
基于浮动车数据的机动车排放实时测算模型
2015-11-18 01:29郝艳召宋国华邱兆文王宏图
中国环境科学 2015年2期
郝艳召,宋国华,邱兆文,王宏图
(1.长安大学汽车学院,陕西 西安 710064;2.北京交通大学交通运输学院,北京 100044;3.长春市城乡规划设计研究院,吉林 长春 130033)
基于浮动车数据的机动车排放实时测算模型
郝艳召1*,宋国华2,邱兆文1,王宏图3
(1.长安大学汽车学院,陕西 西安 710064;2.北京交通大学交通运输学院,北京 100044;3.长春市城乡规划设计研究院,吉林 长春 130033)
根据浮动车检测技术可针对单车采集,所收集数据中的平均速度按照采样间隔连续的特点,利用道路实测数据建立了面向其应用的轻型车尾气排放实时测算模型.模型中引入平均速度增量(ASI)指标对平均速度进行细分,并以其来反映相同平均速度下的排放变化.结果表明,与实测数据相比,模型对CO2的计算误差在10%以内;NOx、HC和CO的计算误差在15%以内.同时提出了模型使用方法,可以实现对路网中交通尾气污染的实时测算和动态评估.
机动车排放;实时测算;浮动车;平均速度增量
对交通尾气排放进行实时测算和动态显示能够帮助环境管理者及时掌握区域机动车尾气污染状况和快速发现重污染点段,并尽快制定出合理的管控策略;同时也能够为居民的日常出行提供参考.而要实现该目的,则需要路网中不同路段的实时交通数据和与之相配套的机动车排放实时测算模型.
开展尾气排放测算的交通数据包括路段车流量和车速2个参数,目前广泛使用的微波和线圈检测技术可以实时获取上述信息;但这2种技术均基于固定点采集,获得的车速参数为断面平均速度而非行程速度[1],与排放测算需要的行程速度不匹配.浮动车数据(FCD)采集技术具有路网覆盖范围广并且实时采集的特点,能够得到单个浮动车的行程速度[2],因此在路网实时运行状态评估和交通事件检测[3-4]等方面得到了广泛应用;如将其与机动车排放模型相结合,则使得实时测算路网交通尾气污染成为可能.
在机动车排放测算模型方面,目前国外已经开发了多个排放模型,如欧洲的COPERT模型,美国的MOBILE模型、IVE模型和MOVES模型等[5];但这些模型内嵌的排放数据均来自本国的实车测试,由于车辆技术状况和测试标准不同,将其用于我国时会产生一定的误差[6].此外一些学者也基于国内实测数据开发了多个排放模型,如杨方[7]以机动车比功率(VSP)、速度和加速度作为影响参数建立了轻型车排放模型MEM-P;王云鹏等[8]以速度作为自变量,运用多项式拟合建立了单车实际道路尾气模型;刘欢[9]建立了以VSP为变量的柴油车排放模型;郭栋等[10]选取速度、加速度作为输入参数,分别采用回归和神经网络法建立了轻型车排放模型.
国内所建排放模型的共同特点是主要考虑了车辆行驶对尾气排放的影响,所需输入参数均为逐秒速度,或需要由逐秒速度直接转化而来.但是由于通信成本和数据处理量的限制,FCD的采集频率大多不是逐秒[11],最终得到的行程速度为采样时间内的平均值,无法同现有排放模型衔接.虽然逐秒速度比平均速度能够更全面的反映车辆微观的行驶变化,但是由于目前无法获得大范围路网中行驶车辆的逐秒速度,使得这些模型应用于路网交通尾气污染实时测算时受到限制.而FCD具有较高的时空分辨率,是现有技术条件下实时获取大范围路网中车辆行驶数据的一种较好手段.基于此,本文充分考虑FCD的采集、处理原理和字段特征,建立面向其应用的机动车排放模型,从而实现对交通尾气污染的实时测算和动态评估.
