基于LabWindows/CVI的舵机温度场测试系统
2015-11-15 05:12:56牛振,杨雷,张泓
航空兵器 2015年4期
牛 振,杨 雷,张 泓
(1.中国空空导弹研究院,河南 洛阳 471009;2.驻中国空空导弹研究院军事代表室,河南 洛阳 471009;3.空军驻黑龙江地区军事代表室,哈尔滨 150001)
0 引 言
舵机是导弹制导与控制系统的执行机构,它依据制导系统的控制信号,克服气动铰链力矩和弯曲力矩,驱动舵面以一定角速度偏转,产生控制力,改变弹体的飞行姿态,从而控制导弹的飞行轨迹。舵机在空中的工作性能直接影响导弹的战斗性能和制导精度[1]。
目前,国内的舵机温度场测试系统或是最大加载力矩太小,或是不能实现加载与空载之间的自动转换。本文设计的舵机温度场测试系统通过气动控制装置实现舵机的自动装夹与卸载以及力矩的自动加载与卸载,最大加载力矩70 N·m,四个通道可同时或独立加载,可以实时检测舵机的输出力矩,不需打开温箱,就能完成舵机在全温状态下的全部性能测试,并将测试结果实时显示在舵反馈曲线图的下面。
1 系统工作原理
系统的工作过程是在测控计算机的统一控制下完成的。系统的原理结构框图如图1 所示。在温箱达到设定的温度后,测控计算机首先设置舵机的工作电压,通过GPIB 接口发送控制命令给电源,为被测舵机供电,之后对舵机进行自检,在自检正常后开始性能测试。
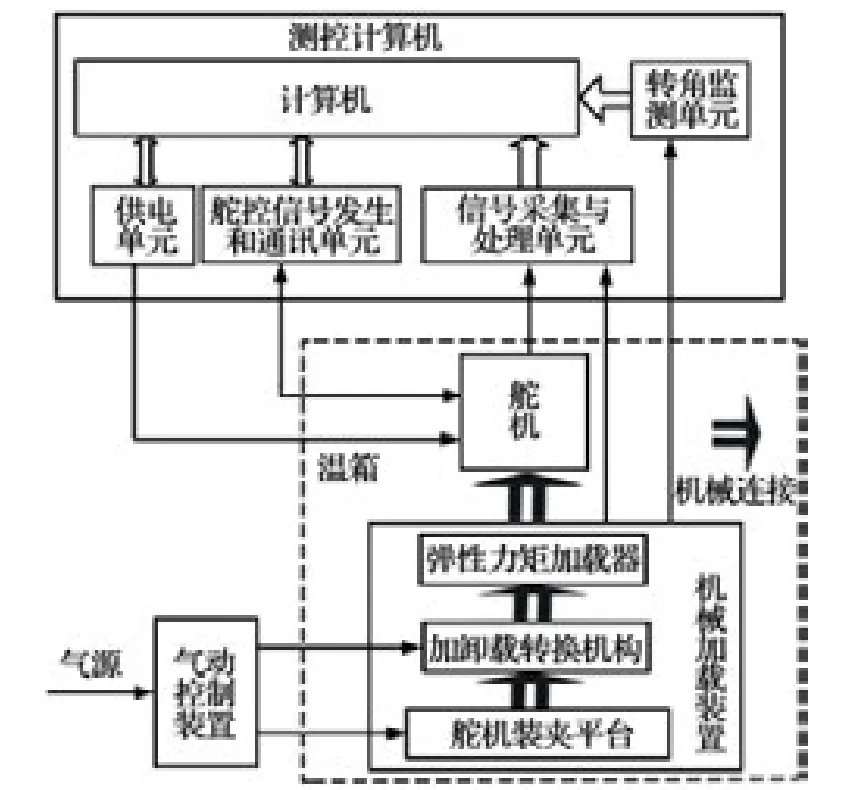
图1 系统原理结构框图
空载性能测试时,计算机通过舵控信号发生和通讯单元向被测舵机发出控制指令和测试任务对应的信号并通过数据采集单元接收舵反馈信息,然后将反馈数据绘制成舵机实际的运行曲线,同时进行空载角速度、相移、超调量、稳态误差等动态参数的计算并将结果显示在曲线图的下面,便于用户观察、分析和判断。
加载性能测试时,首先操作气动控制装置控制装夹平台完成舵机的自动装夹,然后控制加卸载转换机构完成指定力矩的加载,测控计算机向被测舵机发送加载测试任务对应的信号,接收舵反馈信息,绘制舵反馈曲线,将相应参数的计算结果显示在曲线图的下面,同时实时采集机械加载装置反馈的舵轴转角和力矩信息。
当全部测试任务完成后,系统通过GPIB 接口控制电源下电,同时通过气动控制装置完成力矩的卸载和舵机的装夹卸载,最后关闭温箱。
2 测控计算机设计
2.1 测控计算机硬件设计
测控计算机硬件是基于PXI 总线搭建而成的,PXI 总线是在PCI 及CompactPCI 基础上组合而成的一个构架,具有高达132 MB/s(32 bit,33 MHz)的峰值数据吞吐率。采用模块化设计方法,能够根据不同的测试对象和要求进行安装和拆卸,快速灵活地配置和搭建测试平台[2]。
