
自行高炮射击精度综合补偿技术研究
2015-11-11 07:17李魁武裴益轩霍勇谋
兵工学报 2015年2期
李魁武,裴益轩,霍勇谋
(西北机电工程研究所,陕西咸阳712099)
自行高炮射击精度综合补偿技术研究
李魁武,裴益轩,霍勇谋
(西北机电工程研究所,陕西咸阳712099)
为提高自行高炮射击精度,提出了提高高炮射击精度的综合补偿方法。基于武器系统组成,分析了影响自行高炮射击精度的主要因素及影响方式。在此基础上,结合火控闭环控制技术,根据火控解算误差相关性,建立误差综合补偿模型,利用火控解算前一时刻的误差特性,对后一时刻火控解算进行误差实时综合补偿,以提高射击精度。理论计算和试验数据分析表明,在不改变现有武器装备状态的情况下,该方法能提高自行高炮射击精度,验证了该方法的有效性。
兵器科学与技术;自行高炮;射击精度;误差分析;综合补偿算法
0 引言
现代战争中,空袭与反空袭的对抗直接影响着整个战役甚至战争的胜败。自行高炮武器系统具有机动性能好、自动化程度高、系统反应时间短、可全天候昼夜作战和行进间作战等特点,近程、高效的毁歼概率使其在现代近程防空作战中发挥着重要作用[1]。其中射击精度是保证自行高炮能否发挥有效作用的关键技术之一。
自行高炮与射击精度相关的单体主要有火力系统、搜索跟踪系统、火控计算机、火炮随动系统、导航姿态装置、底盘系统等[2]。单纯提高各单体精度不仅存在技术上的难度,还会引起装备成本的大幅提高,降低系统作战效费比[3]。以火力系统为例,火力系统设计[4-6]完成后,一般已达到现有技术的最高水平,要减小火力误差提高射击精度,结构变化对系统总体方案设计的影响大,且需要进行大量的试验验证,难度较大。但火控系统的改进优化[7-8]对总体方案设计影响较小,增加很少的硬件甚至在硬件不变的情况下通过对软件设计的改进优化,即能减小火控误差,有效提高自行高炮射击精度。
这就迫使人们从自行高炮火控总体角度出发,探讨新的原理,研究在现有单体状态条件下,通过减小火控误差来提高自行高炮射击精度的方法。本文通过对影响自行高炮射击精度的主要因素进行分析,提出误差实时综合补偿的方法对火控系统进行改进优化,以提高自行高炮的射击精度。
1 影响自行高炮射击精度的主要因素
1.1影响射击精度的因素
通过对与自行高炮射击精度相关的单体因素进行分析,可以认为自行高炮射击误差主要是由火控误差和火力误差引起的[2]。自行高炮火控误差主要包括目标探测误差、瞄准线稳定误差、火控解算误差、射击线稳定误差和随动误差。火力误差是由多种因素引起的,其中射击过程中的不平衡力矩及频谱特性是使火力误差变大的主要原因。
由于高炮一次点射的时间很短(不大于2 s),火力的系统误差经过修正可以消除,而火控误差有很强的相关性。因此,在一次射击中,火控误差是引起高炮射击系统误差的主要因素,而系统误差对射击毁歼概率影响最大[2]。
1.2火控误差分析
通过对典型高炮武器实测试验数据的分析,可以发现火控射击诸元误差具有很强的相关性,在一定时间范围内呈线性变化的趋势,如图1所示。
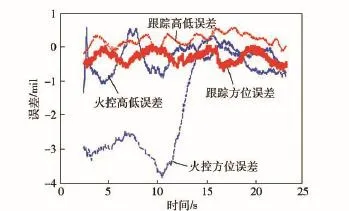
图1 火控射击诸元误差曲线Fig.1 FCU firing data error curves
