
基于知识重用的钳臂快速设计方法
2015-10-29 02:27杨志兵李曼丽
中国机械工程 2015年2期
杨志兵 李曼丽
北京理工大学,北京,100081
基于知识重用的钳臂快速设计方法
杨志兵李曼丽
北京理工大学,北京,100081
为充分利用已有设计知识实现钳臂的快速设计,提出了一种将知识重用与参数化设计相结合的方法。分析了钳臂的结构和设计知识特点,并对知识进行了分类、表示。利用知识工程和参数化设计将事实性、过程性知识应用到标准模型中,用实例表示网格划分信息知识。在知识重用方面,采用基于实例的推理技术,并结合钳臂实例的属性相似度及历史设计的指导因子,检索与当前设计要求最匹配的实例。最后,通过实例验证了该方法的可行性与有效性。
知识重用;参数化设计;快速设计;基于实例的推理
0 引言
电焊钳用于汽车白车身焊接,是典型的多品种小批量生产设备。钳臂零件作为自制件,相似度较高,因此设计的重复性工作量约占总设计工作量的50%。实际操作中,设计人员通常根据设计要求,凭借个人的设计经验在已有产品模型库中选择一套基本满足用户需求的模型作为设计依据去完成设计工作。查找的过程是一个凭借印象的无目的检索过程,最后找到的模型不一定是真正匹配的模型,在一定程度上浪费了时间。另外,对检索到的实例进行修改,也只是基于草图和特征的修改,不仅繁琐而且容易出错,原有的设计知识并不能得到真正的重用。
近年来,知识重用得到越来越多的关注。为了能够确保产品开发中进行有效的知识获取、共享和重用,Baxter等[1]提出了将设计要求管理、设计原理和基于知识的设计方法集成的知识重用框架。知识的表示在很多研究中已经体现,但是大多数研究倾向于结构化的设计知识[2]。这类表示方法对于非结构化和模糊的设计知识无法适用,而利用实例可以表达出这些知识。基于实例的推理(case-based reasoning,CBR)的关键思想是利用解决以前问题的适应性方案处理新问题,目前,CBR的原理和技术都已经很成熟。Janthong等[3]利用基于公理化设计和CBR技术来实现知识重用以满足新的设计要求和约束。Vong等[4]根据相似度大小查找匹配实例,然后基于CBR技术对实例进行适应性修改,生成新的液压生产机设计方案。宋欣等[5]通过最近邻算法匹配最相似的实例,并引入相似系统理论中的敏感性分析来配置属性的权重。以上研究在相似度计算时,仅分析了新实例与已有实例的共有属性,并未考虑前人设计新实例时对已有实例所进行的选择,而这一点对于实例是否匹配也很重要。
针对目前钳臂的设计现状,本文在设计知识研究的基础上,提出利用知识重用和参数化设计相结合的方法来实现钳臂的快速设计,并开发用户界面,提高设计可视性。
1 钳臂设计的知识重用概念
要实现钳臂设计知识的重用,首先必须了解钳臂的结构和设计特点。钳臂主要包括钳臂组件和握杆组件。由于重复性工作较多,且对设计人员的专业设计知识要求较高,因此重用已有设计知识具有重要意义。
钳臂设计过程中的知识是指共享的公式化规则和设计者的经验,其内涵是有关设计信息和设计经验的总和[6]。在实际设计中,知识大多体现为设计人员的设计经验,简单知识可利用表达式进行描述,但是复杂知识连设计人员自己也无法清楚地描述。将获取到的设计知识分为几何关系(设计参数等)、算法规则和关系(装配关系等)、常见技术设计规则(国家标准、行业标准等)、企业知识设计规则(经验规则等)[7]。为了有效地表示和重用钳臂设计的知识,本文采用如图1所示的框架实现基于知识重用的钳臂快速设计。
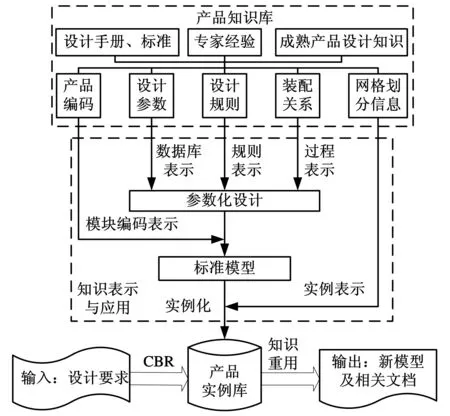
图1 钳臂设计知识重用的框架
(1)钳臂设计知识的获取。钳臂设计知识的来源主要包括设计手册和标准,是国家、行业或企业等的设计标准;专家经验,指一些有经验的设计人员所积累的设计经验;成熟的产品设计知识,指在设计过程中被设计人员所共享的成熟的设计知识。本研究中将钳臂设计知识主要分为产品编码、设计参数、设计规则、装配关系、网格划分信息。
(2)钳臂设计知识的表示与应用。钳臂的设计知识分类之后,需要通过法则对这些知识进行符号化的描述,使其能够进行共享和继承。产生式规则表示法是常用的知识表示方法,此外还有编码表示法、过程表示法、实例表示法等方法。设计参数、产品编码为事实性知识;设计规则、装配关系为过程性知识,可以通过产生式规则或过程等完整地表示出来,并应用到标准模型中;网格划分信息作为钳臂设计中的实例性知识,难以用符号表示,可以通过实例去表示。
