
基于DELMIA二次开发的转向架三维装配仿真系统的开发
2015-11-22 06:24谢莹莹马晓光陈亚丽
机械制造 2015年4期
□ 谢莹莹 □ 鲍 凯 □ 马晓光 □ 陈亚丽 □ 田 威
1.南车 南京浦镇车辆有限公司 南京 210031
2.南京航空航天大学 机电学院 南京 210016
基于DELMIA二次开发的转向架三维装配仿真系统的开发
□ 谢莹莹1□ 鲍 凯1□ 马晓光1□ 陈亚丽2□ 田 威2
1.南车 南京浦镇车辆有限公司 南京 210031
2.南京航空航天大学 机电学院 南京 210016
转向架是轨道车辆走行部的关键部分,研究其装配工艺规划和验证方法具有重要意义。通过对转向架的装配工艺流程进行分析,针对DELMIA仿真软件中存在的模型装配置位量大等问题,以VB为开发工具、DELMIA软件为平台,开发了转向架三维仿真系统。该系统应用虚拟装配技术,能批量提取模型信息,一次性导入、配置仿真环境,通过对装配过程中的碰撞干涉进行实时监测,最后输出三维工艺文件,极大地减轻了使用者的工作量和使用难度,对装配工艺验证优化和一线工人培训具有重要意义。
工艺规划 干涉监测 三维仿真系统 工艺验证优化
DELMIA是数字化企业精益制造集成式解决方案(Digital Enterprise Lean Manufacturing Interaction Application)的缩写,是法国Dassault Systems公司PLM(Product Life Management)家族成员之一,是一个面向设计、制造、维护、人机过程的“数字化工厂”仿真平台,与CATIA软件互为补充,应用涵盖了航空、航天、汽车和船舶等几乎所有机械产品的数字化制造[1]。
装配是转向架制造过程中一个非常重要的环节。然而,传统的手工装配逐渐暴露出众多弊端,如效率低,不能预先发现和处理设计错误等[2-4]。在转向架装配工艺规划中应用虚拟装配技术[5-7],可在产品实际装配之前及时发现产品设计和工艺设计中存在的问题,有效减少装配缺陷和产品的故障率,降低产品的研制风险,保证产品装配的质量。但是仿真软件的应用存在模型装配位置工作量大、使用难度较高的问题。本文通过对DELMIA进行二次开发,批量提取模型信息,一次性导入、配置仿真环境,最后输出三维工艺文件,极大减少了转向架装配仿真路径规划的工作量,能提前发现工艺规划不合理引起的干涉问题,提高了转向架装配仿真的效率和质量。
1 转向架装配工艺分析
以某典型型号转向架为例,其详细装配流程如图1所示。
转向架结构可细分为定位转臂、牵引装置、扭杆装置、基础制动装置等,整个装配过程可分为子部件组装、挂件装配、落轮、试验工序4部分。其中子部件组装包括构架衬套压装、扭杆预组、牵引节点预组、弹簧上夹板组装、定位转臂节点压装;挂件装配包括定位转臂组装、牵引装置组装、抗侧滚扭杆组装、基础制动组装、制动管路组装,然后转入落轮工序,最后进行制动试验和静载试验。

▲图1 转向架装配流程图
2 转向架三维仿真系统开发
2.1 系统结构
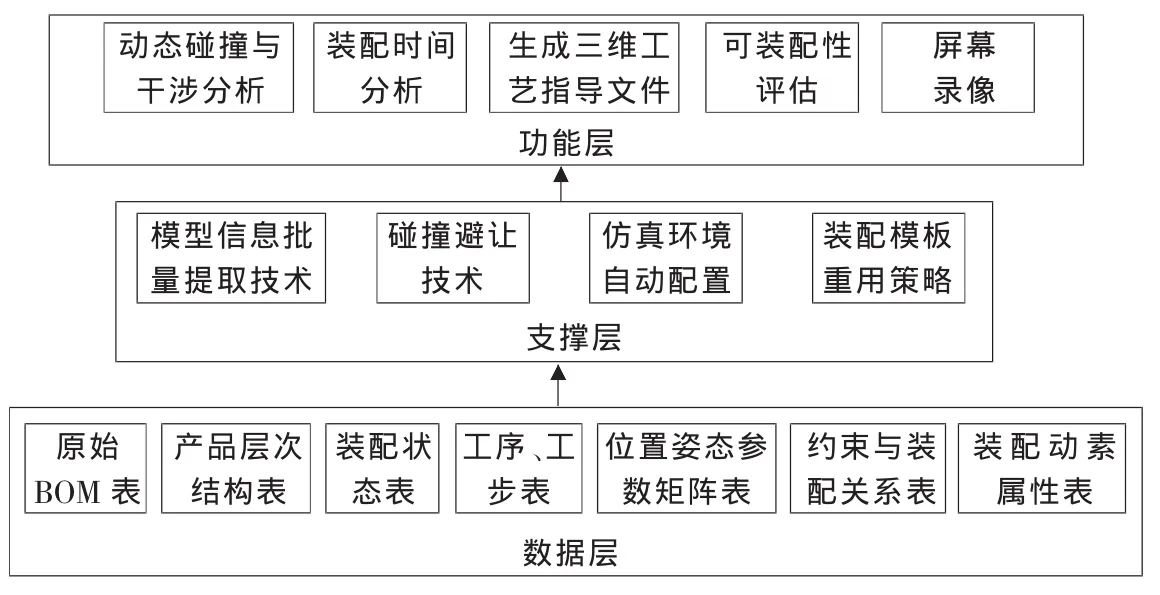
三维工艺装配仿真系统结构如图2所示,系统包括3大部分:数据层、支撑层、功能层。
(1)数据层。总结企业生产资源,对仿真所需的资源进行分类描述,建立仿真资源数据库,作为装配仿真的数据来源。
(2)支撑层。通过对模型信息的提取,自动导入和置位各个组件,并研究装配模板的重用策略,实现新产品装配仿真路径的快速规划。