结合自行高炮设计指标和现代火控技术现状,对图1中的火控误差进行分析,可以得到:目标跟踪精度越来越高,跟踪的系统误差一般不大于0.4 mil,约仅占射击诸元误差的1/5,跟踪误差对射击精度的影响较小;火控计算中普遍采用射表直接插值计算射击诸元,其射表误差可忽略不计;现代高炮一般装有炮口测速装置,且随着气象条件测量的精度越来越高,而小高炮射程又较近,因此,弹道气象误差对小高炮脱靶量的影响很小;随着现代控制技术的发展,火炮随动系统的精度不断提高,火炮随动误差已不再是影响武器系统脱靶量的主要因素。由此可见,现代火控射击诸元误差主要是由目标运动假定与目标实际运动规律不一致引起的,且随着预测时间的增加,射击诸元误差呈近似线性变化趋势。
1.3自行高炮射击精度控制方法
为了提高自行高炮的射击精度,传统的方法是在系统内各单体以及各单体之间采用闭环反馈校正的工作原理。目前跟踪系统精度特别是光电跟踪精度已达到极限,且在此基础上提高跟踪精度对提高射击精度的影响不大。有效方法是火控系统采用大闭环控制原理,加入弹目偏差检测装置,实时求取武器系统的脱靶量,实现对射击效果的反馈校正。
大闭环火控系统具有精度高、毁伤概率高、系统效能好等优点,但在自行高炮上加入弹目偏差检测装置会引起装备成本的大幅增加,不能满足我国装备的实际需求。那么在不增添弹目偏差检测装置,少量增加成本的条件下,是否还有其他的路可走呢?考虑火控解算误差的相关性,火控误差可以采用实时补偿的方法进行部分修正。为此,本文提出误差实时综合补偿的方法,在火控大闭环控制技术的基础上,结合现代自行高炮工程实际,采用误差实时综合补偿技术,提出降低高炮对空射击系统误差的方法,实现误差综合补偿技术的工程化。
2 射击精度综合补偿方法
2.1自行高炮射击诸元解算
自行高炮一般对付的是高速运动的空中目标,为使高炮弹丸在空中与目标相遇,火控系统要根据目标的运动规律解算火炮射击诸元。高炮解命中问题就是寻找目标未来点位置,使弹丸从高炮位置飞到目标未来点位置的时间与目标从目标现在点c位置飞到目标未来点q位置的时间相等。
在直角坐标系下,假定目标匀速或匀加速运动,则火控解命中方程组可以写成如下形式:
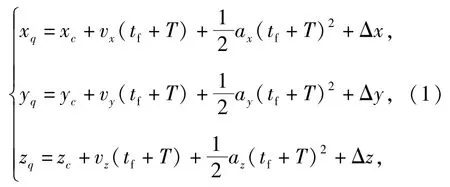
式中:xc、yc、zc为目标现在点坐标分量;xq、yq、zq为目标未来点坐标分量;vx、vy、vz为目标相对于高炮的速度分量;ax、ay、az为目标加速度分量;T为输出延迟时间;Δx、Δy、Δz为基线修正分量;tf为弹丸飞行时间,它是目标未来点坐标的函数。
射击诸元的计算公式如下:
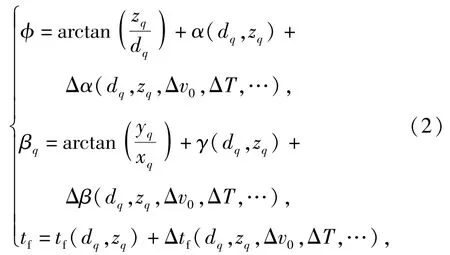
式中:φ为火炮射角;βq为火炮方位角;α(·)为高角;Δα(·)为高角修正量;γ(·)为偏流;Δβ(·)为方位角修正量;tf(·)为基本弹丸飞行时间;Δtf(·)为弹丸飞行时间修正量;zq、dq分别为目标未来点高度和水平距离。
为计算射击诸元误差,首先计算其脱靶量。
假定在某一时刻t发射了一发炮弹,其射击诸元为(βq,φ,tf),弹丸飞行时间tf的目标未来点坐标为
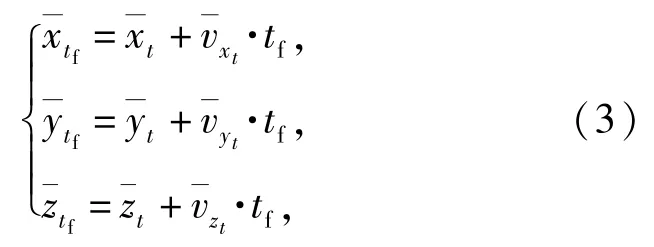
高炮火控解算为弹丸精确命中目标,理想条件下,在t+tf时刻射弹弹丸的位置坐标可以认为是目标未来点的位置坐标.根据射角、弹丸飞行时间和弹道条件,查射表可以获得射弹在该点的存速vc和倾角θc.在t+tf时刻,极短时间Δt内,弹丸可近似看作为匀速运动,则弹丸的运动方程可以写成:
式中:Δt为描述t+tf时刻弹丸运动状态引入的时间变量;vcx=vc·cos θc·cos βq;vcy=vc·cos θc·sin βq;vcz= vc·sin θc.
在t+tf时刻,通过对跟踪系统当前及以前跟踪探测值的处理可以获得在时刻t+tf的真实目标位置坐标及其速度矢量,则目标的运动方程可以写成