(3)基于实例的推理和知识重用。基于实例的推理通过实例对设计知识的再利用,来实现产品的快速设计。新产品设计时,设计人员往往会参照与当前设计要求较匹配的实例,在该实例基础上进行修改设计,修改过程实际上就是一个知识重用的过程。
2 钳臂设计知识的表示与应用
获取产品设计阶段的重要知识并应用于设计的验证和测试,有助于根据过去和当前的趋势去预见未来的发展[8]。将产品设计过程中形成的规则、经验等知识重复应用到设计活动中,需要对这些知识进行统一的组织、管理,并用适当的方法进行表示。
2.1钳臂编码知识及表示
钳臂产品种类较多,为便于管理和查询,应根据钳臂的结构特点和功能特性对钳臂进行分类,并赋予各类模型具有一定规律性、便于设计人员和系统识别处理的编码,通过这些编码可以了解钳臂的设计信息。钳臂的编码知识利用编码表示法进行表达,编码规则如下:①第1位码表示钳臂类型,钳臂分为C型和L型,分别用C和L表示;②第2位码表示钳臂弯折方式,每类钳臂都有4种弯折方式,分别用1、2、3、4表示;③第3位码表示钳臂连接方式,分为卡块连接和螺纹连接,分别用1和2表示;④第4位码表示电极握杆组件,电极握杆作为企业标准件有不同的种类,用阿拉伯数字表示。
2.2钳臂设计参数、设计规则、装配关系知识与表示
钳臂的设计参数描述了钳臂的基本结构;设计规则代表产品设计时参数与参数或零件之间的配置,如当钳臂宽度和直径一定时,钳臂的弯折角度应该在一定范围内或遵从某个关系表达式;装配关系描述了零部件之间的约束关系。参数化设计和CATIA V5知识顾问模块可以将隐式的设计经验转化为嵌入设计过程的显式知识。下面将通过某一类型钳臂的参数化设计过程阐述这三种知识的表示方法和应用。
2.2.1建立钳臂模型
在CATIA平台下利用三维设计技术建立钳臂的三维模型,根据钳臂的结构信息特别是倒角或凹槽类似特征确定特征建立的顺序,以免某些变量的修改量比较大时,一些特征出现严重变形,甚至导致模型无法更新。
2.2.2定义设计参数
各级参数之间存在的关联关系本质上就是产品的设计参数知识,建立这些关系是参数化设计的关键。根据产品结构特点,设置以下参数作为主参数:钳臂直径D、握杆直径d、加强筋属性rib、总长度L1、轴长L2、轴径D2、总宽度W、钳臂第一段宽度W1、钳臂第二段宽度W2、握杆高度H、倾斜角度A、钳臂第一弯折角度A1、钳臂第二弯折角度A2。
钳臂设计过程中,主参数设置为全局参数,依据设计经验、设计标准等确定产品的从参数及关联规则,并利用CATIA V5的知识工程顾问模块中的公式(Fomula)建立关联关系。如握杆的弯折角度由钳臂弯折角度和倾斜角共同决定:
PartBodyRib.1Sketch.3Angle.1Angle =
180deg-`External ParametersA2 arm_angle_2`+`A holder_angle`
实现设计知识的重用需要继承以往的设计经验,因此产品的设计参数应该保留下来,便于为后续设计提供借鉴。为了方便钳臂设计参数的记录和调用,采用数据库的形式来表示这些设计参数。
2.2.3定义设计规则
只有了解了设计规则,才能快速进行产品的变型设计。因此,将设计规则表示并存储在标准模型中,即使设计人员没有成熟的设计经验,也可顺利完成设计。设计规则往往采用产生式规则表示法描述。
给定钳臂直径D和握杆直径d的数值,则钳臂和握杆连接处的其他尺寸均固定,配合的卡块、螺栓、垫片等规格也可确定。通过CATIA V5知识工程顾问模块中的Rules功能建立规则,命名为Type,代表6种尺寸配合方式,分别用T1,T2,…,T6表示。部分代码如下:
if Type =="T1"
{`21.567.40670D1 arm_diameter`=45 mm %钳臂直径D
`21.567.40670D3 holder_diameter` =24 mm%握杆直径d
`21.567.40670D5 hole_diameter_1` =6.6 mm%钳臂孔径d2
