基于VB开发环境的机械臂可视化研究
2015-11-07 08:52:46汤妍
中国科技信息 2015年24期
汤 妍
基于VB开发环境的机械臂可视化研究
汤 妍
本文运用DH参数法在Visual Basic软件中搭建运动学正解、逆解求解界面,在界面中动态演示出相应的机械臂运动过程。加快运动学求解的同时,在机械臂投入流水线生产前,可视化的展现流水线生产过程,暴露瑕疵,对于生产各个环节具有参考意义。
机械臂是由首端固定、末端安装执行装置而其他各个关节的平移旋转构成。
目前,在食品包装、医药、电子和光伏、玻璃制品精加工等行业中,机械臂均得到了广泛的应用。其中机械臂在生产作业中的应用,节省了人力、物力。尤其针对于一些精密器件,全机械化更有益于器件的精确操作和保存。机械臂的使用同时也降低了生产成本和事故风险,发展前景广阔。
大多机械臂可视化生成程序在VC中实现,但VC掌握、熟练应用难度大,涉及的尖端技术成本过高,对于国内的低成本应用开发者来说,可行性有限。Visual Basic软件的优势在于:无繁琐定义、面向对象和容易掌握。因此本界面采用了VB软件来实现机械臂可视化生成的研究,力求在模拟设计和仿真研究方面简化工作量,节约时间和成本。
VB软件仿真结果显示,此动态机械臂的可视化生成界面,可在多机械人手臂投入使用前,把机器人正、逆解结果直观通过矩形框的运动展示出来,有利于在投入生产之前提前暴露并修补瑕疵。
机械手臂的坐标变换
坐标变换是用来描述任意的一点从一个坐标系投影到另一个坐标系的变换关系。机械手臂的运动涉及坐标转换,这就需要对零件、工具本身的位置和姿态进行描述。
机械臂坐标的变换分为:
平移变换
旋转变换
平移变换与旋转的结合。
(1)平移坐标变换
平移前后的坐标系方位相同,原点不同。AP 表示坐标
B0系{B}相对于坐标系{A}的位置关系。在坐标系{B}中,若点P的位置为BP ,那么点P在坐标系{A}中的坐标AP :

(2)旋转坐标变换
设有原点相同,方位不同两坐标系。
AR为旋转矩阵即坐标系{B}相对于坐标系{A}的方位。
任意一点在两坐标系中的变换关系如下:

(3)复合坐标变换

一般情况下,机械臂的变换均是相对于运动坐标系而言的。最终要的就是计算手臂末端相对于大地坐标系的位置。计算的是运动的手臂关节坐标系相对于首端固定坐标系的变换矩阵。即位置描述和方位描述。
(1)位置描述

图1 平移变换
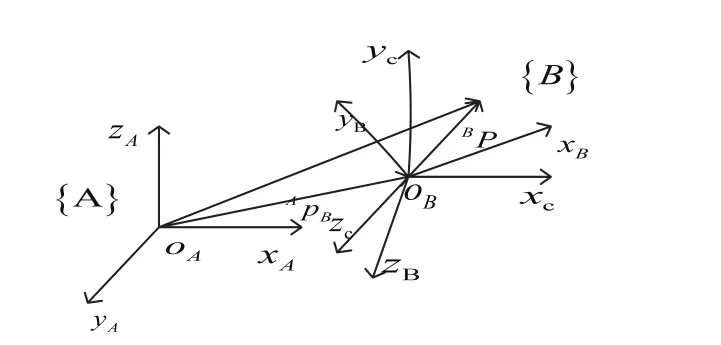
图2 复合变换
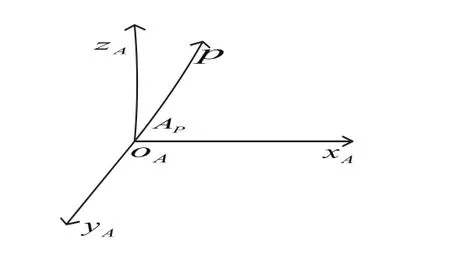
图3 位置表示
在坐标系下,用3×1的列矢量来表示一点P的位置:

(2)方位描述

xB、yB、zB为空间中某物体B在其所在坐标系下的单位矢量。单位矢量相对于参考坐标系的方向余弦组成矩阵,即:旋转矩阵;A-参考坐标系{A};B-坐标系{B}。有九个元素,其中的三个元素独立。单位矢量A、xB中的三个列矢量,它们两两相互垂直,中的九个元素满足以下几个约束条件:

机械手臂模型建立
利用OpenGL建立三维立体模型。求解运动学逆解:已知末端和首段坐标参数,计算各关节参数值。求解运动学正解:已知首段坐标参数和各关节参数值,计算末端位置参数。
机械手臂按照计算出的运动学正、逆解的坐标位置,规划运动轨迹,是机器人按照最短运动路径,运动到指定的最终坐标点。
可视化界面研究
DH参数法下的坐标系
约定X(i)与Z(i-1)垂直相交,变换矩阵为:
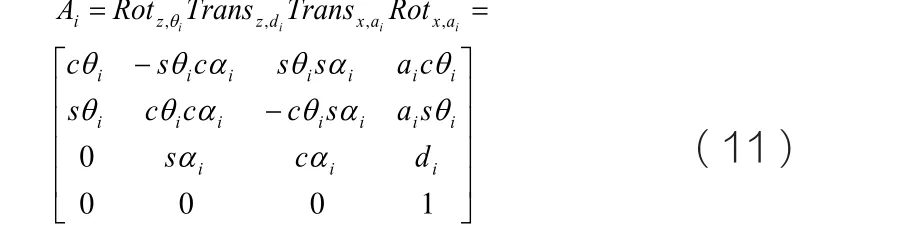
用户根据需求,在界面中点定关节坐标系,拉伸模拟关节的矩形框,确定手臂的长短,叠加出三自由度的机械臂模型。给出工件所在的位置A,运用运动学逆求解方法,计算出此时各关节变量,根据求得的解,进行相应的运动,直到手臂前端坐标与位置A处坐标相重合。当机械臂1回到初始位置,用同样的方法,机械臂2开始运动到B点处提取工件。
结语
利用DH 参数法求解机器人运动学正、逆解,演示其求解界面,并演示出多条手臂动态运动过程是本文研究的重点。在VB环境下动态的演示了机械臂运动过程,本界面实现了在流水线生产前提下可视化模拟的目的。
10.3969/j.issn.1001-8972.2015.24.023
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
今日农业(2020年14期)2020-12-14 19:47:34
河北省科学院学报(2020年1期)2020-05-25 06:57:18
制造技术与机床(2018年11期)2018-11-23 01:07:50
金色少年(奇趣科普)(2016年8期)2016-09-21 02:07:58
我爱学(创意美术与手工)(2016年4期)2016-07-14 06:34:54
现代防御技术(2016年1期)2016-06-01 12:13:28
新高考·高一物理(2016年1期)2016-03-05 22:47:39
海军航空大学学报(2015年1期)2015-11-11 17:18:37
少儿科学周刊·少年版(2015年4期)2015-07-07 22:02:23