
基于超声波原理的直升机驾驶员头部位置检测方法研究*
2015-11-23 03:04庄江祥唐相实夏莅丰李思宇
机械研究与应用 2015年1期
庄江祥,唐相实,夏莅丰,李思宇,张 凡
(吉林大学,吉林长春 130021)
0 引言
在直升机飞行驾驶模拟器中,为增强由多显示器组成的视景系统的“沉浸感”,需要动态监测驾驶员头部位置,从而根据该位置计算呈现在各个显示器中的图像,达到视景的“无缝结合”。驾驶员的头部与检测装置之间的连接形式设计必须为无线连接,保证飞行员的头部移动不受连线长度的限制。而超声波测距技术是一项非接触式的实用测距技术,它具有传播距离远、能量消耗少、聚向性能佳等优势。由于在空气中波速较慢,因此容易检测出反射信号的信息,具有很强的分辨能力。同时,它能做到实时控制和检测可靠优势而使其具有很高的工业实用价值,因此它被广泛地应用,而且价格相对低廉,不会给企业和个人使用增加太多的成本负担[1]。驾驶员头部位置检测的本质是获得头部“视点”(等效于人眼的某点)相对于驾驶舱连体坐标系的三维坐标,即空间点的三维坐标检测。三维坐标检测是现代生产、生活必不可少的检测术,其测量范围涵盖广,既包含地球、城市等大尺度物体的三维测量,也包含飞机、船舶、建筑、汽车等中等尺度物体的三维检测,同时,随着纳米工业的兴起,三维坐标测量也已经进入纳米尺寸时代[2]。根据测量对象的不同,其测量方法也各不相同,目前中等尺度检测方法主要有三维坐标测量机、激光跟踪仪、机器视觉坐标测量机等,这些测量设备,成本高,不利于其大范围的推广使用,而该研究成果可推广到所有需要检测空间点三维坐标的领域,具有广阔的应用前景。
1 驾驶员头部位置检测流程
本文利用超声波测距原理来实现驾驶员头部位置检测。由于超声波发射器位于驾驶员头部,为了不影响驾驶员的正常操作,需要将超声波发射器与接收器之间的连接形式设计为无线连接。将一个超声波发射器驾驶员头盔上,将多个超声波接收器安装在驾驶舱的某些固定点,利用无线电信号控制发射器与接收器之间的时间逻辑,根据超声波测距原理可以测量出发射器到各个接收器之间的距离,因为接收器在空间的位置不变,可认为是已知,所以可以建立以发射器在空间的三维坐标为变量的各个距离的方程,联立方程即可求出发射器的三维坐标,即实现了驾驶员头部位置检测。
该系统的工作流程图1所示,首先,由接收控制器通过无线接法器向发射控制器发出发射开始的控制信号,发射控制器接到该信号便会发出超声波,三个超声波接收器接收到超声波后,经接收控制器计算出发射器的三维坐标,并将其放置于内部存储器中,然后,接收控制器继续发送发射开始的控制信号,重复上述过程,这样使得接收控制器的存储器中始终存在一组发射器的三维坐标,当控制计算机询问发射器坐标时,可以直接将其读取,无需经历超声波发射和接收的过程,从而保证了实时性。
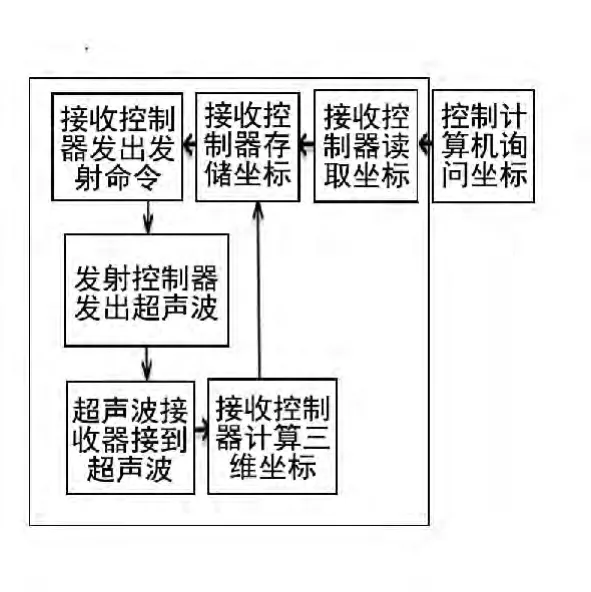
图1 系统的工作流程
2 超声波三维坐标检测装置的组成
图2为超声波发射接收装置的工作框图。超声波传感器以单片机为核心控制部分,组成部分为:4个“超声波接收模块”、1个“超声波测距发射模块”、2个增加了无线通讯的“超声波测距控制模块”。因为超声波发射和接收固定在不同位置,需要通过无线通讯同步,实现计时,故在基本的控制模块上增加了无线通讯部分,PC端通过无线传输模块实现对接收控制模块和发射控制模块的控制及数据的传输。
其基本工作原理为:利用固定在驾驶员头部上的超声波发射器发射超声波信号,由布置在定位区周围的超声波接收模块接收,测出发射器距各个接收器的距离,用几何算法即可得到发射点相对于接收点的位置,实现定位。