(3)功能层。包括动态碰撞与干涉分析、装配时间分析、生成三维工艺指导文件、可装配性评估、屏幕录像等多种功能。
2.2 系统开发工具
DELMIA提供了多种二次开发的接口,其中包括自动化对象编程(V5 Automation)和开放的基于构件的应用编程接口 (CAA)。CAA(Component Application Architecture)是DELMIA的一套C++函数库,该函数库在DELMIA运行时加载,用户可通过快速应用研发环境RADE(Rapid Application Development Environment)和不同的API(Application Programming Interface)接口程序来完成在VC++平台下的代码编写,实现与DELMIA的通信功能。这种方法可进行最有效率的程序开发,但入门困难[8]。
CAA的开发方式具有开放性高、开发效率高的优点,而Automation方式具有容易掌握、开发难度小的优点。DELMIA作为提供Dispatch接口的服务器,二次开发的应用程序作为客户端通过 Dispatch接口操控DELMIA程序。二次开发的应用程序并不是直接获取及处理DELMIA数据,而是在DELMIA进程之外,外部程序间接地通过DELMIA暴露的COM组件对象的方法和属性来获取、设置及处理数据。窗体程序与数据库通过OLEDB进行连接。在窗体页面和程序中实现对数据库的连接、数据的增删改,以及根据从数据库中获取的参数,调用DELMIA软件快速进行相关操作。
基于上述两种开发方式的特点,本文使用Automation方法对DELMIA进行二次开发,开发环境选用Visual Basic 6.0,通过良好的用户交互界面,结合DLEMIA软件的宏录制功能,实现三维工艺装配仿真系统的功能。
▲图2 三维工艺仿真系统结构图

▲图3 模型信息提取模块流程图
3 系统功能模块
3.1 模型信息批量提取模块
在分析所有转向架结构的基础上,总结出4种典型的转向架结构,基本涵盖各种型号的产品,每种结构都由相同的零部件组成。信息模型批量提取模块针对这4种结构的产品模型,对产品树、环境模型的任意层数节点信息,进行批量识别、提取并保存到数据表中,不仅能节省人工统计时间,还可避免人为错漏。保存到数据表的信息包括零件号、文件名、实例名、隶属关系、质量、尺寸、颜色、位置矩阵等。流程如图3所示。
3.2 仿真环境自动配置模块
在DELMIA仿真过程中,需要将各种工装工具一一导入文件中,并逐个调整位置。由于转向架装配流程较多,牵涉到较多的模型,因此这是一个十分繁杂的工作。针对这种情况,仿真环境自动配置模块依据模型信息批量提取模块存入的相关典型产品的位置信息,自动导入、置位相关组件,从而极大减轻模型布局时间。
选择需要仿真的转向架型号、所属类型和具体工序,点击“一键导入”按钮,一次性导入相关模型,具体包括:
①把转向架模型导入到产品目录下,可在屏幕左边目录树的产品列表中找到已经导入的模型。
②导入资源模型,DELMIA中的资源是指在装配过程中使用到的非产品的实物元素,如车间、天车、装配线各台位、翻转机、静载试验机、运输车、零件箱、套筒扭力扳手、开口扳手、棘轮扳手、毛刷等,导入后可在资源列表中找到。
需要指出的是,不同的产品由于型号和尺寸的区别,需要进行不同程度的位置微调,不过,相比人工导入和调整,已经节省了大量时间。
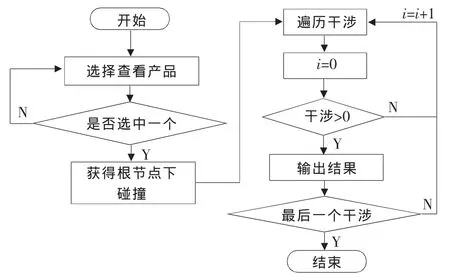
