
水下无线传感器网络目标定位算法
2015-10-28 03:06吴斌,于乐
海军航空大学学报 2015年6期
吴 斌,于 乐
(1.海军航空工程学院研究生管理大队;2.中国联合网络通信有限公司烟台分公司,山东烟台264001)
水下无线传感器网络目标定位算法
吴斌1,于乐2
(1.海军航空工程学院研究生管理大队;2.中国联合网络通信有限公司烟台分公司,山东烟台264001)
提出了一种基于目标位置的定位转换算法,通过对水下声波传播衰减的研究,推导出距离与声强度的公式,进一步由节点接收到目标强度信息计算出节点与目标的距离进行定位。当目标处在水下传感器网络内部时,根据节点接收到信号强度的大小,进行加权质心定位算法。为解决三维坐标系下目标深度的计算,通过在海面设置大功率骨干节点,通过主动探测声呐测得目标的距离与角度,从而计算出目标深度。仿真验证表明,本文算法的有效性。
无线传感器网络;水下声波传播;目标定位
无线传感器网络因其方便快捷的自身特点越来越多地被运用到海洋里,因而水下无线传感器网络受到了越来越多学者的关注,其在海洋环境探测、海洋生物研究、海洋灾害预警及污染物监测等方面有着很多优势和潜在应用前景。但由于海洋水下环境特殊,如电磁波在水下传播距离极短,声波传播存在多径传播、散射、折射,节点传感器网络节点易受洋流变化移动、节点布设困难等,因而水下无线传感器网络面临诸多挑战。
文献[1]结合舰艇拖曳线列阵声纳实际搜潜装备,利用舰载声纳测得的潜艇目标方位和距离信息,建立了基于目标方位-距离量测的舰艇对潜艇目标定位的数学模型,并对定位误差进行了分析,在该模型基础上,仿真研究了潜艇与舰艇之间的初始距离、舰艇测得潜艇目标初始方位角、潜艇航向等因素对定位性能的影响。但对于深度的探测由于单声呐探测误差较大,该方法在水下目标深度探测上有一定局限性。文献[2]提出了一种基于水下传感器网络的目标协同定位改进方法。基于多重信号分类方法得到目标的DOA估计,通过对水下信号传输特性分析,建立水下阵列传感器网络的目标定位模型,并利用最大似然估计得到目标位置。利用基于阈值检测的分布式高斯牛顿迭代法完成最大似然估计的解算。但是该算法仅局限于目标处在水下线列阵中,当目标远离线列阵时,基于似然算法的定位误差将会变大。文献[3]提出一种分层结构的自组织无线传感器网络用于水下声音源的定位研究,在声音衰减模型基础上提出一种改进的非线性最小二秉算法以及极大似然算法,其局限性与文献[2]类似。文献[4]提出了一种新的无序观测量处理算法,利用节点动态分簇建立分布式跟踪结构,簇头节点收集子节点的观测量形成本地估计。基于这种分布式结构,利用Unscented粒子滤波(UPF)结合新观测量,产生粒子滤波的建议密度分布。由于水下噪声成分复杂,基于信号的的滤波方式将面临巨大的噪声误差考验。文献[5]通过将“传感器网络技术”和“声波传播衰减原理”相融合,进一步建立新的“基于传感器网络的水下未知声源定位方法”的数学模型,分析了该模型受反射波、环境噪声和噪声源距离变化影响程度,提出系统误差修正方法。文献[6]提出一种基于锚节点失效的、利用已定位节点帮助未知节点定位的算法。文献[7-11]主要研究了对于水下无线传感器网络布设的理念。本文在综合考量上述目标定位算法及布设方法的基础上提出了一种新的水下无线传感器网络布设及目标定位算法,解决了上述存在的目标深度及算法局限性问题。
1 水下环境简介
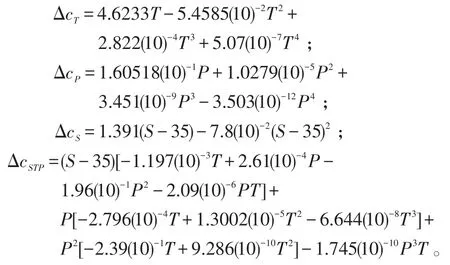
电磁波,无论是波长很长的无线电波,还是波长很短的紫外线,它们在海水中的传导性都很差。光在海水中的穿透能力与在大气中相比较也是很差的,在到达水下100m深度时,其能量已不到原来的百分之一。声音因其自身属性,常被用于在海水中进行探测和信息传输。海水中,声速经验公式为:

