帽儿山老爷岭野外实习路线的三维数字化
2015-11-08 02:06苏健民刘人硕高辉郭永双邱兆文
重庆理工大学学报(自然科学) 2015年4期
苏健民,刘人硕,高辉,郭永双,邱兆文
(东北林业大学信息与计算机工程学院,哈尔滨150040)
帽儿山老爷岭野外实习路线的三维数字化
苏健民,刘人硕,高辉,郭永双,邱兆文
(东北林业大学信息与计算机工程学院,哈尔滨150040)
使用三维数字化技术对帽儿山老爷岭野外实习路线进行三维扫描,获取三维点云数据,然后将实习路线的点云数据进行数字化,实现实习路径的虚拟漫游。该方案代替了传统的野外实习方法,取得了良好的效果。研究结果表明:三维数字化技术在模拟林业信息方面具有较好的效果,在科学研究和教育实习方面有良好的应用前景。
三维扫描;数字化;点云;虚拟漫游
帽儿山国家森林公园境内的天然次生林、人工林、森林湿地、溪流、草地及农林交错带等生态系统不仅面积较大,而且在东北地区具有很强的典型性和代表性。该地区属温带大陆性季风气候,四季分明,可依据季节特点开展不同内容的生物学野外实习。帽儿山老爷岭生态站是国家科技部首批野外科学观测研究站之一,主要植被类型是阔叶红松林经过不同程度的干扰后形成的东北东部山区典型的温带天然次生林,林中分布着胡桃楸、水曲柳和黄檗等重要保护树种,以及紫椴、色木槭等经济树种。林区内动植物种类丰富,适合开展植物学、生态学等多学科野外实践教学。
随着信息技术的不断发展,涌现了大量的新兴技术[1],其中的三维数字化技术具有良好的实用价值和应用前景,解决了现实中对物体细节纹理处理不精细的难题,可详尽地还原物体的形状与外貌。本文使用三维数字化技术对帽儿山老爷岭实习路线进行建模[2]和虚拟化[3],将森林公园制作成一个虚拟的可用来展示的真实模型[4],学生可在计算机上自由查看实习路线上的林木形态、植被的生长地理环境、植物的种类等信息,使学生告别传统的实习方法。如何使用虚拟现实[5]的教学手段充分利用老爷岭丰富的林业资源是本文的研究重点。
1 三维激光扫描系统原理
三维激光扫描系统作为测绘界的一项技术革新,在简化繁杂的工作程序的同时丰富了测绘的效果,极大地提高了测量效率和准确率。它由三维激光扫描仪、计算机、电源供应系统、支架以及配套的软件构成。三维激光扫描系统围绕三维数据和激光信号[6-9]这两个特性进行物体数据的测量,其工作过程是不断地重复发出激光信号,然后将反射回来的光学信号收集起来。这些激光信号由具有分辨率的空间点构成,将这些点汇集起来,就得到测量物体的表面色彩和三维数据信息。
激光测距技术是三维激光扫描仪的主要技术,激光测距技术[10]的4种不同方法是基于脉冲测距法、相位测距法、激光三角法和脉冲-相位式测距法。目前,大型测绘领域使用基于脉冲的测距方法,小型物体近距离使用的扫描仪则采用相位干涉法[11]和激光三角法。
相位式扫描仪发射一束不间断的整数波长的激光,通过计算物体反射的激光波的相位差来计算和记录目标物体的距离。基于相位测量原理[12],其扫描范围通常在100 m之内,精度可达到毫米级,所以相位式扫描仪主要用于中等距离的扫描测量系统中。由于帽儿山实习路线三维数字化需要较高的精度来虚拟展示植被的纹理细节,所以使用相位干涉法进行扫描。