不同时刻射弹与目标距离的计算公式为

脱靶量可以定义为射弹与目标的最小距离,即ΔD的最小值。将(4)式和(5)式代入(6)式,令


推导可得弹丸与目标距离最小时刻与未来点预测时刻的时间差Δtmin满足(8)式。
代入方程(4)式和(5)式,可得t+tf+Δtmin时刻射弹位置坐标(xpt,ypt,zpt)和目标位置坐标(xtt,ytt,ztt),则射击诸元误差的计算公式为

通过多次运算,可以获得不同时刻t1,t2,t3,…,tk的射击诸元误差(Δβqi,Δφi).通过对这些误差的处理,可以预测未来时刻的射击误差,通过误差补偿可以提高自行高炮射击精度。
由公式推导可以得到,火控解算射击诸元误差主要是由目标运动预测误差引起的,预测时间越长、误差越大。缩短预测时间,理论上可以提高射击诸元精度,这也是一般高炮初速较高、尽量减少弹丸飞行时间的原因。通过不同时刻对同一时刻目标未来位置的预测数据对比,可以得到前一时刻的误差特性,根据一定时间内的火控误差相关性,通过对后一时刻的误差综合补偿,可以达到提高高炮射击诸元精度的目的。
2.2射击精度实时综合补偿算法
实时综合补偿火控系统的原理是基于跟踪系统具有较高的精度,能够真实地记录目标的运动轨迹,认为是目标运动轨迹的准真值,通过处理可以得到相应的射击诸元准真值。而火控计算机同时进行常规的解命中计算,同时把得到的射击诸元准真值引入火控计算机中进行比较可以得到脱靶量。根据火控射击诸元误差的相关性,通过实时修正改变射击方向,减小弹目偏差,对射击诸元进行实时修正。
假定在某一时刻t,根据跟踪系统获得的目标跟踪值精确计算获得火炮诸元为(βq,φ,tf),用E标示,而在t-tf时刻火炮的实际射角为E′,令

式中:ΔE为t-tf时刻射击与t时刻射击(弹丸飞行时间为0)的射击诸元误差,即虚拟的射击脱靶量。
鉴于射击诸元误差一定时间内具有较强的相关性,在t-tf时刻射击诸元误差为ΔE的条件下,t时刻的射击脱靶量应在ΔE附近变化,通过适当修正可以提高t时刻的射击精度。如图2所示,通过火控计算,可以获得Ti时刻目标平滑值Mi、目标运动速度vi及加速度ai,通过解命中方程可以获得射击诸元Eii及弹丸飞行时间tfi.同样,在Tj(Tj=Ti+dt,0<dt≤tf)时刻也可以获得获得Tj时刻目标平滑值Mj、目标运动速度vj及加速度aj,依此数据预测Ti+ tfi时刻目标位置,计算射击诸元Eij,由于预测时间由tfi减少到tfi-dt,射击诸元Eij精度将高于射击诸元Eii精度。假定根据目标跟踪值计算的射击诸元真值为Eit,满足:


