率最高[1];正午前后,跟踪角变化方向相反,变化最快;跟踪角曲线有突变点,可为6-9月期间设置跟踪起始和结束时间提供依据。

图1 跟踪角随时间变化曲线
1.2 间歇运动控制分析
太阳跟踪可以采用连续和间歇跟踪[2]两种方法跟踪太阳位置,进行运动控制。连续跟踪是根据太阳运行规律,每时每刻跟踪太阳位置的控制方法,这种控制方法太阳能集热装置跟踪角变化小,转轴运动速度低,跟踪角执行机构减速比大,因为实时跟踪太阳角度变化,因此跟踪准确。但同时,控制器、驱动机构要连续工作,就要消耗大量的电能。本文在综合考虑跟踪精度和系统耗能两个方面的基础上,采用间歇跟踪的控制方法,即每隔一定时间,集热装置调整跟踪角度一次,装置运动一次,间歇时间集热装置处于静止状态。这样的跟踪方法,可以简化跟踪系统控制,减少驱动机构驱动次数,增加了电机和驱动器寿命,降低了系统本身能耗。
本文将间隔时间取为10min,图2是某日t时刻和t+10min时刻跟踪角变化曲线,可以看出,相同等待时间下,跟踪角的变化量不大,设计相同等待时间方案可行。跟踪系统在t时刻跟踪到太阳方位角,然后静止等待10min,但太阳跟踪角是随时间变化的,所以到t+10min时刻跟踪角已经出现了偏差Δτ,Δτ=τt+10-τt。可见,间歇运动控制的特点是跟踪间歇时间越短,偏差将会越小,但这将会以牺牲间歇控制本身的优越性为代价。
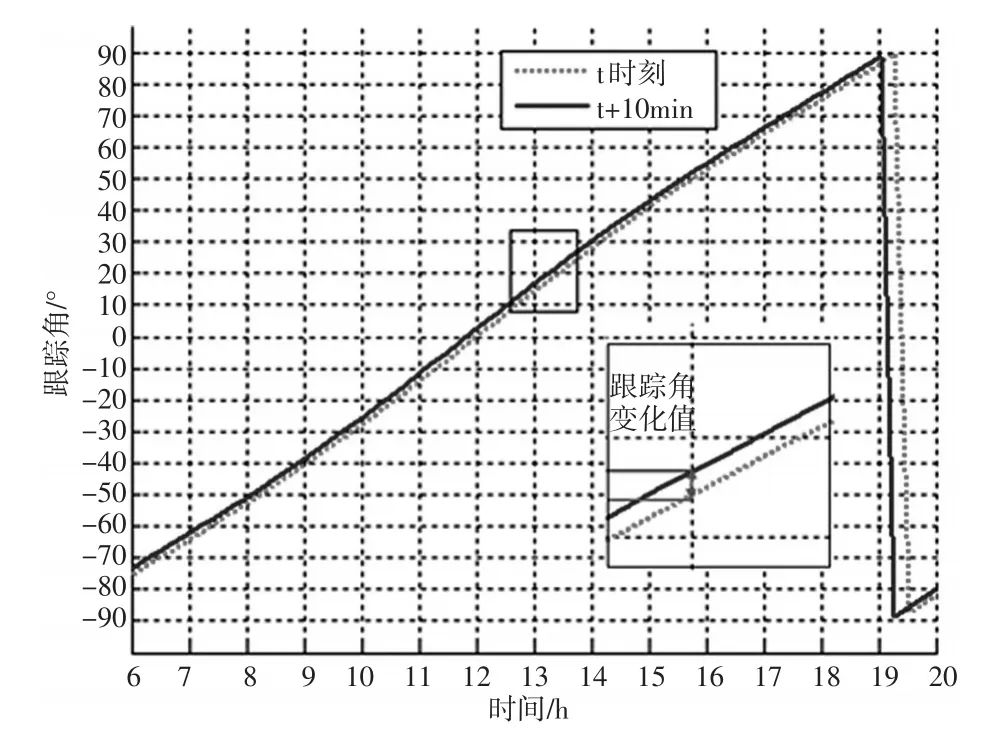
图2 间歇跟踪前后对比图
正午t时刻跟踪角τ=0,则10min后,若以北京时间计算ω,在9月1日这天,12:10分时,ω=15(12-12+10/60)=2.5°,φ=38.45°,日子数n为244,根据公式计算出跟踪角τt+10=2.94°。由于在正午前后跟踪角变化量最大,即在9月1日这天,间隔10min跟踪的跟踪角最大变化量为2.94°。
1.3 槽式太阳能集热装置控制方法
依据本研究依托的合同项目要求,设计的集热装置应用于银川地区6-9月期间,日照条件好,太阳辐射密度大,因此,在跟踪精度要求不高(集热器法线与太阳入射光线间的适时夹角不超过3°)的情况下就能获得较高的集热效率。跟踪系统采用间歇运动控制方法,跟踪角每10min变化角度不大,故集热装置对速度要求也不高,所以控制系统选择为视日运动轨迹式跟踪系统,如图3所示,该系统根据前文所述天文知识,每间隔10min计算单轴跟踪系统的跟踪角τ,将该值输入控制器,由控制器发出信号给执行器,控制集热装置按照跟踪角τ跟踪太阳位置。

图3 视日运动轨迹式跟踪系统控制方法