1 研究方法
1.1 浮动车数据字段特征
从数据采集和处理角度,FCD可分为原始数据和处理数据两类.其中FCD原始数据直接由GPS设备获得,数据字段包括浮动车编号、记录日期和时间、瞬时速度和经纬度信息等;由于采样间隔较大,车辆的瞬时速度并不是逐秒连续的.之后将原始数据按照经纬度进行地图匹配,并进行一系列运算后得到FCD处理数据[12];最终得到的数据字段包括浮动车编号、记录日期和时间、路段编号、平均速度、行驶比例等;其中路段编号指采样时段内浮动车所经过路段的编号;平均速度指采样时段内浮动车的平均行程速度;行驶比例表示采样时段内浮动车行驶距离占该路段长度的比例.
由于FCD并不是逐秒采集,因此无法满足现有模型的输入需求.另一方面,该技术实现了针对单车进行实时跟踪采集,所得交通信息虽然逐秒不连续,但却按照固定采样间隔存在连续性;本文即基于该特点开展后续的建模研究.
1.2 实测数据处理与分析
由于FCD只有平均速度,缺乏对应的排放数据,因此本文利用车载检测技术[7]进行了30辆轻型车的行驶和排放数据收集;车型均为轻型汽油电喷车,其中国I车13辆,国II车7辆,国III车10辆.收集基于道路实测,采样频率为逐秒,原始数据字段包含车辆逐秒的速度、加速度、经纬度和对应的排放信息.
1.2.1 数据处理 为了与FCD相匹配,需要将实测数据按照一定的时间间隔划分行驶片段,具体如图1所示.之后再对该片段内的逐秒数据进行集计,最终得到与FCD一致的平均速度和对应的平均排放.此外还需对同一辆车的数据按照时间先后进行编号,以保持数据的连续性.
对于时间间隔的选取,何兆成等[12]认为只有采样时间间隔不大于60s,车辆才有可能在同一个路段上留下至少2个定位点,以保证单一浮动车平均速度的计算精度.因此,本文以1min间隔来划分行驶片段.
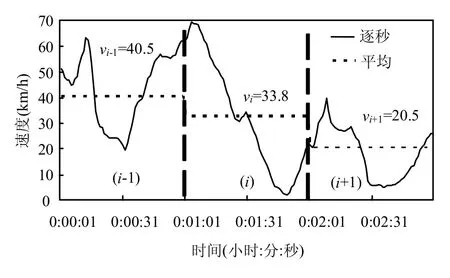
图1 行驶片段划分Fig.1 Driving segment division
1.2.2 数据分析 (1)平均速度增量:由于车辆行驶的持续性和延续性,各个行驶片段并不是独立的.对于某辆车来说,其前一片段中的行驶状态会直接影响到当前片段的行驶情况.以此类推,当前片段的行驶状态也会影响到下一片段的行驶;而通过逆向思维,可以认为下一片段的行驶状态可以反向表征当前片段的行驶特征.
基于此,为了更好的区分相同平均速度下车辆的行驶特征和排放差异,本文提出平均速度增量(ASI)的概念.其中前平均速度增量(Fore_ASI,FASI)指当前行驶片段i同其前一行驶片段i-1的平均速度之差;后平均速度增量(Post_ASI,PASI)指下一行驶片段i+1同当前行驶片段i的平均速度之差,单位均为km/h.最终根据FASI和PASI为正或负,将相同平均速度下的行驶片段分为以下4类:
①前正后正:FASI>0且PASI>0;
②前负后负:FASI≤0且PASI≤0;
③前负后正:FASI≤0且PASI>0;
④前正后负:FASI>0且PASI≤0.
(2) 不同ASI条件下排放比较:为了分析相同平均速度、不同ASI条件下车辆的平均排放是否存在差异,随机挑选一辆测试车,以CO2为例进行对比分析,如图2所示.该图所选4个行驶片段的平均速度均在30~32km/h之间,而其对应的CO2平均排放却高低不同;其中FASI≤0且PASI≤0条件下最低,FASI>0且PASI>0条件下最高,其余两种情况的排放居于中间;而FASI≤0且PASI>0条件下的排放又稍高于FASI>0且PASI≤0条件.由此可以看出采用ASI进行相同平均速度下车辆行驶状态的细分可以较好的反映出对应平均排放的变化.