图2 火控实时综合补偿原理图Fig.2 Schematic diagram of FCU real-time comprehensive compensation
图2中:L为目标运动航路;G为高炮位置;Mi为Ti时刻目标现在点;vi、tfi、Mqii分别为Ti时刻预测的目标速度、弹丸飞行时间、预测的未来点Ti+tfi时刻目标位置;Mj为Tj时刻目标现在点;Mqij为Tj时刻预测的Ti时刻未来点Ti+tfi时刻目标位置;vj、tfj、Mqjj分别为Tj时刻预测的目标速度、弹丸飞行时间、预测的未来点Tj+tfj时刻目标位置。
射击诸元误差具有较强的相关性,在Ti时刻射击诸元误差为ΔEij的条件下,Tj时刻的射击诸元误差应在ΔEij附近变化,通过适当修正可以减小Tj时刻的射击诸元误差。假设在Ti到Tj时刻的短时间内射击诸元误差呈线性关系,则Tj时刻对Ti时刻射击诸元误差的预测值ΔEij可以表示为

通过对新研的几型自行高炮武器系统设计定型试验大量实测数据的统计分析,火控射击诸元误差的衰减系数ρ在范围内变化,取比例系数C为0.4~1.0,则在Tj时刻射击诸元的修正量δEij可用下述公式计算:

此外,自行高炮在使用过程中,系统轴系一般均存在一定的固定误差δS,火力射击也存在一定的系统误差δG,由此可以得出在Tj时刻实时综合补偿的修正量为

式中:系统轴系误差δS可通过轴系检查获得;火力射击的系统误差δG可通过射击固定目标获得。
3 综合补偿算法仿真分析
根据试验录取的3组历史航路数据,分别利用原预测方法和本文提出的综合补偿算法计算射击诸元,通过比较采用误差综合补偿技术前后的高炮系统误差统计结果来验证采用高炮系统误差综合补偿技术的效果。
某一组数据某段弹丸飞行时间内的方位和高低方向的预测值曲线如图3所示,采用的实时综合补偿算法比例系数C为0.50,与原预测方法相比,有效提高了方位和高低方向的射击诸元预测精度,证明了该方法的有效性。
表1为利用某自行高炮3条航路数据采用误差实时综合补偿技术后的方位和高低系统误差统计结果。其中在采用误差实时综合补偿技术前火控解算对3条航路的火控解算方位和高低系统误差分别为:(-0.22 mil,1.70 mil)、(-0.32 mil,0.76 mil)、(-0.22 mil,1.70 mil),通过采用实时综合补偿技术,调整补偿系数和补偿时间,火控方位和高低解算精度可以大大的提高,采用高炮系统误差实时综合补偿技术对提高自行高炮射击精度效果是非常明显的。