`B6.012.052RelationsDesignTable.1Configuration`=1%卡块型号
……
}
另外,一些设计人员必须要遵守的设计规则也可通过Checks功能编写代码进行描述。如定义轴径必须要小于钳臂直径,代码为`22.577.40670D1 arm_diameter`> ShaftD,如果设计时违反了该标准,则会出现警示图标,直到设计人员修改符合检验条件为止。
2.2.4定义钳臂装配关系
装配关系主要有两类:一类是标准件与装配件之间的几何约束关系;另一类是在装配设计中所需要的装配特征,如面、轴等几何元素(通常在装配件和标准件的建模过程中都会进行标识)。钳臂设计过程中,若完全由设计人员确定装配关系并手动完成装配过程,则很容易发生遗漏或错误。本文将装配关系知识利用过程封装起来,在参数化设计中直接调用相应子程序即可。
利用Publication功能发布与钳臂组件和握杆组件装配有关的轴、面等特征。将装配关系用过程表示法表示,设计时调用该过程可方便地进行握杆组件的替换,同时不改变装配的约束关系。
2.2.5完成参数化建模
通过以上过程能够实现钳臂模型在CATIA V5平台下的参数化设计,从而生成标准CAD模型,并保存在标准模型库中。
2.3钳臂网格划分信息表示
建立钳臂的CAD模型之后,在一定程度上完成了钳臂设计。分析钳臂的强度和刚度是否满足实际应用要求,需要对钳臂进行有限元分析。钳臂有限元分析前处理关键的一步是网格划分,只有高质量的网格划分才能得出有意义的分析结果。以往设计中,钳臂的有限元分析是利用CATIA V5自动划分的网格进行计算的,结果很不精确。在其他一些研究中,网格划分会涉及一些复杂的算法,但由于相当多的参数和特征都会在一定程度上影响网格,即使再精确的算法也缺少实际支撑。故本研究用具体的实例表示网格划分的知识。
基于一种钳臂的标准模型,固定其他参数值,使其中一个参数在给定范围内变动,如果该参数的变化使得钳臂有限元模型的网格划分差异比较明显,则该参数对网格划分影响较大。通过分析,影响钳臂网格划分效果的主要参数是钳臂直径D。因此,基于不同的D将钳臂进行实例化,然后将对应的网格划分良好的模型存入实例库中,使得网格划分信息这类实例性知识通过实例表示。
2.4其他知识的表示
成熟的经验也是产品设计的依据和参考,因此,把以往的经验数据以参数的形式存储在参数库中。例如,当考虑钳臂是否需要加强筋时,调出已有钳臂实例有限元分析的结果,查看没有加强筋时是否满足强度要求,从而为新设计提供指导,并节省分析时间。
3 基于实例的推理
经过实践检验、符合设计和工程要求的模型,可作为实例进行保存,并作为重要的设计参考依据。数量较多的实例使得通过实例检索来实现设计知识重用成为一种趋势,因此寻找一种行之有效的实例检索方法也变得越来越重要[9]。
3.1实例检索
实例检索是利用特征索引和相似度知识从产品实例库中查找与设计要求最匹配的实例[10]。在分析钳臂设计的基础上,为便于实例检索,采用三维实例模型与模型特征数据相结合的方法来描述实例。首先,通过钳臂编码查找到三维实例模型,然后根据特征数据找到对应的实例。本研究中,直径对网格划分影响较大,实例库中包括直径分别为45 mm、50 mm、55 mm、60 mm的实例。
采用加权最近邻算法进行实例检索,其中包括以下两个检索因子。
3.1.1实例的相似度S
相似度计算是最近邻算法的关键[11]。设a、b为两个属性,它们之间的相似度用sim(a,b)表示,其中,sim(a,b)∈[0,1]。对于有确定值的属性,其相似度的表达式为
sim(a,b)=1-|a-b|/l
(1)
式中,l为检索条件上下界限区间。
若直径上下界限区间为5mm,则d=53mm的新实例与直径D=55mm和D=50mm的实例相似度分别为
sim(53,55)=1-|53-55|/5=0.6
sim(53,55)=1-|53-50|/5=0.4
因此,直径D=55mm的实例与设计要求比较匹配。
在计算新实例和已有实例相似度的时候,将新实例表示为
P0=(a01,a02,…,a0n)
(2)
式中,下标0表示新实例;a0j为新实例P0的属性,j=1,2,…,n;n为所包含属性的个数。
已有的第i个实例可表示为
Pi=(ai1,ai2,…,ai n)