图2 不同ASI条件下排放比较Fig.2 Comparison of average emissions under different ASI conditions? FASI<0,PASI<0?FASI<0,PASI>0FASI>0,PASI<0 ?FASI>0,PASI>0
2 模型建立与验证
2.1 建模方法
首先将数据分为建模和模型验证两部分,各自的样本量见表1.考虑到快速路和非快速路上车辆的行驶状态有着本质的不同,本文将行驶片段按照道路类型分为2类,之后再按照ASI条件进一步细分为4类.最后选取平均速度、FAS和PASI为自变量,采用逐步回归的最小二乘估计建立模型,所考虑的污染物包括NOx、HC、CO和CO2.

表1 行驶片段样本量Table 1 Data Sample Sizes of Driving Segment
统计建模按照所采用的数据可分为2种,第1种直接采用散点数据建模;第2种则将散点数据按照一定区间集计平均后,再基于平均值建模.考虑到散点数据所包含的信息更为全面,本文采用第一种方法.此外由于各污染物的平均排放率绝对值较小,为了保证所建立模型的计算值非负,本文采用指数模型形式,如下式所示.

式中:Ave_ERi为i种污染物的平均排放率,g/s; β0~β6为回归系数,无量纲;v为平均速度,km/h; FASI和PASI分别为当前行驶片段的前平均速度增量和后平均速度增量,km/h.
2.2 模型建立