若将图中执行器选为步进电机,则步进电机就可以和数字信号直接进行开环控制,其位移量与输入脉冲数相对应,故不产生累积误差,可以组成结构简单而又具有一定精度的控制系统,可通过控制跟踪角计算误差和传动误差来提高跟踪精度。这种跟踪不需要对太阳实时位置进行监测,只需按照预先设定好的程序来控制执行机构的动作,所以跟踪系统人为干预小,成本低,运行可靠。跟踪系统整体构架如下:
2 单轴槽式太阳能集热装置
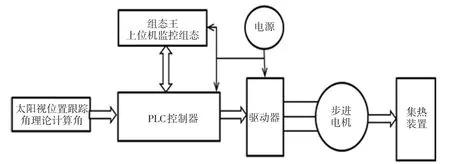
图4 跟踪系统整体构架
集热装置应用于太阳能制冷空调的跟踪系统,集热装置整体结构如下图5所示,它由聚光器、接收器和跟踪机构组成。这种集热装置的缺点是只能接收太阳直射过来光线,而对其他扩散的光线则无法吸收,为了使集热装置发挥最大作用,提高太阳光收集率,必须采用跟踪系统,由跟踪系统驱动集热器,利用抛物面聚光镜把直射阳光反射到接收器上,使集热器主光轴始终指向太阳,接收器收集太阳能后加热工作介质,使介质变成高温高压蒸汽或高温高压热气体,驱动制冷系统工作,达到以热制冷的目的。
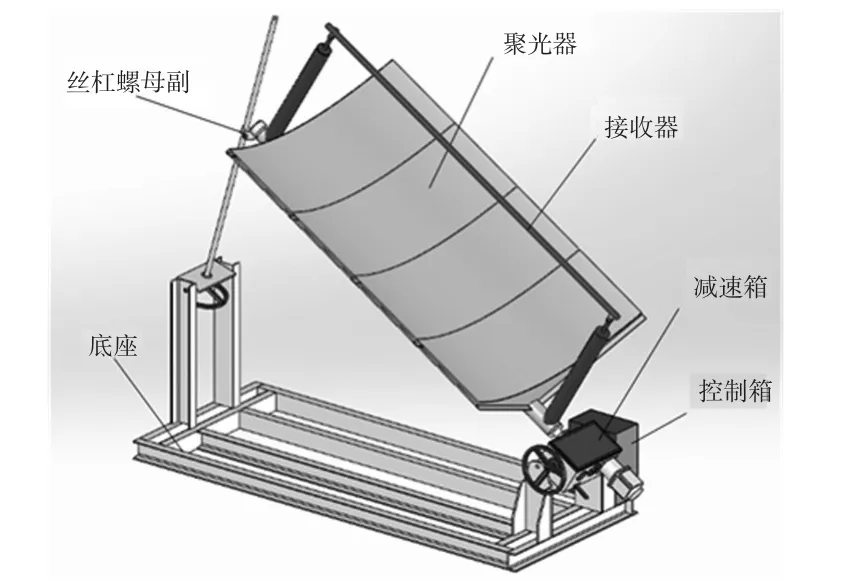
图5 集热装置整体结构
2.1 聚光器
聚光是提高太阳能集热装置集热温度的有效方法。本研究采用单轴跟踪方式,采用一维槽形抛物面聚光器,其原理是利用抛物线的几何特性将平行射入的光线反射到接收器上,它由反光镜和支架组成。
2.1.1 反光镜
太阳能工程中,用作反射光的镜面材料有玻璃、真空镀铝聚酯薄膜、不锈钢。本研究选用0.4mm镜面不锈钢作为反光材料,该材料具有耐高温、耐候性能好、使用寿命长的特点,因此在太阳能聚光器镜面中使用广泛。
反光镜光路分析如图6所示。槽式抛物面的开口宽度表示为b,其大小决定了聚光器的输入总能量;抛物面的焦距表示为f,其决定太阳像的大小。因此,投射到反光镜上的太阳能量密度显然和开口宽度和焦距f有关,将其比值称为相对光孔m,则:

研究表明,当相对光孔m=4 3时,槽形抛物面达到最佳理论焦距[3]。据此,本设计的抛物面槽形聚光器反光镜模型如图7,其焦距f=181mm,开口宽度为1 256mm,长度为1 880mm。
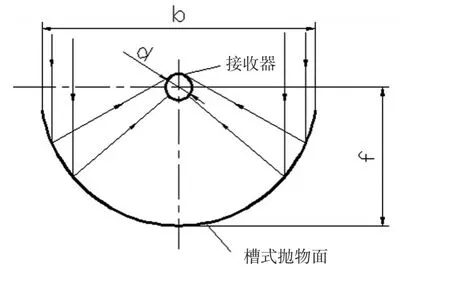
图6 反光镜光路分析
2.1.2 支架
为了使集热装置结构轻便又能有较高的整体刚度,聚光器支架为焊接结构,由筋板、连接条、接收器支撑和主轴四部分组成,如图7所示。筋板起支撑抛物槽镜面的主要作用,连接条用于连接筋板和反光镜,接收器支撑用来安装集热管,筋板及接收器支撑焊接在主轴上,由电动机带动该轴旋转,继而使整个聚光器东西方向做旋转运动。连接条选用角钢,角钢尺寸为30×30×3mm;主轴和接收器支撑分别用直径90mm、30mm的棒料。

图7 聚光器支架结构