图3 射击诸元预测值曲线Fig.3 Firing data calculation value curves

表1 实时综合补偿后系统误差统计Tab.1 System error statistics after using real-time comprehensive compensation method
4 结论
本文分析了影响自行高炮射击精度的主要因素,重点研究火控误差对射击精度的影响,提出了误差实时综合补偿方法,建立提高自行高炮射击精度的误差综合补偿模型,实时对火炮指向进行修正,减小火控误差,达到了提高自行高炮射击精度的目的。在国内尚不能很好地解决小高炮脱靶量检测手段的情况下,误差实时综合补偿技术的应用可有效提高自行高炮的射击精度,适应未来近程反导需求,增强高炮武器系统对小型目标的作战能力,提高我军防空作战水平。
(
)
[1]DoD Architecture Framework Working Group.DoD architecture framework version 2.0[R].US:Department of Defense,2009.
[2]李魁武.现代自行高炮武器系统总体技术[M].北京:国防工业出版社,2012. LI Kui-wu.Modern antiaircraft weapons system overall technical[M].Beijing:National Defense Industry Press,2012.(in Chinese)
[3]肖元星.地面防空武器系统效费分析[M].北京:国防工业出版社,2006. XIAO Yuan-xing.Effectiveness-cost analysis on land-based air defense weapon system[M].Beijing:National Defense Industry Press,2006.(in Chinese)
[4]康新中,马春茂,魏孝达.火炮系统建模理论[M].北京:国防工业出版社,2003. KANG Xin-zhong,MA Chun-mao,WEI Xiao-da.Modeling theory of gun system[M].Beijing:National Defense Industry Press,2003.(in Chinese)
[5]李魁武,黄克,程广伟,等.外能源转管自动机机电耦合动力学键合图建模及应用[J].火炮发射与控制学报,2013(1):16-19. LI Kui-wu,HUANG Ke,CHENG Guang-wei,et al.The modeling and application of bond graph for external energy galting machine electro-mechanical coupling dynamics[J].Journal of Gun Launch&Control,2013(1):16-19.(in Chinese)
[6]李魁武,曾志银,宁变芳,等.液压自紧身管残余应力随实弹射击的变化规律研究[J].兵工学报,2012,33(11):1298-1302. LI Kui-wu,ZENG Zhi-yin,NING Bian-fang,et al.Research on residual stress of hydraulic autofrettaged barrel in practice firing[J].Acta Armamentarii,2012,33(11):1298-1302.(in Chinese)
[7]郭治.现代火控理论[M].北京:国防工业出版社,1996. GUO Zhi.Modern fire control theory[M].Beijing:National Defense Industry Press,1996.(in Chinese)
[8]刘锐.分布式数字化牵引高炮火控系统分析与实现[D].南京:南京理工大学,2009. LIU Rui.Research on fire control system of distributed digital traction antiaircraft[D].Nanjing:Nanjing University of Science and Technology,2009.(in Chinese)
Research on Firing Precision Comprehensive Compensation Method of Self-propelled Anti-aircraft Gun
LI Kui-wu,PEI Yi-xuan,HUO Yong-mou
(Northwest Institute of Mechanical and Electrical Engineering,Xianyang 712099,Shaanxi,China)
To improve the firing precision of self-propelled anti-aircraft gun,a real-time comprehensive compensation method is proposed.The main factors effecting on the firing precision of anti-aircraft gun and the influence principle are discussed based on the weapon system structure.On the basis,an error comprehensive compensation model is built by combining with closed loop fire control method for the relevance of the fire control resolving error,and the previous fire control resolving error character is used to compensate the following fire control resolving error to improve firing precision.The theoretical computation and test data show that the proposed method can be used to improve the firing precision of self-propelled anti-aircraft gun in the case of the original weapon equipment state.
ordnance science and technology;self-propelled anti-aircraft gun;firing precision;error analysis;comprehensive compensation method
E924.5
A
1000-1093(2015)02-0214-06
10.3969/j.issn.1000-1093.2015.02.004
2014-11-18
总装备部预先研究项目(404040602)
李魁武(1943—),男,研究员级高级工程师,博士生导师。E-mail:lkwmxw@126.com
猜你喜欢
小学生必读(中年级版)(2021年12期)2021-12-02
军事文摘(2020年15期)2020-08-15
兵器装备工程学报(2020年3期)2020-04-22
弹箭与制导学报(2018年5期)2018-02-21
北京航空航天大学学报(2017年4期)2017-11-23
现代兵器(2017年4期)2017-06-02
中学生理科应试(2017年2期)2017-04-01
弹箭与制导学报(2015年1期)2015-03-11
装备环境工程(2015年5期)2015-02-28