建模过程中需要对所建模型进行各项检验,包括拟合优度检验、显著性检验和基本假设检验.检验中发现与存在一定的共线性,但考虑到对于仅用于预测的模型,只要保证自变量相关类型在预测期间保持不变,即使存在共线性也可获得较好的预测效果[13];因此当增加的自变量对模型的调整复决定系数提高很大时(大于0.01),即使存在共线性,仍选择保留该自变量.当模型存在异方差时,则进一步采用加权最小二乘估计进行改进[14].最终得到轻型车在快速路和非快速路上的排放模型如表2和表3所示.
2.3 模型验证
利用预留的非建模实测数据来分析所建立模型的计算精度.由于模型的开发目的并不是用于单车,而是对路段上的车队排放进行计算,因此采用的验证数据是随机挑选的多个车辆的数据.此外考虑到目前对交通尾气污染进行评估时所采用的时间分辨率最高一般为小时,而1h内固定路段上的平均速度变化范围一般在10km/h左右;因此首先将行驶片段以10km/h为步长进行区间划分,进而分析不同平均速度区间下的模型计算精度,具体如表4和表5所示.可以看出,CO2排放计算误差基本控制在10%以内;而CO排放受到三元催化器的影响,计算精度有所下降,但误差也基本控制在15%以内,NOx和HC的计算误差与CO类似.因此可以认为本文所建立的排放模型具有较好的计算精度.
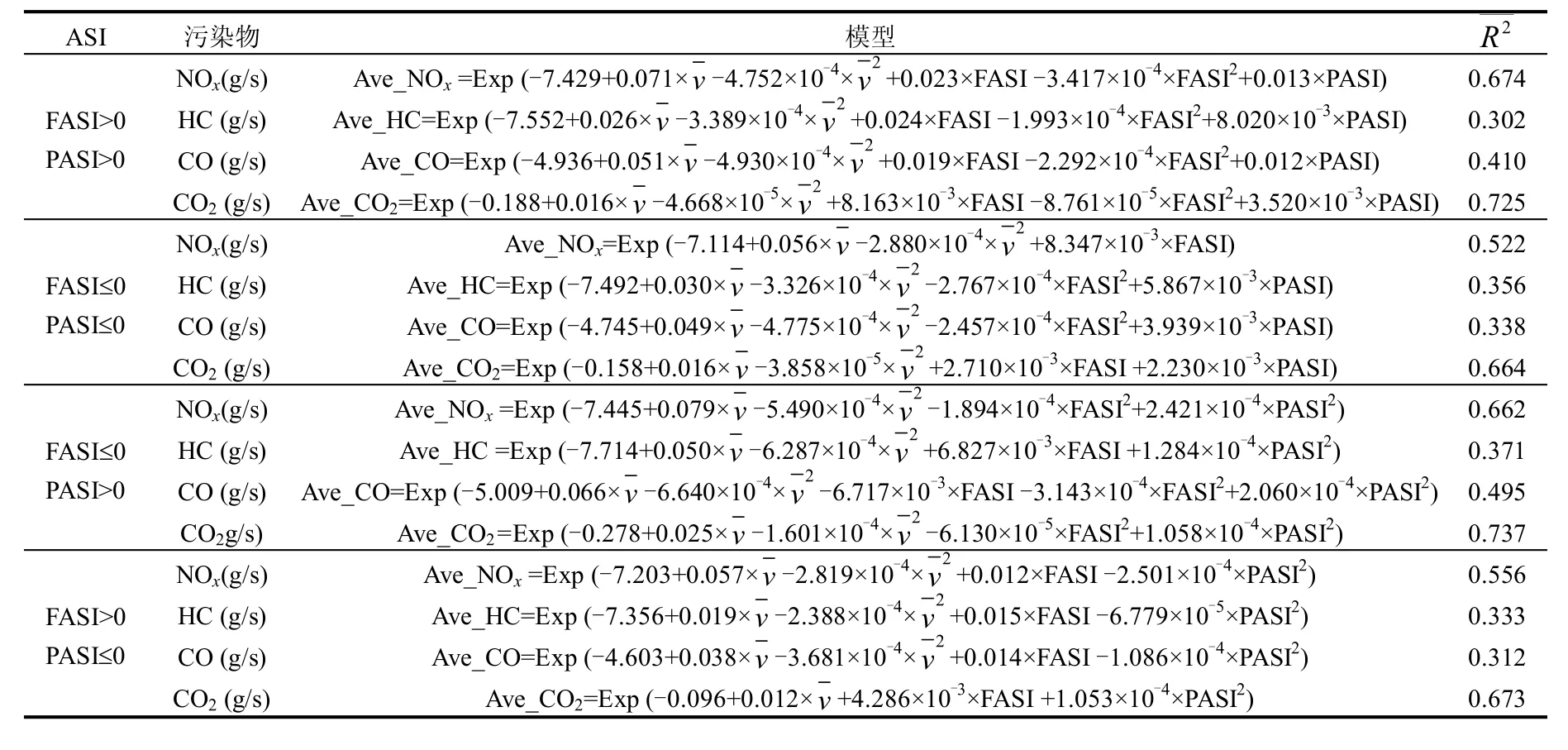
表2 轻型车-快速路模型Table 2 Emission models for light duty vehicles on expressways
