
高海拔无人机线路巡检应用研究
2015-11-05 02:30苗俊李鹏祥李峰王璋吕政扬许毅
中国科技纵横 2015年2期
苗俊李鹏祥李峰王璋吕政扬许毅
(1.曲靖供电局,云南曲靖 655000;2.厦门加能电力科技有限公司,福建厦门 361012)
高海拔无人机线路巡检应用研究
苗俊1李鹏祥1李峰1王璋1吕政扬2许毅2
(1.曲靖供电局,云南曲靖 655000;2.厦门加能电力科技有限公司,福建厦门 361012)
随着国家西进战略不断纵深推进,海拔较高对于线路巡检人员而言通常存在着低温、缺氧及辐射高等可能危害健康不利因素,因此使用无人机进行巡检极为必要,然而,无人机高海拔运行也面临着不小困境,如无人直升机使用是燃油发动机,但在高海拔地区空气稀薄会导致燃油燃烧不充分,会有动力损耗,另外,空气稀薄还会影响升力,直升机在高海拔地区要通过更高转速才能获得和低海拔一样升力。因此,油机不适合在云南等较高海拔地区使用,应发展使用电动机来进行高海拔电网无人机巡检作业。
高海拔架空线路 无人机 无人机巡检
随着电网的日益扩大,巡线工作量日益加大,高海拔地区的巡检任务则更加艰难,曲靖输电线路区域绝大部分架空输电线路都远离城镇和交通干线,分布在崇山峻岭之间,运行条件十分恶劣等特点,传统的线路运行维护管理模式和常规作业方式,多采用肉眼或望远镜人工地面目测的方法进行,巡线方式是人员徒步巡线,巡检人员到达这些地区比较困难,工作效率较低,劳动强度大。因此,急需一种高效的高压线路巡检方式,保障线路的安全稳定运行。而输电线路无人机巡线系统沿杆塔飞行,对线路通道、杆塔本体及电气部分进行航拍及局部拍照,从而发现通道隐患及线路缺陷,达到人员巡视的目的,减轻了人员巡视的劳动强度,提高了工作效率,为高压输电线路巡检带来了极大的便利,无人直升机高海拔区域成功应用则是迈向全面发展的关键一步。
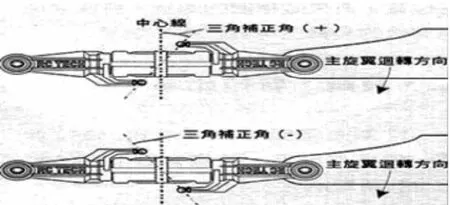
图1 旋翼系统
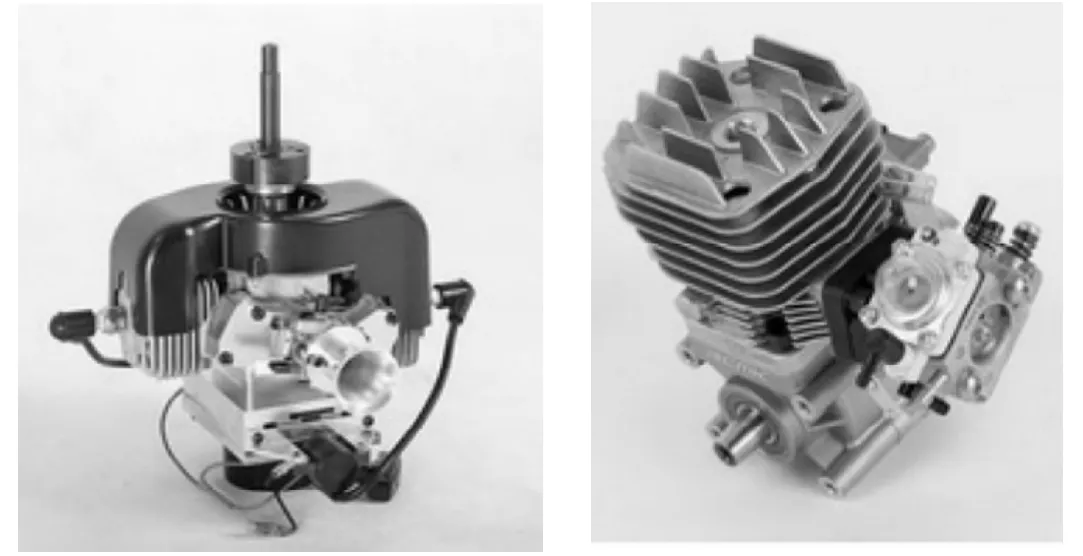
图2 动力系统