(3)
式中,m为已有实例的数量;ai j为第i个已有实例的属性,i=1,2,…,m。
则新实例与已有实例的属性相似度构成相似度矩阵
(4)
对于第j个属性,若新实例与已有实例的相似度差异很小,则应赋予该属性较小的权重;反之,则赋予相对较大的权重。n个属性的权重为
T=(t1,t2,…,tn)
因此,新实例和实例库中第i个已有实例的加权平均相似度为
(5)
由于钳臂网格划分与直径D的关系较大,本研究仅考虑直径D单个因素,式(5)可简化为
Si=sim(D′,Di)=1-|D′-Di|/5
(6)
式中,D′为新实例的设计要求的直径;Di为原有实例库中的直径。
3.1.2历史指导因子G
当设计人员检索出多个模型时,最终会选择最接近设计要求的一个模型,历史的选择对后续设计具有一定的指导意义,本研究根据查询条件对设计人员选择最终模型的结果进行统计。设定当查询条件D′
因此,原有实例库中的第i个已有实例的历史指导因子Gi表达式为
(7)
实例相似度S和历史指导因子G的权重分别为A和1-A,本研究取A=0.7,通过式(6)、式(7)得出新实例P0与已有实例的总相似度:
(8)
当有多个已有实例均符合设计要求时,可设定一个阈值,取总相似度大于该阈值的实例或选取总相似度值较大的实例。
3.2知识重用
选择与新设计要求较匹配的实例之后,需要对实例进行修改。实例包含了大部分的事实性知识、规则性知识和实例性知识,修改实例也就是重用了这些知识。本研究中,实例修改主要包括设计参数修改和零部件替换两个方面。
3.2.1设计参数修改
钳臂实例中的设计参数通过用户自定义设置主参数,使设计规则、成熟的设计经验及网格划分信息均与主参数相关联。例如,修改钳臂直径D和握杆直径d后,卡块、内六角螺栓等标准件自动更新规格,对应的有限元模型也自动更新。修改主参数时应以历史设计数据为指导,以避免设计失败。
3.2.2零部件替换
在某些新设计中,有时不需要修改设计参数,只需替换零部件。例如,当钳臂所受的焊接压力比较大时,仅需要更改电极帽;但多数情况下,要替换整个握杆组件。
针对快速设计,本文利用VB6.0开发了图2所示的钳臂参数化设计界面。系统可自动读取当前实例的设计参数,并加载其他匹配实例的设计参数和历史设计数据;另外,设计人员可直接在界面中进行参数修改和零部件替换,增加了实例修改的可视性,避免建模出错。

图2 钳臂参数化设计界面
4 实例验证
本文首先通过对CATIAV5进行二次开发,实现钳臂的参数化设计;然后利用Access数据库技术建立钳臂产品的实例库,方便设计人员调用;最后利用VB6.0开发用户界面,实现实例检索、实例修改以及实例的添加、删除等功能。
(1)根据设计要求确定模型。设计人员根据焊接的板材厚度、材料、尺寸及其他要求,计算出所需的焊接压力,从而确定钳臂的类型,如选择C313型;然后设定模型特征数据,如钳臂直径D设为58mm;最后检索实例库。
(2)新模型设计。如果查找到匹配实例,则选取相似度较高的实例,根据设计要求进行实例修改(主要是参数修改和握杆组件的选择);否则,进行新的设计。
(3)验证新模型。验证新模型是否满足设计要求,如不满足,则重新调整参数或从握杆组件库中查找到其他标准组件进行替换,然后重新验证,直到满足要求为止。
整个钳臂的设计过程中,设计人员只需要在用户界面上进行操作即可,既有效利用了封装的设计知识,又大大节约了模型查询时间和设计修改时间,在一定程度上实现了快速设计。
5 结语
本文提出的钳臂快速设计方法充分重用了经过实践的设计知识,避免了设计人员的重复劳动,使其集中精力到创新设计。实例库的建立使得钳臂模型的统一管理成为可能。知识重用与参数化设计相结合的方法为钳臂设计提供了一种思路,然而实例的检索与匹配可能需要涉及更多的参数。但是,实现钳臂快速设计不能仅限于建模层,最终确定设计是否成功还需进一步的仿真分析。未来可以对钳臂有限元模型的分析进行扩展研究。
[1]BaxterD,GaoJ,CaseK,etal.AnEngineeringDesignKnowledgeReuseMethodologyUsingProcessModelling[J].ResearchinEngineeringDesign,2007,18(1):37-48.