由于反光镜由厚度为0.4mm不锈钢板制成,在焊接时容易变形、烧穿,焊接工艺不易保证,为提高加工工艺性,反光镜和筋板连接方式为铆接,在筋板两侧加连接条的同时,在抛物形侧也增加连接条,将反光镜铆接在抛物形连接条上。
2.1.3 接收器
接收器采用复合空腔集热管,其接收管为金属圆管,外罩同心玻璃罩管,弹性波纹管用来补偿玻璃罩管和金属接收管之间因材料不同而产生的热膨胀位移。其示意图如图8所示:
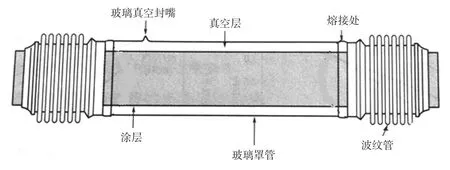
图8 高真空集热管示意图
接收器金属圆管直径d为60mm,已知抛物槽开口宽度b=1 256mm,则该聚光器的聚光比:C=b/πd=6.7。
2.2 跟踪机构
本研究采用单轴南北布置东西跟踪方式,使聚光器主轴旋转反映太阳方位角变化,而高度角则通过手动调节的方式。整个跟踪机构包括:底座、高度角执行机构和跟踪角执行机构。
2.2.1 底座
底座是整个集热装置的载体,聚光器及调整聚光器旋转角度的跟踪角执行机构、调整聚光器主轴和水平面夹角的高度角执行机构、控制箱都要安装在底座上,因此设计中要考虑其承重能力和高度角调整、聚光器旋转引起的扭转、偏摆等因素。
2.2.2 高度角执行机构
采用丝杠螺母副的运动形式,调整聚光器安装平面相对水平面的倾角β,以达到每天正午聚光器所在平面和太阳入射光线90度垂直效果,故倾角β=90°-高度角。根据计算公式,每隔两天计算出银川6-9月正午高度角。计算结果表明,银川6-9月期间正午高度角变化不 大 ,范 围 在 73.56°~48.24°,由于底座设计时已预设10°倾角,倾角β的调整范围设计为 10°~50°,每间隔10d手动调整一次。高度角执行机构(图9)设计简单,由手轮旋转丝杠,带动丝杠螺母运动,达到调整高度角的目的。丝杠和底座、丝杠和聚光器主轴在连接时均采用铰链方式,这样的机构使高度角灵活可调,并且调节过程不会影响聚光器的旋转角度。
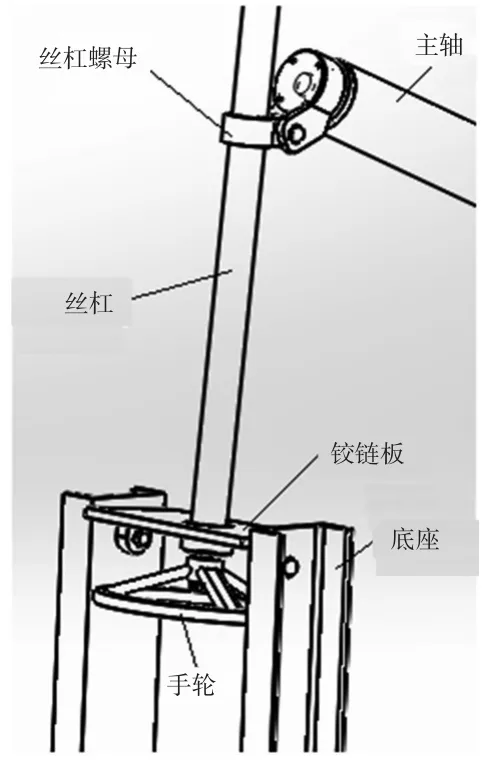
图9 高度角调整机构
2.2.3 跟踪角执行机构
聚光器绕主轴旋转,由控制系统自动控制跟踪角,达到精准跟踪的目的。跟踪角在-90°~+90°可调,为防止聚光器超出跟踪范围发生意外,转动主轴上增加了限位挡块和行程开关。同时基于系统安装初期调试和后期系统故障维修的考虑,跟踪角执行机构设计了手动运行模式,手自动模式通过转换手柄进行切换。跟踪角执行机构的传动方案可采用齿轮传动,也可采用蜗轮蜗杆传动。齿轮传动(图10a)用途广泛,其具有的优势是使用寿命长、传动效率高、布局紧凑等,但缺陷是直齿圆柱齿轮传动不能自锁,由于集热器本身转动惯量大,会在无电机驱动的情况下,集热器自身由于惯性发生旋转,导致跟踪误差。通过在集热器主轴上加配重块6的方式可以解决这一问题,但是这样就会使整个集热装置的重量增加很多,将会额外增加电机的驱动力矩。