2 三维激光扫描仪
目前最具代表性的三维激光扫描仪生产公司有瑞士的Leica公司、美国的Trimble公司和FARO公司。本研究使用Trimble TX5三维激光扫描仪,后期处理采用Trimble RealWorks三维后处理软件。仪器的具体参数见表1。
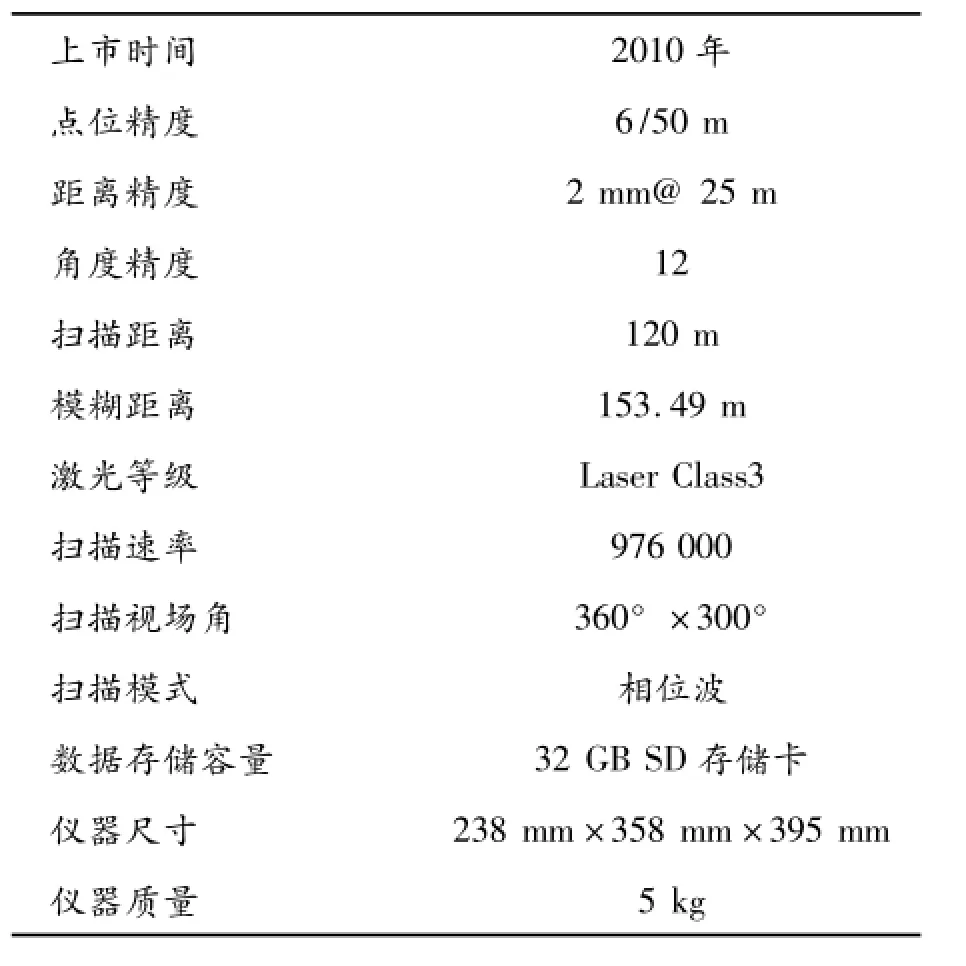
表1Trimble TX5参数设置
3 实例研究
本研究的目标是在特定季节将实习路线完整如实地记录下来,然后结合软件操作将得到的数据进行数字虚拟化以供教学展示使用。使用三维激光扫描技术记录林场信息同传统记录方式相比有着极大的优势,测绘人员可在不破坏当地稀有植被的情况下完成对数据的记录工作,并可根据对精度的需求自行调节工作的效率,降低了对人员配置的需求。帽儿山老爷岭三维数字化的具体实验内容包括:
1)准备工作
首先,根据项目需求确定老爷岭实习路线需要扫描的距离、在扫描路线上需扫描站点的大概位置及数量、在扫描站点记录的植被范围。然后,进行详细勘查以确定待扫描测站的具体位置和扫描所需标靶的安放位置。当待测物体体积过大而无法一次性扫描时,扫描所得的数据将面临拼接处理,这就涉及拼接特征点的选取,故为了数据拼接的准确性需要人为地设置球型标靶。之后,架设三维扫描仪选取合适的参数配置,结合扫描站点与站点之间的距离以及每一站所扫描的范围确定分辨率的大小。由于仪器电源为蓄电池,受电量不可持续的限制,故选择中等的分辨率,这样可以保证整个实习路径扫描的效率,并减少后期数据处理时的工作量。
2)实习路线点云数据获取
获取老爷岭实习路线的点云数据是项目实施过程中最重要的一环。获取高精度、高质量的点云数据是后续数据处理与实现三维数字化漫游的基础。使用Trimble TX5三维激光扫描仪进行机载控制,在测站直接进行点云数据的获取。在获取树木点云数据前设置扫描密度为中等,并记录扫描时对应的高清真彩图像,以便于后续的数字化建模工作。扫描实习路线数据的过程大致可分为以下3个步骤:
步骤1配置仪器。主要完成扫描仪的准备工作,例如安装电源电池、连接仪器、安放扫描仪、固定扫描仪位置等。准备工作耗时较少。打开扫描仪后对扫描仪参数进行设置,包括工程文件名、文件保存位置、扫描范围、分辨率、标靶类型等。
步骤2进行扫描。在扫描过程中可以查看植被三维数据的扫描进程,如果出现不清晰、光线变化跨度大等问题则需要及时修正或停止扫描。扫描结束后检查获得的植被数据,如果不合规格则重新进行扫描。做好整个扫描进程的观测记录。
步骤3更换观测站扫描。结束当前观测站的扫描后,检查无误便可进行下一观测站的扫描任务,此时重复前两个工作步骤。
3)实习路线点云数据处理
采用Trimble RealWorks三维后处理软件进行点云数据的处理。由于实习路线较长,工作量较大,时间紧张,且精度要求较高,所以使用标靶拼接的方式进行数据拼接,可提高数据处理的速度与精度。将Trimble TX5三维激光扫描仪获得的帽儿山实习路线点云数据连接Trimble RealWorks后期处理软件可见,记录的点云数据形式是黑白色的点云图像(如图1(a))。将局部放大看到的则是众多的点组成的图像,见图1(b)。从图中可以清楚地看到植被的叶片形状和树木的枝干细节。