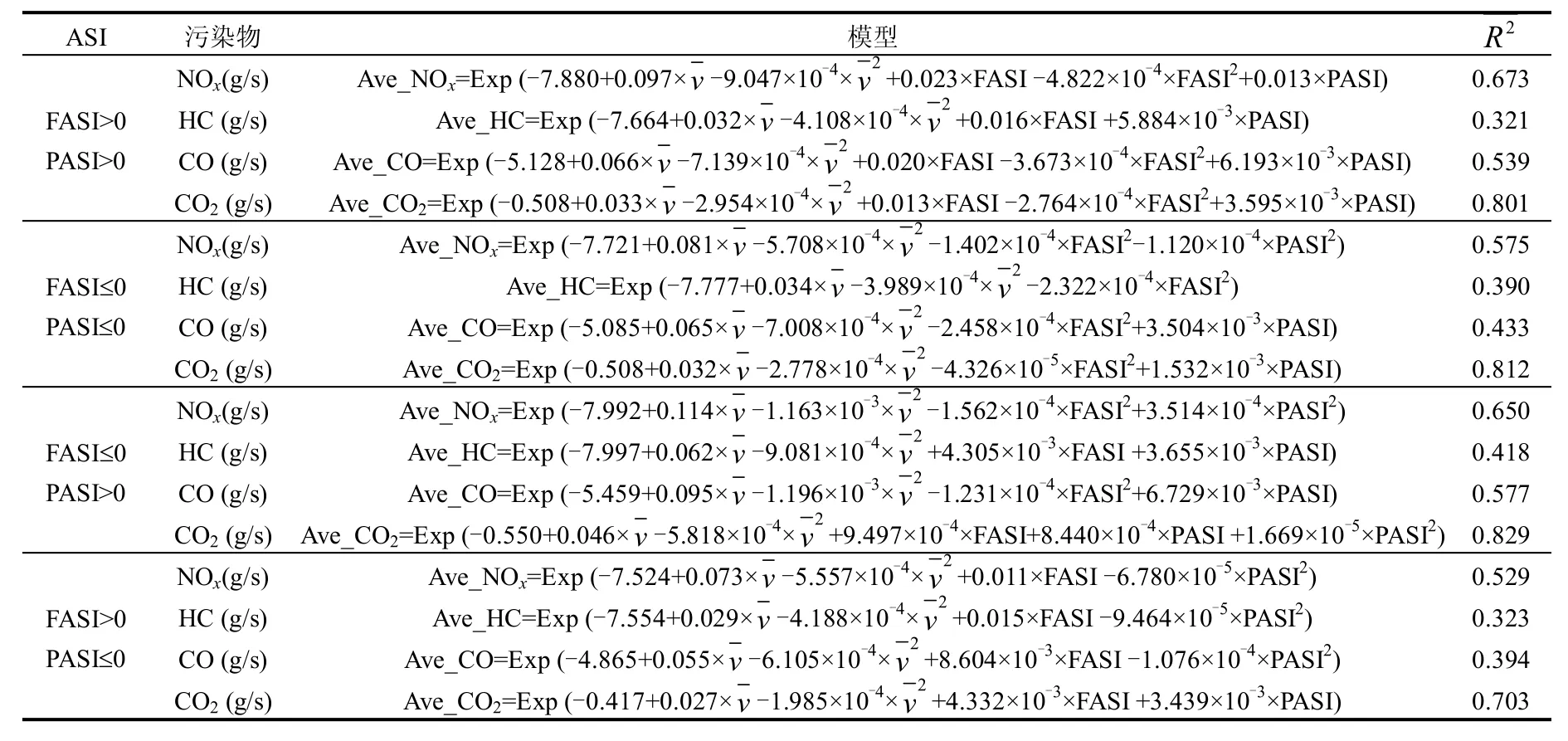
表3 轻型车-非快速路模型Table 3 Emission models for light duty vehicles on non-expressways

表4 轻型车快速路模型计算精度Table 4 Calculation accuracy - light duty vehicles on expressways
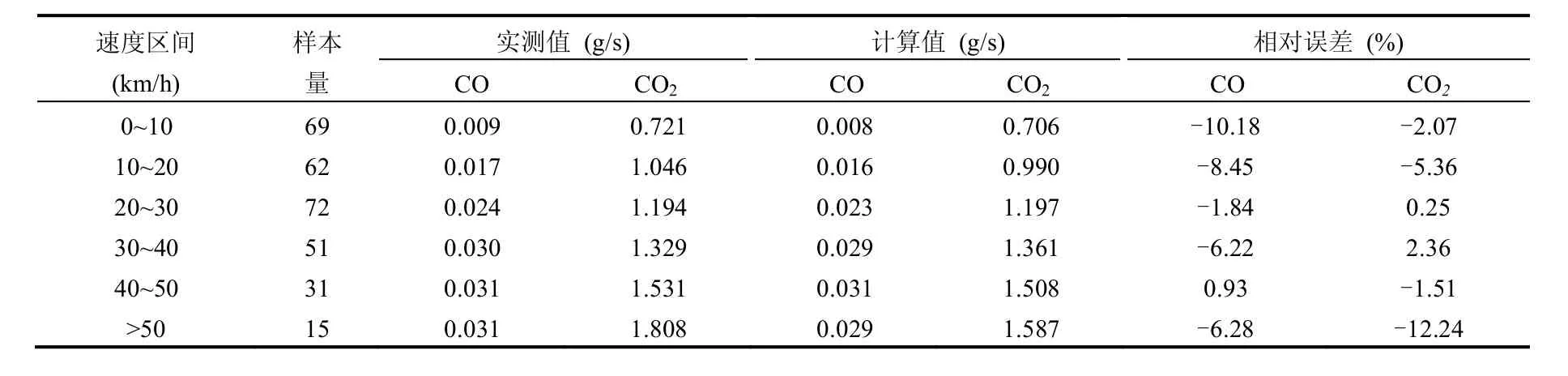
表5 轻型车非快速路模型计算精度Table 5 Calculation accuracy - light duty vehicles on non-expressways
3 模型应用
本文所建立模型直接以FCD中的平均速度作为输入,由于FCD采集的实时性,可以实现对路网交通尾气污染的实时测算和动态评估;同时由于FCD覆盖路网范围很大,还可以依托其建立高时空分辨率的机动车排放清单,对区域交通尾气污染进行时空分布研究.需要说明的是,本文所建模型适用于对路网中不同路段上车队整体排放的测算,并不适用于针对单车的逐秒排放测算.模型应用如下式所示:
式中: EIj为路段j上的尾气排放强度,kg/km;EFij为路段j上车型i的排放因子,g/(km·车);TVij为分析时段内路段j上车型i的交通流量,辆;n为车型分类数.