由图1 可知,测控计算机主要由计算机、供电单元、舵控信号发生和通讯单元、信号采集与处理单元、转角监测单元组成。主要组成单元的构成及功能如下:
前瞻性纳入2015年6月—2017年2月汉中市中心医院收治的稳定期哮喘患者100例,均符合支气管哮喘防治指南(2016版)的诊治标准[6],并排除患有心脏病、肝病、肾病和代谢性疾病的患者。按随机数字表法平均分为观察组和对照组。本研究由汉中市中心医院伦理委员会批准实施,所有入组的患者均签署了知情同意书。
(1)计算机:整个系统的控制中心,通过GPIB 接口实现电源的程控开关与回读,通过PXI接口实现舵控指令的发送、舵反馈信息的采集以及力矩与转角信号的实时检测。由NI 公司的PXI-1042Q 机箱和PXI-8106 控制器组成[3]。
(2)供电单元:用于给舵机供电,有80 V 功率电源和27 V 控制电源。计算机通过GPIB 接口完成电压的设置输出和电压与电流的回读。
(3)舵控信号发生和通讯单元:输出舵机测试所需的舵控信号,接收舵反馈信号,通过多功能串口卡PXI-8433/2 实现计算机与舵机之间数字信号的通讯及信息交换。
(4)信号采集与处理单元:完成4 路模拟舵反馈信号和力矩信号的高速高精度采集及信号的隔离和差动/单边变换[4]。主要由NI 公司的多功能数据采集卡PXI-6259 实现,具有32 路输入和4路输出通道,单通道采样率高达1.25 MS/s[5]。
(5)转角监测单元:接收机械加载装置中光电编码器输出的4 路舵偏角脉冲信号,从外部监测舵机的实际工作状态,由定时/计数卡PXI-6602进行差动计数来实现。
2.2 测控计算机软件设计
2.2.1 多线程技术
LabWindows/CVI 将功能强大的C 语言与测控技术结合,具有灵活的交互式编程方法和丰富的库函数[6]。本文以LabWindows/CVI 作为软件开发平台,遵循模块化开发思想开发了测控计算机软件[7],该系统具有很好的扩展性。
测试软件是整个测试系统运行的中枢,在设计中采用了多线程技术,多线程是指操作系统支持一个进程中执行多个线程的能力。多线程程序使用主线程创建、显示并运行用户界面,次线程运行其他需要间歇处理的任务[8]。
软件含有完成不同功能的多个线程,将用户界面作为主线程,将数据采集、数据计算分析、数据实时显示作为次线程。由于舵机测试的不定时性,采用线程池来执行次线程中的代码。因此,在一段时间内能并行完成更多任务,既加快了系统的反应速度,又提高了执行效率[9]。
2.2.2 软件功能及流程
根据系统测试需求,采用模块化设计方法,软件测试流程如图2 所示。
