
基于Calib工具箱的图像测量方法
2015-11-03 01:41:55山西中北大学机械与动力工程学院杨乐孟江
河北农机 2015年10期
山西中北大学机械与动力工程学院 杨乐 孟江
基于Calib工具箱的图像测量方法
山西中北大学机械与动力工程学院杨乐孟江
随着我国在工程建设领域的发展越来越深入,在隧道工程建设中引入摄影测量来进行工程安全的监测,是一种极具发展潜力的技术。通过滤波对不同区域的图像进行处理,并采用Matlab软件对图像进行边缘和角点的提取。应用Calib工具箱得到相机的内部参数和外部参数,这为隧道变形的监测工作提供了新的思路和方法。
Calib工具箱;图像测量;隧道监测
1 引言
在我国近些年来的发展中,尤其对经济建设给予了足够的重视,从而加大了在基础建设环节中的投资力度,使得我国在工程建设领域的发展越来越深入。在逐渐增加的隧道施工建设中,施工的技术就成为了不可忽视的环节,尽管这一系列的施工技术有着屡次的提高,但在实际的隧道施工中总会有不可预计的事故发生[1]。新奥法在20世纪60年代初期被正式提出,伴随我国的逐步引入,隧道施工方面监控量测的应用就显得尤为重要[2]。
基于上述背景,本文先是通过滤波对不同区域的图像进行处理,处理之后采用Matlab软件对图像进行边缘和角点的提取。接着选用Calib工具箱的图像测量方法,对选取的样本进行大量训练得到计算结果,确定出相机的内部参数,这为隧道变形的监测工作提供了新的思路。
2 Calib标定工具箱
相机标定工具箱 CameraCalibration Toolbox(简称Calib工具箱)是由加州理工学院视觉研究小组开发的MATLAB环境下的标定工具箱,它可以在多个系统下使用,并且无需任意一种特定的Matlab工具箱[3]。
2.1Matlab平台简介
Matlab作为美国的MathWorks公司于1984年向市场推出的一个数学型的软件,它可以在数值的分析计算、算法的开发、使数据更为可视化等方面进行处理和应用。在实验时的后期图像处理识别中,就是选择在Matlab这个软件平台上进行编制代码和程序来实现的。Matlab是一种具有科学性的计算平台,在处理实际问题上也是一种直观、简洁以及较为高效的计算机形式的语言[4-5]。
2.2Calib工具箱原理
XXC=RC*XX+TC(1)式中,RC和TC分别代表了旋转矩阵和平移向量。
进一步可简写为:

令r2=x2+y2,则因径向畸变和切向畸变所影响的坐标Xd为:

式中,等号右边第一项是径向畸变,dx是切向畸变向量,且有:

最后考虑到相机的内部参数矩阵,

以上是所采用Calib标定工具箱的理论基础与各参数含义。
3 相机标定实验与分析
3.1Calib工具箱环境
将Matlab标定工具箱的文件直接添加到对应的目录,并在不同角度拍摄10组图片,将这10组需要标定的棋盘图也放到相应目录下,接着在Matlab中输入命令calib_gui,在窗口中选择Standard,得到相机标定工具箱主控制界面。

图1 工具箱主控制界面
对相机进行标定,首先选择Image names,在命令行窗口输入图片basename及格式,即可读入所摄10组图片。
3.2内部参数的标定
返回到主控制界面,点击Extractgrid corners,依次提取每幅图的角点。其中搜索窗口设置略大,但不要超出一个方格的大小,这是为了能将偏离角点也准确捕捉到,从而提高数据的准确性。在角点提取结束后,选择Calibration进行相机的标定,经过多次迭代之后,即可得到相机的内外参数。相机较为重要的一些内部参数,见表1。
获取到内部参数后,可以通过界面上的ShowExtrinsic来进行查看10幅标定图像的外部方位显示图,见图2。
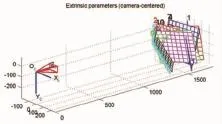
图2 10幅标定图像的外部方位
4 结论
在确定相机的内部参数后,根据对应像素坐标,进行外部参数的标定。通过采用Compute_extrinsic_refine函数经多次迭代计算得到左右两幅图像外部参数。这里采用Calib工具箱对其进行离线标定,根据成像原理并考虑照相过程可能发生的径向畸变和切向畸变等因素,得到相机内部参数和左右两幅图像的外部参数值,进而为后续的三维重构提供了重要及精确的参数。

表1 内部参数
[1]雍琦.近景摄影测量基本技术及其应用[J].才智,2013,(19):190-191.
[2]陈振华,赵鸣,乔东梁.一种基于近景摄影测量理论的地铁隧道变形监测方法研究[J].特种结构,2014,(5):61-65.
[3]马晓路,刘倩.MATLAB图像处理从入门到精通[M].北京:中国铁道出版社,2013,254-263.
[4]史峰,王小川.MATLAB神经网络30个案例分析[M]北京:北京航空航天大学出版社,2010,65-72.
[5]胡晓军,徐飞.MATLAB应用图像处理 [M].西安:西安电子科技大学出版社,2011,213-219.
杨乐,1989年7月出生,山西省大同市人,硕士研究生,研究方向:模式识别与智能控制。
猜你喜欢
Chinese Physics B(2022年10期)2022-10-26 09:46:04
电子测试(2021年9期)2021-06-17 10:59:46
电子制作(2021年9期)2021-06-17 03:59:54
美与时代·美术学刊(2019年9期)2019-11-29 13:17:39
中华建设(2019年6期)2019-07-19 10:14:20
山东工业技术(2017年18期)2017-09-12 15:33:07
汽车维护与修理(2017年17期)2017-02-07 07:25:41
水利科技与经济(2016年7期)2016-04-25 13:03:12
数学小灵通·3-4年级(2016年4期)2016-04-10 23:48:29
计算机与网络(2014年1期)2014-03-25 10:56:56