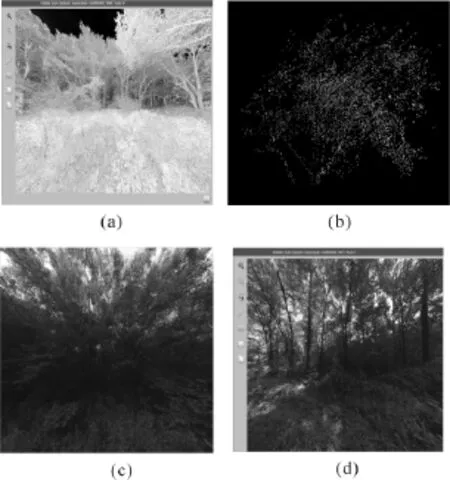
图1 帽儿山实习路线点云图像
三维激光扫描仪在扫描过程中会实时地记录所扫数据的高清图片,然后将高清图片上的色彩信息映射到激光点云数据上得到和实物相一致的三维模型(见图1(c),(d)),并且可以对模型进行随意的旋转和放大,观察植被的纹理细节。
三维点云数据的处理大致可以分成两个方面:
①数据的配准与优化。数据的配准主要是将点云数据的坐标进行配准,并进行点云数据的拼接。坐标纠正时,通常先使用配对方式进行两幅图的坐标转换,然后在全局范围内将多个测站的点云数据和标靶点进行组合,最后将整个点云图坐标纠正到测站所在的真实地理坐标上,完成实际坐标配准[13]。
②点云数据拼接分为3个步骤:首先是标靶拼接,将扫描区域的多个标靶ID精确对应进行拼接;然后是点云拼接,保证点云拼接时有足够的点云公共部分,并保证公共部分的质量,在重叠的部分找到共用的点,一一对应,完成拼接;最后是控制点的拼接,使用全站仪或GPS技术对公共区域的控制点大地坐标进行记录,之后采用和标靶拼接类似的方式对点云数据进行拼接,进而将所有点云数据转换到工程实际坐标系中[14-18]。从图2可以看到一些白色的圆形斑点,这些斑点就是实际实习路线点云扫描时标靶的放置位置。

图2 实际实习路线点云扫描时标靶的放置位置
通过标靶位置进行图像的处理可得到清晰、高精度的模型信息。由于是站点之间的点云数据拼接,在进行数据拼接时也会留下一定的误差信息,如图3(a)所示的拼接缝隙对拼接处的植被细节就会产生影响。在扫描点云数据时,由于天气的原因也会造成站与站之间点云数据光线分布不均匀等问题,进而影响拼接效果,如图3(b)所示。

图3 拼接缝隙对拼接处的植被细节影响
图3(b)中黄色的三角形点是每一次点云数据获取时的测站位置,双击黄色测站点可进行测站之间的转换。Realworks使用网页浏览器进行操作,可在网页上实现虚拟漫游。
4)三维数字化模型研究
三维数据不仅可在计算机上虚拟展示,还可将实验人员扫描的运动过程虚拟化,制作成虚拟漫游展示的视频。例如图4就是帽儿山实习路线虚拟漫游的视频截图。

图4 帽儿山实习路线虚拟漫游视频截图
4 结束语
目前三维激光扫描技术在林业应用方面还处于探索阶段。将三维扫描技术应用于帽儿山老爷岭实习路线,数字化整个实习路线,在实习教学中实现了虚拟漫游,提高了学生在实地考察时的学习效率。通过对实验的不断完善可达到取代野外实习的目的,不仅提高了效率,而且保护了实习区域的生态环境。
实验中阳光不定时的变化、自然风力的影响、点云拼接时所产生的拼接缝隙等问题限制了三维激光扫描技术在林业方面的应用,这些都是后续研究需要解决的问题。
[1]王芳.三维激光扫描仪在林木测量方面的应用[J].测绘通报,2011(11):84-92.