式中:ERijk为路段j上浮动车k的平均排放率,g/s;Tijk为浮动车k在路段j上的行驶时间,s;Dijk为浮动车k在路段j上的行驶距离,km;m为分析时段内路段j上通过的浮动车数量,辆.
下面应用所建立的模型对北京市北四环学院桥-健翔桥之间路段的交通尾气污染时变规律进行分析,选取时间为某工作日早6:00至晚22:00,选取的污染物为NOx、HC和CO.下面概述其计算步骤:
1) 根据路段编号筛选出研究路段上的FCD,并通过浮动车编号和记录时间寻找相邻的行驶片段,分别计算出FASI和PASI;
2) 依据公式(3)计算分车型排放因子,其中ERijk由模型计算得到,Tijk和Dijk由行驶比例字段结合路段长度和平均速度计算得到;分析时间间隔设为1h,即m为1h内研究路段上通过的浮动车总数;此外案例将车辆分为轻型车和重型车两种,由于数据有限,本文未对重型车进行排放建模,故参考《在用车综合排放因子表》[15]按照一定的比例系数基于轻型车排放因子折算得到.
3) 依据公式(2)计算研究路段上各小时的交通尾气排放强度,其中各车型交通流量由安置在研究路段的微波检测器自动检测得到.

图3 分析路段上3种污染物的时变规律Fig.3 Temporal changes of emissions on the analytical road
最终的计算结果如图3所示.可以看出,该路段上污染物的排放强度在时间上均呈现双峰变化规律,这与城市中的日常交通出行规律相近;其中第1个尾气污染高峰范围较宽,包含7:00-10:00共3h;而第2个高峰范围较窄,基本只包含17:00~18:00的1h.此外从交通流向来看,同一时段内环和外环NOx的排放强度相差不大;而HC和CO的排放强度则上午是外环高于内环,下午是内环高于外环.
由于时间和成本限制,建模时采用的排放数据覆盖车型有限,后续会继续开展不同类型车辆的排放测试,以对模型进行完善和扩展.
4 结论
4.1 机动车在相同平均速度下的行驶状态存在一定差异,进而影响到尾气排放.本文通过引入平均速度增量指标,并按照道路类型进行分类,能够较好的反映出相同平均速度下车辆的排放差异;这也有助于提高所建立排放模型的计算精度.
4.2 利用道路实测数据建立了面向FCD应用的轻型车尾气排放测算模型,实现了对路网中交通尾气污染的实时测算和动态评估.模型中采用的平均速度为1min平均值,能够更好的反映出行驶状态对尾气排放的细微影响;验证结果表明:所建立模型对 CO2的计算误差在10%以内;NOx、HC和CO的计算误差在15%以内.
4.3 提出了针对路网交通尾气污染开展实时测算和评估的模型应用方法,并对北京市典型路段的交通尾气污染时变规律进行了分析.分析结果表明:该路段污染物排放强度在时间上呈双峰变化规律,与城市中的日常交通出行规律相近;从交通流向来看,同一时段内环和外环NOx排放强度相差不大;而HC和CO排放强度则上午是外环高于内环,下午是内环高于外环.
[1]郑建湖,王明华.动态交通信息采集技术比较分析 [J]. 交通标准化, 2009,10(4):42-47.