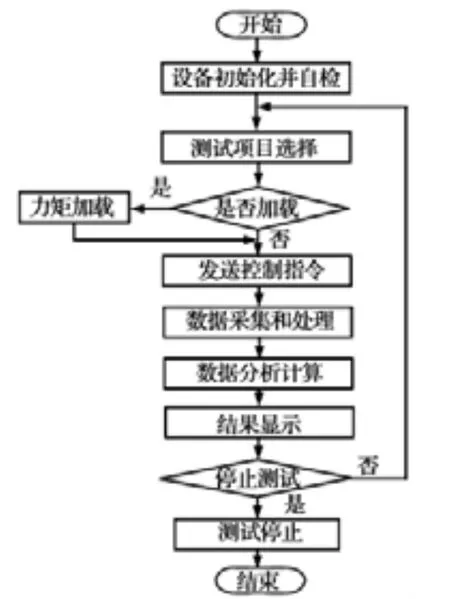
图2 软件测试流程图
软件主要功能如下:
(1)系统自检:对测控计算机硬件模块的功能、通道配置情况及可用性进行测试,以确保系统在舵机测试时所产生数据的有效性和可信性。
(2)测试信息设置模块:设置舵机编号、测试温度、湿度、测试人员与测试日期等信息。
(3)电源设置模块:设置控制电源和功率电源的输出电压以及输出保护电流等信息。
(4)舵机自检模块:完成舵机的自检,包括上电自检、地面自检和发射自检,初步对舵机的工作状态进行判断。
(5)性能测试模块:软件的核心部分,完成舵机空载和加载性能测试,测试项目有零位、角速度、稳态误差、频率特性和时域特性等,在测试的同时,检测加载力矩和舵轴转角信号,对舵机的实际工作状态进行判断。为了便于研究舵机在特定条件下的工作特性,可以根据实际需求,任意设置舵控信号的类型、幅值、频率和偏移。
(6)数据管理模块:性能测试时将舵反馈曲线和测试结果进行显示、记录、保存和打印输出。
3 气动控制装置设计
为了提高系统测试的自动化程度,设计了气动控制装置,为舵机的自动装夹、装夹卸载、力矩加载、力矩卸载以及力矩加卸载转换提供动力,其原理图如图3 所示,由开关阀、调压阀、安全阀、不锈钢管与压力表等组成。

图3 气动控制装置原理图
4 机械加载装置设计
利用机械加载装置模拟空中负载作用,实现对舵机的加载。该装置可以实现舵机的自动装夹、装夹卸载、力矩加载、力矩卸载以及加卸载测试之间的自动转换,同时输出加载力矩和舵轴转角信号。由装夹平台、加卸载转换机构、弓字弹性加载器、联轴器、力矩测试单元和光电编码器等构成,其结构示意图见图4。
(1)装夹平台:实现舵机的装夹固定与定位调整,由舵机工艺底座、胀紧套、拉杆轴、位置开关、直线轴承和夹紧气缸等组成。
(2)加卸载转换机构:实现力矩加载与卸载之间的自动转换,由气缸、离合器、推力杠杆拨叉、行程开关和行程开关支架板等组成。
(3)弓字弹性加载器:舵机加载测试的加载刚度为2.3 N·m/(°),精度为1%,同时温箱体积有限,温度变化范围较大,传统的一字加载器无法同时满足这些要求,本文设计的小尺寸弓字弹性加载器,弹性杆选用45CrNiMoVA 材料,同时进行特殊的工艺处理,大大提高了材料的应力特性。
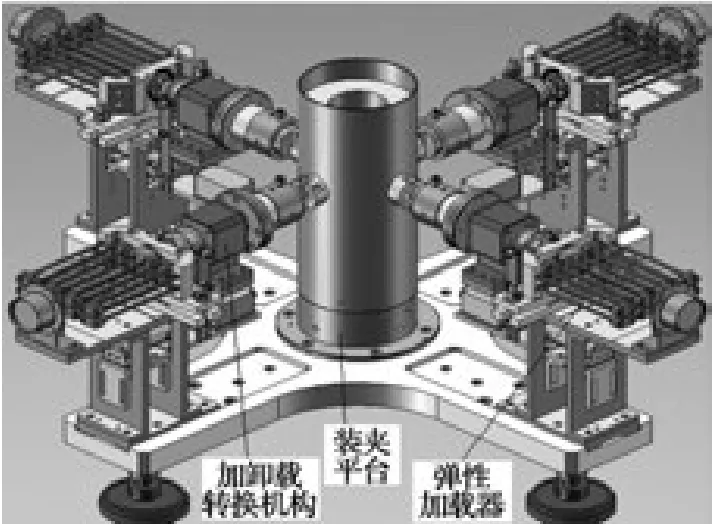
图4 机械加载装置结构示意图
该加载器由弹性杆、机架、主轴和联接板等组成。每通道有4 组共16 根弹性杆,杆长120 mm,直径5.6 mm,杆间距18 mm。加载测试时,弹性杆根部受力较大,将根部加粗,减少了应力集中。
5 系统应用与分析