[2]石银涛,程效军,贾东峰.三维激光扫描树木模型在林业中的应用[J].测绘通报,2012(3):40-46.
[3]范海英.三维激光扫描数据在林业测量中的处理研究[J].城市建设理论研究:电子版,2013(2):29-34.
[4]赵芳,韦雪花,高祥.三维激光扫描系统在建立单株立木材积模型中的研究[J].山东农业大学学报,2013,44(2):231-238.
[5]卢康宁,张怀清,刘闽.基于三维激光扫描技术的树木建模研究[J].林业实用技术,2012(5):55-62.
[6]郑君.基于三维激光扫描技术的单木量测方法研究与实现[J].北京林业大学,2013(6):70-76.
[7]高自强,王忠仁.三维激光扫描树干提取与建模研究[J].测绘与空间地理信息,2012,35(7):43-50.[8]李南,邵毅全.激光扫描技术在信息资源数字化进程中的作用[J].激光杂志,2013(2):48.
[9]梁丽.激光扫描在笔腔三维重建及测量中的初步应用[J].激光杂志,2013(2):59-61.
[10]王玉鹏,卢小平,葛晓天,等.地面三维激光扫描点位精度评定[J].测绘通报,2011(4):10-16.
[11]张立富,吕东方,袁明,等.3d激光扫描技术及其在森林测绘中的应用研究[J].林业机械与木工设备,2011,39(8):40-46.
[12]蒋定定,王长力,王玉菊.三维激光扫描与虚拟现实技术[J].电子世界,2012(6):30-36.
[13]陈良良,隋立春,蒋涛.地面三维激光扫描数据配准方法[J].测绘通报,2014(5):80-86.
[14]刘伟乐,林辉,孙华.基于地面三维激光扫描技术的林木胸径提取算法分析[J].中南林业科技大学学报,2014(2):50-56.
[15]刘刚,司永胜,冯娟.农林作物三维重建方法研究进展[J].农业机械学报,2014,45(6):32-38.
[16]王传宇,郭新宇,吴升.基于计算机视觉的玉米果穗三维重建方法[J].农业机械学报,2014,49(9):77-82.
[17]谢丽琼,张晓丽,李明.基于CBERS-02B数据的森林三维绿量测算[J].西北农林科技大学学报,2014,42(6):65-72.
[18]苏喜友,龙洁.木本植物三维可视化生长模型与林业生产[J].西北林学院学报,2014,22(5):204-228.
(责任编辑杨黎丽)
Three-Dimensional Digitizing of Field Practice Route at Maoershan Laoyeling
SU Jian-min,LIU Ren-shuo,GAO Hui,GUO Yong-shuang,QIU Zhao-wen
(College of Information and Computer Science,Northeast Forestry University,Harbin 150040,China)
Using the three dimensional(3D)digital technology to scan field practice route of Maoershan Laoyeling,we got the 3D point cloud data.Then we digitized the practice route point cloud data and realized virtual roaming of the practice path.Instead of traditional method of field practice,we obtained good teaching effect.Research shows that the 3D digital technology has a pretty good effect on simulation of forestry information and can bring very good application foreground for scientific research and education practice.
three dimensional scanning;digitization;point cloud;virtual roaming
TP273
A
1674-8425(2015)04-0073-04
10.3969/j.issn.1674-8425(z).2015.04.014
2015-02-06
黑龙江省留学归国人员基金资助项目(LC2012C06)
苏健民(1960—),男,教授,主要从事自动控制、信号与信息处理、三维数字化研究;通讯作者邱兆文(1974—),博士,副教授,主要从事信息检索、机器学习、三维数字化研究。
苏健民,刘人硕,高辉,等.帽儿山老爷岭野外实习路线的三维数字化[J].重庆理工大学学报:自然科学版,2015(4):73-76.
format:SU Jian-min,LIU Ren-shuo,GAO Hui,et al.Three-Dimensional Digitizing of Field Practice Route at Maoershan Laoyeling[J].Journal of Chongqing University of Technology:Natural Science,2015(4):73-76.
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
文萃报·周五版(2021年45期)2021-11-17
数学小灵通·3-4年级(2020年11期)2020-12-14
数学小灵通·3-4年级(2020年3期)2020-06-24
模具制造(2019年3期)2019-06-06
测绘通报(2017年2期)2017-03-07
小学生导刊(低年级)(2016年8期)2016-09-24
世界博览(2015年20期)2015-09-10
现代营销·经营版(2015年3期)2015-04-20
大地测量与地球动力学(2014年3期)2014-02-13