▲图4 干涉实时监测模块的功能实现流程图
3.3 干涉实时监测模块
图4为干涉实时监测模块的功能实现流程图。通过二次开发,运用DEIMIA软件中的干涉检查模式,能进行干涉检查。当系统发现零件之间、零件与工装之间存在干涉情况时将报警,同时显示干涉区域和干涉量,以方便设计人员检查和分析原因。干涉的原因一般是装配序列或装配路径不合理,要对装配序列及路径进行详细分析,并不断修正,直到符合加工装配的需求。
3.4 后处理模块
后处理模块主要包括屏幕录制功能和三维工艺文件输出功能(见图5)。屏幕录像功能能将装配仿真过程记录下来,生成视频,保存仿真结果。三维工艺文件的输出是指通过如图所示的网页模块,生成任意产品相关信息、工序的作业内容文字、视频和图片信息,以及该工序对应的工装工具图片信息等。该模块生成的三维工艺文件不仅能作为工程人员制定装配工艺的设计参考资料,还能直观地指导现场操作人员进行转向架装配,同时能作为重要的资料对装配工人进行培训。

▲图5 后处理模块的功能
4 结论
本文在分析转向架装配流程的基础上,针对仿真软件DELMIA在应用过程中工作繁琐、使用难度大的问题,在DELMIA平台上,应用自动化对象接口技术,用VB语言开发了转向架装配三维仿真系统。系统研究了对模型相关信息批量提取的技术,并以此为基础开发了一次性导入所有产品和工装、工具、车间环境模型并置位的功能,大大减轻了操作者手工导入调整的时间。通过仿真检测模块能动态反映整个装配过程中是否会产生干涉情况,最后将仿真结果输出为三维工艺指导文件,以其直观性对现场工人培训提供帮助。
[1]王占海,翟庆刚.DELMIA二次开发技术初探 [J].西安航空技术高等专科学校学报,2010(1):1-3.
[2]屈力刚,魏佩振,苑俊超.基于三维工艺模型的装配现场可视化[J].制造业自动化,2013(20):83-87.
[3]刘国华,姚英学.虚拟装配技术[J].机械制造,2006(8):65-67.
[4]刘海江,肖会祥.白车身拼焊机器人空间运动轨迹分析与仿真[J].制造业自动化,2003(12):18-20.
[5]张晓伟,原思聪,林艳,等.基于DELMIA的船体虚拟装配过程仿真研究 [J].起重运输机械,2010(2):65-67.
[6]陶品,叶榛,王洋,等.虚拟装配仿真平台的研究与实现[J].系统仿真学报,2001(6):704-706.
[7]张烨,宁汝新,刘检华.面向虚拟装配的装配序列规划技术研究 [J].计算机集成制造系统,2006(1):90-94.
[8]李维学,王仲奇,康永刚,等.基于CATIA V5二次开发的产品自动装配[J].机械制造,2010(1):40-43.
(编辑 功 成)
TH162
A
1000-4998(2015)04-0055-03
2014年10月
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22
甘肃科技(2020年20期)2020-04-13
山东冶金(2019年6期)2020-01-06
制造技术与机床(2019年12期)2020-01-06
世界农药(2019年2期)2019-07-13
模具制造(2019年3期)2019-06-06
西南交通大学学报(2018年5期)2018-11-08
制造技术与机床(2017年11期)2017-12-18
铜业工程(2015年4期)2015-12-29
铁道运营技术(2015年3期)2015-12-23