式(1)中:T为温度,且3℃<T<30℃;S为盐度,且33‰<S<37‰ ;P为静压力,且1.013×105N/m2<P<980×105N/m2。
在介质中,由于海水的吸收和不均匀性散射引起的声传播损失经常存在,实地进行传播损失测量时,很难把它们区分开,因而将二者综合起来考虑。假设平面波(扩展损失为0,声强度衰减仅由海水吸收引起)传播距离微分dx后,由于吸收引起的声强降低为dI,它的值应与声强I和dx成正比,则有

式(2)中:β为比例系数,正值;负号表示声强随距离增加而下降,积分式(2)得

I(1)是离声源等效声中心1m处的声强,取对数得

据声传播损失定义,并取10为底的常用对数得

定义吸收系数α为

则有TL=xα,结合声传播损失,声波在海水中船舶总损失为

式(7)中:n是常数;r为传播距离。
根据经验公式得

式(8)中:A=2.03×10-2;B=2.94×10-2;f是声波频率;fr为弛豫频率[12]。
2 目标运动模型
3 目标定位算法
在水下,利用声波进行目标定位,本文提出一种基于目标位置水下无线传感器网络跟踪定位转换算法,其主要思想是通过特殊的水下传感器网络布置,当目标距离传感器网络布置区域较远时,由探测到目标的节点子自组织成簇,进行定位跟踪。当目标处在传感器网络中时,由探测到目标信号最强的几个节点进行定位跟踪。值得注意的是,水下传感器网络中节点的探测距离往往比通信距离大,就当前水下技术而言,蓝绿激光在清澈无杂质的海水中最大穿透距离大约为300m,而声波在水下,通过海面、海底及深海声道等特殊信道传播,最远可达到几公里以上的距离。因此,水下无线传感器网络节点的探测能力往往远大于节点间的通信能力。
3.1目标远离监测区域
本文中水下布设的传感器节点均是普通节点,在网络布设区域上方海面上设置一个大功率浮标节点,负责将海底传感器节点搜集探测到的信息以无线电波信号的形式传输给岸上基站,如图1所示。

图1 水下传感器网络示意图Fig.1 Diagram of underwater wireless sensor networks
假设布置传感器节点完成后,节点已完成相互间定位,各自记录其一跳距离的邻居节点位置信息,除了海面上的骨干节点带有主动探测声呐外,其余节点均是被动声呐,目标信号强度为I(t),节点探测距离为r,通信半径为R,节点i被动声呐探测到目标的信号强度为是s(i)。则据式(7)有

对式(9)进行转化得

简化得

式(11)中:Q=αx;b=n·10;a=I(t)-s(i)+n·10lgα。
对式(11)求微分得

得Q=blge+C,C为常数。
则实际距离x(i)=10nlge+C。
探测到目标节点集合为

联立方程组:
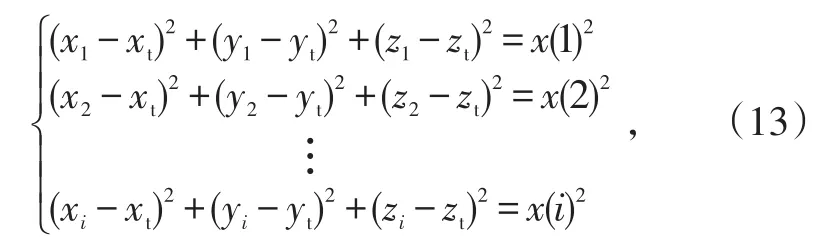
从而求得潜艇目标位置(xt,yt,zt)。需要注意的是,由于目标是处在三维坐标下,有可能出现只有1~2个节点接收到目标信号,所得方程组并不能准确求得其深度z,故本文采用第2种定位方法,如图2所示。

图2 水下传感器网络示意图Fig.2 Diagram of underwater wireless sensor networks
由于骨干节点自身携带的是主动探测声呐,其可以通过接收自身发射的指向性声波从而确定潜艇目标位置,骨干节点自身位置是(xg,yg,zg),探测到目标声波返回间隔为t。
目标深度可确定为

目标位置满足方程:

3.2目标处在监测区域内
当目标由远及近,运动到网络监测区域内部时,网络内部分的节点都能探测到目标。此时,对于目标的定位将采用加权质心定位算法,如图3所示。

图3 水下传感器网络示意图Fig.3 Diagram of underwater wireless sensor networks
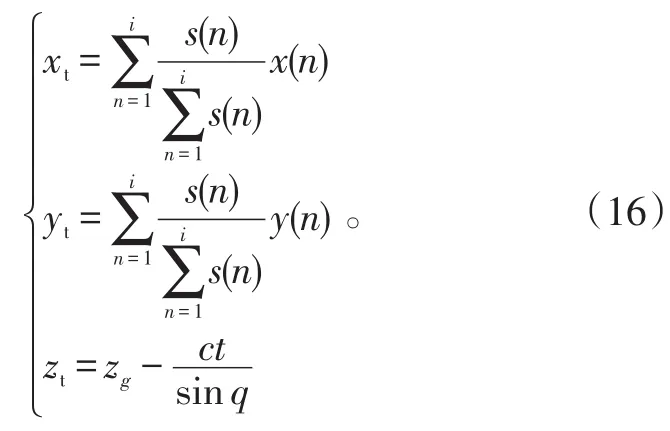
t1时刻,水下传感器节点接收到目标信号强度从大到小的排序依次是(s(1),s(2),s(3),…,s(i)),则其对应的节点坐标为

则目标估计坐标为:
4 节点协同
由于水下传感器节点自身携带海水电池的能量限制,节点间需要协作式对目标进行跟踪,基于跟踪定位转换算法思想是:当目标距离传感器网络较远时,由探测到的节点进行轮换定位跟踪;当目标处于传感器网络中时,由全网中的传感器节点进行定位跟踪。具体过程如下:
1)当水下节点接收到目标信号时,向其一跳距离内邻居节点发送探测到目标的信息,其内容包括唤醒信息、探测强度、时间、发现目标节点的位置;
2)邻居节点接收到消息后,开始工作;
3)接收到信号强度的节点开始通过竞选函数进行簇头选举;
4)簇成员将信息发送给簇头,由簇头进行计算,并将信息传输给骨干节点;
5)当目标运动到网络内部时,为提高目标定位跟踪精度,采用基于信号强度的加权质心跟踪算法。
由于声音在海水里的多径效应及海面海底的折射反射,其能传播很远的距离,但是,在水下声速较无线电波慢很多,考虑到传感器网络实时性检测的本质,故提出基于骨干节点位置及节点能量的簇头竞选函数:

5 仿真与分析
假设海底均是平坦泥沙质底面,深度300m,在60km×60km的正方形海底面布设水下无线传感器节点,其探测半径为20km,节点间距离为1.5km,布置1 600个节点,n取1,α=0.1,目标声强为100 dB,目标速度为10 km/h,直线运动,背景噪声40 dB,仿真结果如图4、5所示。