[2]钱玲玲,李建军,王义林,等.标准件库管理系统中的知识重用技术研究[J].中国机械工程,2006,17(S1):315-318.
QianLingling,LiJianjun,WangYilin,etal.ResearchofKnowledgeReuseinStandardPartLibraryManagementSystem[J].ChinaMechanicalEngineering,2006,17(S1):315-318.
[3]JanthongN,BrissaudD,ButdeeS.CombiningAxiomaticDesignandCase-basedReasoninginanInnovativeDesignMethodologyofMechatronicsProducts[J].CIRPJournalofManufacturingScienceandTechnology,2010,2(4):226-239.[4]Vong C M,Leung T P,Wong P K.Case-based Reasoning and Adaptation in Hydraulic Production Machine Design[J].Engineering Applications of Artificial Intelligence,2002,15:567-585.
[5]宋欣,郭伟,王志勇,等.基于实例推理的可倾瓦推力轴承方案设计[J].计算机集成制造系统,2009,15(8):1478-1483.
Song Xin,Guo Wei,Wang Zhiyong,et al.Case-based Reasoning in Scheme Design for Tilting-pad Thrust Bearing[J].Computer Integrated Manufacturing Systems,2009,15(8):1478-1483.
[6]齐元胜,彭华,方兴,等.基于Web的设计知识管理系统研究[J]. 计算机工程与应用,2003,39(4):98-101.
Qi Yuansheng,Peng Hua,Fang Xing,et al.Systematical Study on Design Knowledge Management Based on Web[J]. Computer Engineering and Application,2003,39(4):98-101.
[7]Tang D,Zhu R,Tang J,et al.Product Design Knowledge Management Based on Design Structure Matrix[J].Advanced Engineering Informatics,2010,24(2):159-166.
[8]Chandrasegarans K,Ramani K,Sriram R D,et al.The Evolution,Challenges,and Future of Knowledge Representation in Product Design Systems[J].Computer-Aided Design,2012,45(2):204-228.
[9]Bai J,Gao S,Tang W,et al.Design Reuse Oriented Partial Retrieval of CAD Models[J].Computer-Aided Design,2010,42(12):1069-1084.
[10]魏峰. 基于知识重用的堆垛机快速设计系统研究与开发[D]. 太原:中北大学,2011.
[11]蒋占四,陈立平,罗年猛,等. 最近邻实例检索相似度分析[J].计算机集成制造系统,2007,13(6):1165-1168.
Jiang Zhansi,Chen Liping,Luo Nianmeng,et al. Similarity Analysis in Nearest-neighbor Case Retrieval[J].Computer Integrated Manufacturing Systems,2007,13(6):1165-1168.
(编辑张洋)
A Knowledge-reuse-based Rapid Design Method for Clamp Arms
Yang ZhibingLi Manli
Beijing Institute of Technology,Beijing,100081
To make full use of existing knowledges on clamp arm design,a method combined knowledge reuse and parametric design was put forward to realize the rapid design.The characteristics of clamp arms structure and design knowledge were analyzed,and the knowledge was classified and represented.The factual and procedural knowledges were applied to the standard models utilizing the knowledge engineering and parametric design,and the mesh information was represented through the instances.Through the CBR,the most matching instances were searched out according to the attribute similarity between the new instance and original instances,as well as the guidance factor of history design. Finally, a case study was demonstrated to show the feasibility and validity of the proposed method.
knowledge reuse;parametric design;rapid design;case-based reasoning(CSR)
2013-09-22
TP182;TP391.7< class="emphasis_italic">DOI
:10.3969/j.issn.1004-132X.2015.02.017
杨志兵,男,1959年生。北京理工大学机械与车辆学院副教授。主要研究方向为工业工程和机械制造。发表论文10余篇。李曼丽,女,1990年生。北京理工大学机械与车辆学院硕士研究生。
猜你喜欢
小学生学习指导(高年级)(2021年10期)2021-11-02
科学与财富(2019年27期)2019-10-25
电子制作(2019年14期)2019-08-20
云南档案(2019年7期)2019-08-06
小天使·六年级语数英综合(2018年1期)2018-10-08
中国港湾建设(2017年11期)2017-12-19
专利代理(2017年1期)2017-07-21
高中生学习·高三版(2014年3期)2014-04-29
高中生学习·高三版(2014年3期)2014-04-29