使用了4个超声波接收模块,这样就能得到4个距离,每3个距离能测出一个驾驶员头部的坐标,4个距离排列组合就能算出4个坐标,取平均值则能提高坐标的精确度。在实际应用中,可以根据实际情况相应地改变增加超声波接收器的数量。
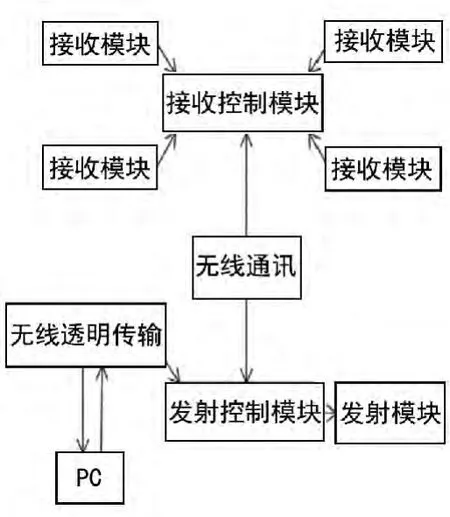
图2 超声波发射接收装置的工作框图
3 三维坐标计算方法
超声波三维坐标测量原理图,如图3所示。点P为驾驶员头部上的某点,为待测点,在该点上放置一超声波发射器,在空间中3个固定点A、B、C处分别放置三个超声波接收器,其在坐标系oxyz中的坐标已知,设利用超声波测距原理测得的PA、PB、PC的距离分别为la、lb、lc,则可建立以点P坐标为变量q-=[x y z]T的非线性方程组:
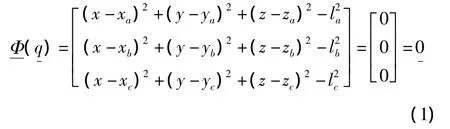
对上述方程组进行联立求解便可求出点P的坐标。对于非线性方程组,一般采用牛顿迭代法进行求解,该方法的关键是选取合适的迭代初值,本课题中,可认为点P的初始位置是已知的,将其作为初值进行迭代,将计算得到的新的点P的坐标作为下次迭代的初值。牛顿迭代法第i步的迭代公式如下:

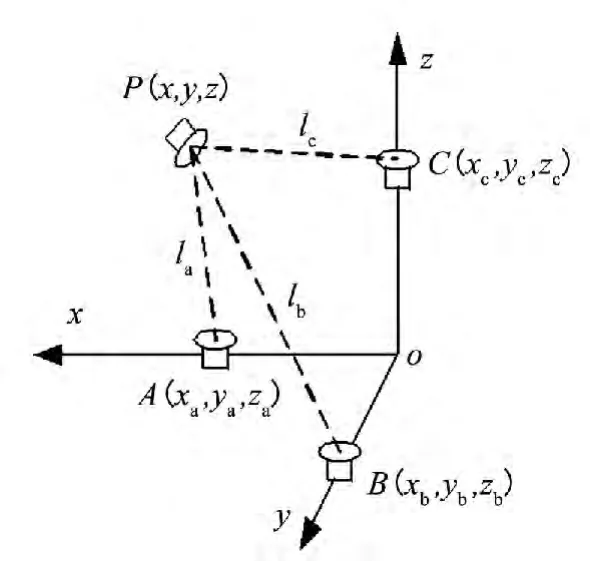
图3 超声波三维坐标测量原理图
4 测试系统的检测精度及测量范围
检测精度和测量范围是系统的重要指标,需要对系统进行必要的后期调试及测量重要指标。如图4所示,为超声波三维坐标测试实验台示意图,接收器座板上密布用于放置超声波接收器的孔;发射器座板上可以放置超声波发射器,并能沿各个轴移动,轴上的移动通过电动推杆来实现。超声波接收器可放置于接收器底板的任意孔内,以便于测试不同的接收器位置对检测精度的影响;超声波发射器放置于发射器底板孔内,其可在一定范围内沿着各个轴线方向任意移动,从而可以检测系统的测量范围。在超声波测量
[1] 陈引初,胡 斌.消防救援机器人的研究[J].消防技术与产品信息,2005,7(2):23-25.
[2] 陈吉朝,王克印,刘耀鹏.国内外森林灭火弹发射装置研究现状[J].机电工程,2012(29):616-620.
[3] 茹银凤.航天技术专民用消防利器擒火魔我国首创“导弹”灭火系统[J].广东安全生产,2013(20):38-39.
[4] 刘肖岩.利用直升机进行高层建筑灭火救援[J].消防技术与产品信息,2011(6):84-85.
[5] 史 强,李 露,邱自学.悬吊式高空消防机器人的设计及姿态控制原理[J].机械设计与制造,2012(12):162-164.
[6] 王东方,何嘉鹏,施庆生.高层建筑火灾时前室门的流场分析[J].南京理工大学学报,1999,23(1):77-80.
[7] 单 鹏,多维气体动力学基础[M].北京航空航天大学出版社,2004.
[8] 戴 耀,汪德虎.舰艇运动对舰炮起始发射条件的影响[J].火炮发射与控制学报,2002(3):9-12.
[9] 赵俊利,曹 锋.气体炮实用内弹道方程及应用[J].火炮发射与控制学报,2003(3):48-50.
[10] 金志明,袁亚雄.内弹道气动力原理[M].北京:国防工业出版社,1983.
猜你喜欢
科学(2020年3期)2020-01-06
兵器知识(2019年1期)2019-01-23
汽车维护与修理(2018年3期)2018-12-07
铁道通信信号(2018年8期)2018-11-10
小猕猴智力画刊(2018年7期)2018-08-08
动漫星空(兴趣百科)(2017年9期)2017-10-30
电子制作(2017年7期)2017-06-05
上海铁道增刊(2015年1期)2015-03-23
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