系统设计完成后已被应用于多型号导弹舵机的研制,某型舵机在高温条件下的主要性能测试数据如表1 所示。其中,前3 项是在空载条件下的测试结果,其余均在加载条件下完成。
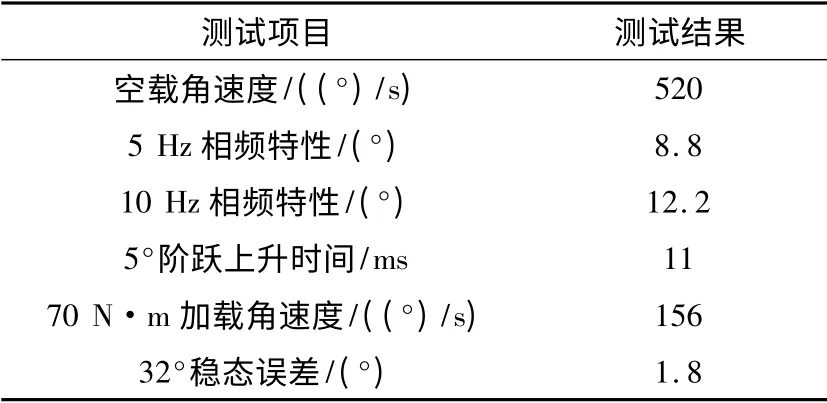
表1 舵机测试数据
6 结 论
基于LabWindows/CVI 的舵机温度场测试系统可以满足舵机高低温加载测试的需要,能更真实地模拟导弹在空中的工作环境,在地面研制阶段就能对舵机在空中的工作性能进行考核和验证。舵机试验表明:该系统性能优越、工作可靠、操作方便、自动化程度高,可为舵机研制提供有力保障。
[1]梁晓庚,王伯荣,余志峰,等.空空导弹制导控制系统设计[M].北京:国防工业出版社,2006.
[2]郑竑宇,董德新,贾明永.基于PXI 总线的红外导引头性能测试系统设计[J].航空兵器,2010(4):50-53.
[3]PXI Specification[M].PXI Systems Alliance,2000.
[4]赵弘,赵毅鑫.基于虚拟仪器的工业CT 无线自动加载测试系统[J]. 仪器仪表学报,2012,33(8):1753-1757.
[5]岳宏达,何卫国,曾漫.基于PXI 总线的舵机综合性能测试系统[J]. 计算机测量与控制,2013,21(9):2339-2341.
[6]庞丽娟,陶小亮.基于LabWindows/CVI 的测试设备设计与研究[J].国外电子测量技术,2014,33(6):78-80.
[7]孙晓云.基于LabWindows/CVI 的虚拟仪器设计与应用[M].北京:电子工业出版社,2010.
[8]杨志兴.基于合成仪器的频谱分析仪构建方法及实现[J].仪器仪表学报,2013,34(12):59-62.
[9]胡浩,李保刚.空空导弹发控综合测试系统设计与实现[J].电子测量技术,2014,37(11):75-79.
猜你喜欢
西安航空学院学报(2024年1期)2024-02-21 09:20:42
自动化学报(2019年6期)2019-07-23 01:18:36
制造技术与机床(2018年12期)2018-12-23 02:40:56
电子测试(2018年22期)2018-12-19 05:12:58
电子制作(2018年1期)2018-04-04 01:48:14
制造技术与机床(2017年4期)2017-06-22 11:18:31
制造技术与机床(2017年4期)2017-06-22 11:17:37
制造业自动化(2017年2期)2017-03-20 14:26:08
山东工业技术(2016年15期)2016-12-01 05:31:42
太空探索(2016年12期)2016-07-18 11:13:43