图3 巡检系统
1 系统设计研究
架空输电线路巡检分正常巡检、故障巡检、特殊巡检三种,检查包含杆塔、导线、绝缘子、金具、防雷设施、线路走廊等。因此在无人机巡检系统设计可分为三大子系统:无人机系统、巡检系统、通信系统。
1.1 关于无人机系统
无人机系统主要包含:旋翼系统、动力系统。
1.1.1 无人机旋翼系统
旋翼系统中如(图1)所示,升力大小主要是由桨叶提供的,桨叶的设计有气动力方面的要求,同时还要求有动力学和疲劳方面的技术。旋翼桨叶是建立在所选用的材料、制作的工艺技术和旋翼的理论基础之上。根据旋翼桨叶的发展,可分为复合材料桨叶、金属桨叶、混合式桨叶三种形式。

图4 控制系统

图5 地面系统
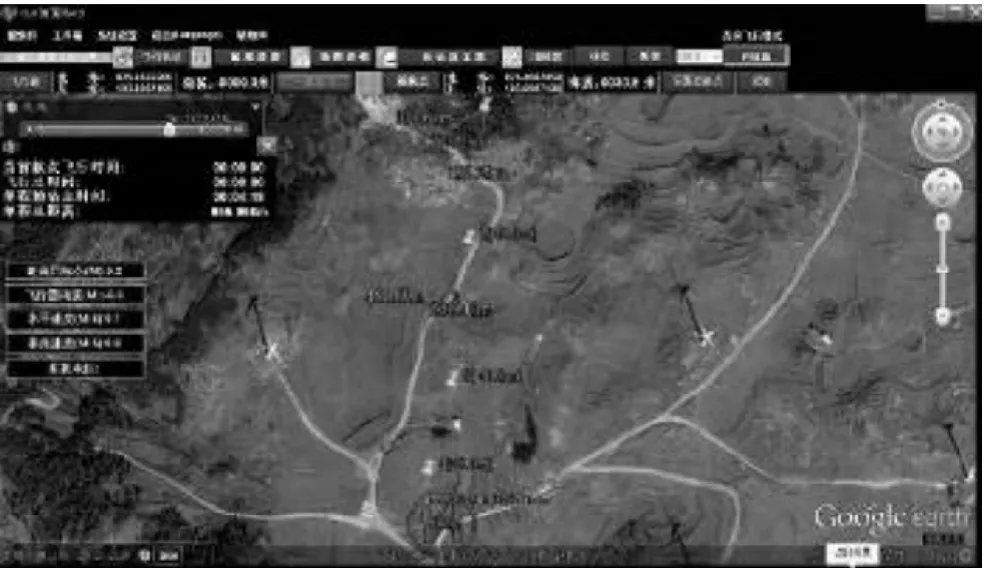
图6 软件界面

图7 无人直升机油动机

图8 无人直升机电动机
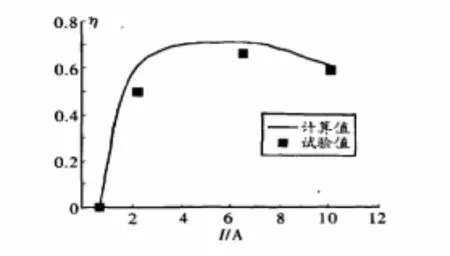
图9 (效率-电流曲线)
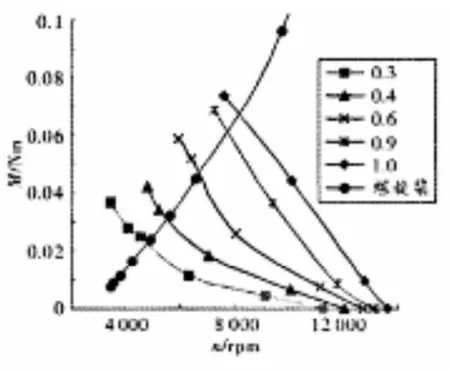
图10 (不同占空比下电机机械特性)
1.1.2 无人机动力系统
无人机的动力系统如(图2)所示,主要是由电动或油动来提供能量,直升机的前进动力和升力都来自直升机的主旋翼,当你进行细部观察时就会发现前进的直升机转到前面和后面的桨叶的桨距是不一样的,就是叶片倾斜的角度是不一样的,他们通过自动倾斜器控制。自动倾斜器的倾斜会导致桨叶的桨距发生周期变化,使得旋翼空气动力不对称,桨叶的旋转平面将向所需方向倾斜,旋翼的拉力矢量方向因此发生改变,这样就达到操纵直升机横向和纵向飞行的目的。直升机的俯仰,滚转,当然还有前进后退都是由桨叶的周期变距操作实现的。
1.2 关于巡检系统
巡检系统如(图3)所示,利用无人直升机作为载体,装载可见光照相机、可见光摄像机、红外热像仪及通信设备等对架空输电线路进行巡检,不仅能代替巡线工人和有人直升机巡线系统,还可以弥补人工巡线的不足,全方位检查输变电线路的情况,并及时发现线路故障和隐患,将现场情况传回地面控制中心。
1.3 关于通讯系统
无人机通讯系统包含:控制系统、地面系统、软件系统。
1.3.1 无人机控制系统
无人机控制系统如(图4)所示,控制系统包含机载和地面部分,维持飞机的稳定飞行由机载部分负责并传输图像信号到地面部分,地面部分根据无人机的状态以及得到的图像信号作出下一步的任务信号,并发送给机载部分,为了确保安全飞行,防止飞行机构失控,增加了由飞控手掌握的控制器。机载部分与地面部分之间有两条数据连接,负责传送图像和传送指令和飞行状态。地面部分可以分为图像处理平台和地面站部分,地面站与机载飞行控制器连接,发送控制命令,获得飞机状态信息,图像处理平台获取摄像头的图像信号并处理图像。
1.3.2 无人机地面系统