[2]姜桂艳,常安德,吴超腾.基于GPS浮动车的交通信息采集方法[J]. 吉林大学学报(工学版), 2010,40(4):971-975.
[3]翁剑成,周 翔,翟雅峤,等.浮动车数据在城市宏观交通特性研究中的应用 [J]. 武汉理工大学学报(交通科学与工程版),2008,32(5):806-809.
[4]余 柳,于 雷,戚 懿,等.基于浮动车数据的城市快速路交通事件检测算法研究 [J]. 交通运输系统工程与信息, 2008, 8(4):36-41.
[5]马因韬,刘启汉,雷国强,等.机动车排放模型的应用及其适用性比较 [J]. 北京大学学报:自然科学版, 2008,44(2):308-316.
[6]王岐东,霍 红,姚志良,等.基于工况的城市机动车排放模型DCMEM的开发 [J]. 环境科学, 2008,29(11):3285-390.
[7]杨 方.基于PEMS的轻型车热稳状态下微观尾气排放模型[D]. 北京:北京交通大学, 2005.
[8]王云鹏,沙学锋,李世武,等.城市道路车辆排放测试与模拟 [J].中国公路学报, 2006,19(5):88-92.
[9]Liu H, He K B, Lents J. A methodology for developing a micro-emission model based on on-board heavy duty truck tests in China [C]//87th Transportation Research Board Annual Meeting CD-ROM, Washington, D.C., USA, 2008.
[10]郭 栋,高 松,王晓原,等.轻型车微观排放模型的建立与比较分析 [J]. 中南大学学报(自然科学版), 2012,43(10):4123-4128.
[11]吴世全.基于浮动车数据交通参数提取技术探讨 [J]. 测绘与空间地理信息, 2013,36(7):133-136.
[12]何兆成,卢瑞琪,聂佩林.基于浮动车定位数据的高速公路区间平均速度估计 [J]. 公路交通科技, 2011,28(6):128-135.
[13]贾俊平,何晓群,金勇进.统计学 [M]. 北京:中国人民大学出版社, 2009.
[14]何晓群,刘文卿.应用回归分析 [M]. 北京:中国人民大学出版社, 2001.
[15]环境保护部机动车排污监控中心.关于机动车排放因子的通知[EB/OL]. http://www.vecc-sepa.org.cn/index/1212ningjie/yinzi. htm, 2006.
Real-time calculation model for vehicle emissions based on floating car data.
HAO Yan-zhao1*, SONG Guo-hua2,QIU Zhao-wen1, WANG Hong-tu3
(1.School of Automobile, Chang'an University, Xi'an 710064, China;2.School of Traffic and Transportation, Beijing Jiaotong University, Beijing 100044, China;3.Changchun Institute of Urban Planning and Design, Changchun 130033, China).
China Environmental Science, 2015,35(2):396~402
Floating car detection technology can collect data for single car, and the average speed in the data is continuous according to constant sampling interval. In view of this feature, a real-time emission model for light duty vehicles was established using road test data. In the process of modeling, one parameter of average speed increment (ASI) was applied to classify the average speed, and reflect emission changes under the same average speed. Compared with the test values,the calculation errors of the model are less than 10% for CO2, and are less than 15% for NOx, HC and CO. Further, a model application method was proposed, which can calculate the traffic exhaust pollutions in real time.
vehicle emissions;real-time calculation;floating car;average speed increment
X511
A
1000-6923(2015)02-0396-07
郝艳召(1981-),男,河北石家庄人,长安大学汽车学院讲师,博士,主要从事交通环境管理与控制研究.发表论文20余篇.
2014-05-28
国家自然科学基金(51208033,51478045);陕西省科技统筹创新工程项目(2012KTZB03-01);中央高校基本科研业务费专项资金(0009-2014G1221022)
* 责任作者, 讲师, haoyz@chd.edu.cn
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
军民两用技术与产品(2022年8期)2022-10-10
中学生数理化·八年级物理人教版(2020年9期)2020-11-16
中国外汇(2019年19期)2019-11-26
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
制造技术与机床(2017年9期)2017-11-27
现代职业教育·高职高专(2017年11期)2017-10-19
汽车维护与修理(2015年2期)2015-02-28
齐鲁周刊(2014年1期)2014-01-14