图4 轨迹对比图Fig.4 Diagram of trajectory constracting

图5 算法误差对比图Fig.5 Diagram of algorithm error
从图4、5中可以看出,加权质心算法的精度较好,但是,当目标远离传感器区域时,基于加权质心算法目标定位误差很大,该算法有效性仅仅在目标处于传感器网络内,基于信号衰减的目标定位算法能够捕捉并定位目标,但是定位误差较大。本文提出的算法,能够很好的结合上述2种算法的优点,对于水下无线传感器网络目标定位研究有一定的帮助。
6 结束语
随着海洋贸易的逐渐繁荣,水下无线传感器网络的研究必将迎来更大的突破。本文对水下无线传感器网络目标定位进行了研究,结合信号衰减及加权质心算法,提出了一种基于目标位置的定位转换算法,该算法能够准确的捕捉到目标并进行定位,但还是存在一些待改进的方面:信号衰减中可以加入混响,声波改为球面波传播,可以加入能量算法。这些都是以后研究工作需要突破的方面
[1]崔旭涛,杨日杰,何友.基于方位—距离量测的舰艇搜潜定位算法研究[J].测试技术学报,2009,23(6):491-495. CUI XUTAO,YANG RIJIE,HE YOU.Research on localization algorithm of ships search antisubmarine based on bearing-range measurement[J].Journal of Test and Measurement Technology,2009,23(6):491-495.(in Chinese)
[2]张子涵,曾庆军,王彪.基于分布式水下无线传感器网络目标协同定位方法[J].研究科学技术与工程,2012,12(15):3615-3618. ZHANG ZIHAN,ZENG QINGJUN,WANG BIAO.Research of target location in distributed underwater wireless sensor networks[J].Science Technology and Engineering,2012,12(15):3615-3618.(in Chinese)
[3]徐建华,任超.基于传感器网络的水下声音源定位方法研究[J].计算机测量与控制,2011,19(7):1681-1683. XU JIANHUA,REN CHAO.Research of underwater audio source based on sensor networks[J].Computer Measurement and Control,2011,19(7):1681-1683.(in Chinese)
[4]薛锋,刘忠,曲毅.基于Unscented粒子滤波的无序观测下水下无线传感器网络目标被动跟踪[J].传感技术学报,2007,20(12):2653-2658. XUE FENG,LIU ZHONG,QU YI.Target passive tracking based on unscented particle fi lter with out-of-sequence measurements in underwater wireless sensor networks[J].Chinese Journal of Sensors and Actuators,2007,20(12):2653-2658.(in Chinese)
[5]张涵,付斌,刘纯虎,等.一种水下未知声源定位方法的研究[J].计算机测量与控制,2011,19(9):2220-2226. ZHANG HAN,FU BIN,LIU CHUNHU,et al.Research on underwater positioning for unknown sound source[J].Computer Measurement and Control,2011,19(9):2220-2226.(in Chinese)
[6]管文冰,朱志文,刘林峰,等.一种基于锚节点失效的UWSN定位算法[J].计算机技术与发展,2015,25(3):218-222. GUAN WENBING,ZHU ZHIWEN,LIU LINFENG,et al.A localization algorithm based on anchored node failure for underwater sensor network[J].Computer Technology and Development,2015,25(3):218-222.(in Chinese)
[7]罗强,潘仲明.一种小规模水下无线传感器网络的部署算法[J].传感技术学报,2011,24(7):1043-1047. LUO QIANG,PAN ZHONGMING.An algorithm of deployment in small-scale underwater wireless sensor networks[J].Chinese Journal of Sensors and Actuators,2011,24(7):1043-1047.(in Chinese)
[8]睿智,王玲.水下无线传感器网络协作式节点定位方法[J].传感器与微系统,2010,29(10):141-144. RUI ZHI,WANG LING.An algorithm of deployment small-scale underwater wireless sensor networks[J]. Transducer and Microsystem Technologies,2010,29(10):141-144.(in Chinese)
[9]姚西.水下无线传感器网络定位技术综述[J].现代电子技术,2013,36(7):11-18. YAO XI.Summary of localization technologies for underwater wireless sensor networks[J].Modern Electronics Technique,2013,36(7):11-18.(in Chinese)
[10]李世伟,王文敬,张聚伟.基于潜艇深度的水下传感器网络部署术[J].传感技术学报,2012,25(1l):1613-1617. LI SHIWEI,WANG WENJING,ZHANG JUWEI.An underwater sensor networks deployment algorithm based on submarine depth[J].Chinese Journal of Sensors and Actuators,2012,25(1l):1613-1617.(in Chinese)
[11]刘禹.基于运动模型的水下传感器网络节点定位算法的研究[D].长春:吉林大学,2015. LIU YU.The research of localization algorithm for underwater wireless sensor networks based on mobility model[D].Changchun:Jilin University,2015.(in Chinese)
[12]刘伯胜,雷家煜.水声学原理[M].哈尔滨:哈尔滨工程大学出版社,2013:25-35. LIU BOSHEN,LEI JIAYU.Underwater acoustics principle[M].Haerbin:Harbin Engineering University Press,2013:25-35.(in Chinese)
Algorithm of target location in Underwater Wireless Sensor Networks
WU Bin1,YU Le2
(1.Graduate Students’Brigade,NAAU;2.Yantai Branch of China United Network Communication Co.Ltd.,Yantai Shandong 264001,China)
A algorithm of transition location based on position of target was proposed.Through the research of underwater acoustic propagation attenuation,the formula between distance and acoustic intensity was deduced,ulteriorly,through the target’s acoustic intensity nodes detecting to calculate the position due to the distance between target and nodes.When tar⁃get was in underwater wireless sensor networks,the position of target was calculated by weighted centroid due to the signal intensity nodes get.Through the high power backbone nodes sea surface set,the distance and angle received by active so⁃nar,to calculate the depth of target.The effectiveness of the algorithm was verified by the simulation experiment.
wireless sensor network;underwater acoustic propagation;target location
TP393
A
1673-1522(2015)06-0577-05DOI:10.7682/j.issn.1673-1522.2015.06.015
2015-09-22;
2015-10-08
教育部新世纪人才支持计划基金资助项目(NCET-11-0872)
吴斌(1992-),男,硕士生。
猜你喜欢
无线互联科技(2021年4期)2021-04-21
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年23期)2018-12-26
小学生导刊(2018年34期)2018-12-18
电子制作(2018年19期)2018-11-14
小猕猴智力画刊(2017年6期)2017-07-03
小溪流(画刊)(2017年5期)2017-06-15
山东青年(2016年3期)2016-02-28
母子健康(2015年1期)2015-02-28