实时显示直升机采集的图像信息,并对其进行远程遥控;图像信息实时录制,随时回放观看;可以将外部信号接入地面站进行显示或将地面站信号在外接屏幕上显示如(图5)所示;
1.3.3 无人机软件系统
无人机软件系统实现了无人直升机地面站系统的导航、空间数据处理和三维可视化的功能,基于Java语言编写整个地面站软件系统,嵌入3D GIS,利用Java软件开发来实现3D GIS导航的过程。如(图6)所示。
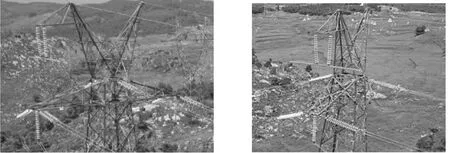
图11 无人直升机近视角监测杆塔绝缘子、塔材等
2 关键技术问题研究
无人直升机根据动力可分为:油动无人直升机、电动无人直升机,在低海拔地区两者都可以较好地完成任务,但在高海拔区域下二者区别如下:
2.1 关于油动无人直升机研究如(图7)所示
发动机在高原上工作的适应性研究:
2.1.1 气压低、缺氧对发动机性能的影响
随着海拔高度的增加,空气逐渐稀薄,气压降低,据实测资料表明,气压与海拔高度有下列关系: PG=PO-CH式中PG某海拔高度的大气压力(毫米汞柱),PO海平面处的大气压力,PO=760毫米汞柱,H海拔高度(米)大气中的平均含氧量也是随着海拔高度的增加而减少的。
在发动机转速不变的情况下,非增压发动机的功率Ne是与空气的比重γ、指示效率η和机械效率mη成正比。因此,发动机在平原与高原上的功率可用下式表达:
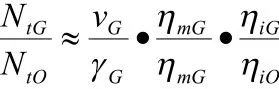
对发动机功率影响最大的空气比重γ,即大气压力及进入气缸中的空气压力。由于高原地区空气稀薄,年平均含氧量低,发动机在海拔高度每升高1000米时,其功率就降低百分之10左右,最大扭矩下降的幅度则还要大些,且向高转速方向移动。总之,发动机的动力性能下降,性能也随之变坏。
2.1.2 气温对发动机性能的影响
随着海拔高度的增加,气温越来越低。气温低会使启动困难。此外,过低的温度会使金属及非金属材料发生冷脆,并容易断裂,降低发动机的使用寿命。
2.2 关于无人直升机电动机研究如(图8)所示
关于电动机在高原适应性的研究:
鉴于云南地处高海拔地区,具有典型的高原气候特征,采用聚合物锂离子电池作为飞机的动力电池作为试研,聚合物锂离子电池具有以下特点:塑形灵活性;更高的质能比(3倍于MH-Ni电池);完美的安全可靠性;更长循环寿命,容量损失少;体积利用率高;广泛的应用领域。
无人机所用动力电机为无刷永磁直流电机,无刷电机取消了由电刷和换向器组成的机械接触机构,没有机械摩擦和换向火花,具有效率高、寿命长、运行可靠、无电磁干拢等优势。无刷电机在额定转速时,扭矩及电流计算公式如下:

式中:I为工作电流,M为扭矩,U为工作电压,UΔ 为调速器的导通压降,n为转速,kv为电机参数,r为内阻,0I为电机的空载电流。由以上公式可得,电机的输入功率、输出功率及效率如(图10):