蜗轮蜗杆(图10b)传动的特点是传动比大、传动稳定、噪声小,只可单向传动。利用其单向传动的特点,使传动机构形成自锁,即可避免由于集热器惯性过大引起的自转,所以选择蜗轮蜗杆传动方式。其传动路线为:自动方式是减速器输出轴—直齿圆柱齿轮—涡轮蜗杆—聚光器主轴;手动方式是转换手柄带动拨叉使滑移齿轮和齿轮脱离,通过手动轮—蜗轮蜗杆()—聚光器主轴进行传动。
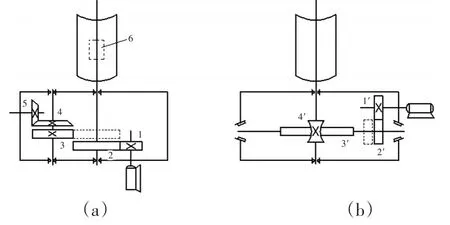
图10 齿轮箱传动方案对比图
综上所述,跟踪角执行机构实现自动跟踪太阳位置的原理是:当太阳光线入射至聚光器表面,根据赤纬角、时角和地理纬度计算跟踪角,由控制系统发出脉冲信号,驱动步进电机转动,通过齿轮箱进行传动,带动聚光器主轴旋转,继而使聚光器东西方向旋转进行太阳视位置跟踪。
3 结论
本设计适合宁夏银川地区夏季使用的单轴槽式太阳能集热装置跟踪系统,对太阳跟踪角变化规律及间歇式运动进行研究,分析了单轴南北布置东西跟踪的跟踪方式和跟踪系统间歇式运动控制方法,选取了视日运动轨迹式跟踪系统控制方法,采用以PLC为控制核心的步进电机控制策略。设计并试制了单轴抛物槽式太阳能集热装置,包括聚光器、接收器和跟踪机构。对聚光器支架结构、高度角、跟踪角执行机构进行创新性设计。通过对跟踪系统进行实验验证,所研究的太阳能集热装置跟踪系统,采用结构简单的单轴跟踪方式,能够自东向西自动跟踪太阳位置,抛物槽与地面的倾角能够通过手动调整;具有手动和自动转换功能;跟踪精度达到抛物槽法平面与日地连线的适时夹角不超过3°;跟踪系统以预先设定好的程序控制步进电机的工作,跟踪系统人为干预小、运行可靠、使用和维护方便。在跟踪精度要求不高或阳光充裕的西北地区具有广阔的推广价值和应用前景,同时也为宁夏地区研究和应用太阳能制冷空调技术起到一定的促进作用。
[1]尹丹.槽式太阳能热发电装置跟踪控制系统研究[D].哈尔滨:哈尔滨工业大学,2012.
[2]廖锦城.计算机控制双轴太阳跟踪系统及其偏差检测[D].武汉:武汉理工大学,2008.
[3]杨金焕.太阳能光伏发电应用技术[M].北京:电子工业出版社,2013.
猜你喜欢
可再生能源(2022年12期)2022-12-27
节能与环保(2022年10期)2022-11-18
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
东北电力大学学报(2022年2期)2022-09-06
可再生能源(2021年8期)2021-08-23
电源技术(2016年9期)2016-02-27
装备机械(2015年1期)2015-02-28
太阳能(2015年6期)2015-02-28
太阳能(2015年2期)2015-02-28