根据以上方法算得效率与实验对比如(图9)所示,在电机最大工作电流附近相对误差为3%-7%,小电流时为22%。
如(图10)所示电机的机械特性,转速和扭矩随调速器控制输出功率减小而减小。图中还包含了机桨在固定转速时的扭矩-转速曲线,当电机曲线和机桨的扭矩大于电机最大扭矩时,电机就不能够驱动螺旋桨启动,这时应该提高输出的功率,升高电机的工作电压。
3 关于实地飞行的研究
为证实之前所述,我们选择海拔2500m高山地区,选取一段220KV架空输电线路,无人机系统设置距离线路约50m,速度4m/s沿线巡检,并在每级杆塔悬停观测,由于受到高海拔的影响,空气稀薄(海拔2500米高度时,空气含氧量约为低海拔地区的6成左右),此时,发动机同样的吸气动作,实际吸入的氧气减少,可供燃烧的氧气少了,汽油发动机的动力输出就会大幅降低,导致无人直升机的油动发动中的汽油燃烧不完全,加大油门,飞机不会往高处飞,达不到要求的2500米的海拔高度。后将无人机的油动发动机改成电动发动机,用电池代替汽油作为飞机的动力,起降试验测试完成,巡检图像清晰已经能够满足对线路巡检的要求如(图11)所示。
经过以上多次试验,证实电动无人机更适合于高海拔环境下的巡检作业。
4 结语
随着无人直升机技术的愈趋成熟,其操作系统会变得更加简单,使用性能的优越性将会得到充分的体现,在电力线路巡检方面将得到更加广泛的应用。
无人直升机能够以自动或遥控的方式,通过预制定的飞行路线,在卫星定位系统的控制和引导下对高压输电线路进行巡视,将拍摄和检测的数据实时传输或储存在硬盘里。从而代替人工对输电线路特别是地理环境恶劣及重要线路进行巡检,及时发现杆塔、通道走廊以及运行设备的故障隐患、设备缺陷等异常现象,减轻工作人员的劳动强度,降低了巡线的成本,大大提高巡检的安全保证和自动化水平,达到减负增效的目的。
[1]张云飞.发动机高原性能研究现状与展望.《内燃机与配件》杂志,2012[07]: 12-13.
[2]崔心存.提高高原用发动机的性能.《Automobile Technology》杂志,1981[02]:10-15.
[3]景岩.无人机发展综述[J].《才智》杂志 ,2013[16]:19-21.
[4]飞行器设计专业发展[A]. 航空科学技术学科发展报告(2006-2007)[C] 2007年:8-9.
[5]陈韬.直升机在输电线路运检工作中的技术研究[D] 华北电力大学(北京),2010年:11-12.
As the west strategy has been carried forward, higher for line inspection personnel usually exist in low temperature and hypoxia and the high radiation may endanger health disadvantage, so using unmanned aerial vehicle (uav) for checking is necessary, however, unmanned aerial vehicle (uav) high altitude operation are also facing a big trouble, such as unmanned helicopter is using fuel engine, but at high altitudes thin air will lead to combustion of fuel oil is not sufficient, there will be a power loss, in addition, the thin air can also affect the lift, the helicopter at high altitudes to lift to achieve higher speed and low altitude. As a result, the oil machine is not suitable for use in yunnan higher altitudes, should use motor for high altitude grid drone checking homework.
the high elevation overhead line Unmanned aerial vehicle (uav) Unmanned aerial vehicle (uav) inspection
苗俊(1971—),男,本科,研究方向为输电线路运行、检查、管理等;李鹏祥(1970—),男,中专,研究方向为输电线路运行、检查等;
李峰(1987—),男,本科,研究方向为输电线路运行、检查等;王璋(1985—),男,本科,研究方向为输电线路运行、检查等;吕政扬(1967—),男,本科,研究方向为电力系统输电设备应用研究等;许毅(1987—),男,本科,研究方向为智能机械自动化设计及应用等。
猜你喜欢
火控雷达技术(2023年2期)2023-07-15
北京航空航天大学学报(2021年9期)2021-11-02
中国电业与能源(2021年4期)2021-05-22
军民两用技术与产品(2021年9期)2021-03-09
广西电业(2020年11期)2020-03-23
电子制作(2019年9期)2019-05-30
固体火箭技术(2018年6期)2019-01-18
无人机(2018年1期)2018-07-05
北京航空航天大学学报(2016年8期)2016-11-16
电测与仪表(2015年3期)2015-04-09
