
国外木星系环绕飞行任务规划研究
2015-10-28 03:35董捷孟林智赵洋马继楠
航天器工程 2015年3期
董捷 孟林智 赵洋 马继楠
(北京空间飞行器总体设计部,北京 100094)
国外木星系环绕飞行任务规划研究
董捷 孟林智 赵洋 马继楠
(北京空间飞行器总体设计部,北京 100094)
调研了国外3项典型的木星系环绕任务(伽利略号、朱诺号和木星冰卫星探测器(JUICE)),归纳总结了行星借力飞行、利用天体摄动演化轨道、高精度导航、限制近木点高度以及利用飞越实现任务拓展等任务规划方法。最后,提出了我国木星系环绕探测任务规划的初步设想,即以木星和木卫二为主要探测目标,采用金星-地球-地球的地木转移借力序列,以及基于木卫二、木卫三和木卫四借力方式开展木星系探测任务规划,实现飞掠、环绕和穿透多种方式的木星系探测任务。
木星系;借力飞行;飞行任务规划;导航
1 引言
近些年,木星等巨行星探测已成为美国和欧洲深空探测的中长期战略目标之一,其关注重点是通过巨行星的探测结果,系统研究太阳系的起源和演化,以及行星的形成过程,寻找这些天体上可能存在的生命形态。根据目前探测的结果发现,木卫二、木卫三可能存在丰富的地下海洋[1],具备了生命存在的重要基础条件之一,因此成为木星系探测的研究热点。其实,国外早在40年前就开展了木星系探测,但早期主要是开展木星系飞越探测:1973年12月先驱者10号最先与木星交会并飞越,发回了木星的近距离照片并提供了有关木星磁场性质、大气成分与动力学的资料[1];后续先驱者11号、旅行者1号和2号、尤里塞斯号太阳探测器、卡西尼-惠更斯号土星探测器和新地平线(亦称新视野)号冥王星探测器,都在飞行过程中顺访过木星,利用有效载荷开展可见光与红外成像、粒子和磁场探测等活动,但由于飞越探测的交会时间较短,探测成果有限。
首次实现木星环绕探测的是美国1989年发射的伽利略号探测器,在与木星交会前还释放了大气穿透器,实现了对木星大气环境的探测。在环绕木星期间,通过任务规划,实现了多次飞越其4颗最大的自然卫星,包括木卫一、木卫二、木卫三和木卫四。为进一步对木星的引力场、磁层、大气环境、极光等开展深入探测,2011年美国又发射了朱诺号探测器,预计2016年到达木星开展极轨环绕探测。与此同时,欧洲航天局也在筹划木星冰卫星探测器(Jupiter Icy Moon Explorer,JUICE)任务,计划2022年发射,将首次实现在一次任务中同时环绕探测木星和木卫三。
木星系探测任务的距离遥远,任务周期长,技术难度大,需要在有限的测控条件、能源、数据传输时延等约束条件下,合理高效地规划多目标、多任务的探测过程。本文首先分析了伽利略号、朱诺号和JUICE三个典型任务的飞行规划,梳理了任务特点及启示,根据木星系探测的任务特点,分别从轨道设计、导航方法设计等方面提出了我国未来木星系环绕探测任务的规划设想。
2 木星系的概况
2.1 基本物理参数
作为太阳系最大行星,木星是其他行星质量总和的2.5倍,其距太阳距离远,自转周期短,与地球的主要参数对比见表1。木星及其主要卫星的物理参数介绍见文献[1-2]。
木星也是人类迄今为止发现的天然卫星最多的行星,目前已发现67颗卫星,其中最大的4颗卫星分别为木卫一、木卫二、木卫三和木卫四。它们于1610年由伽利略首次发现,因此也称为伽利略卫星,其轨道和物理参数见表2[1-2]。木卫一、木卫二、木卫三受引潮力影响(引潮力是以下两种力的合力:卫星上单位质量物体受到的主天体引力和卫星绕主天体-卫星公共质心旋转时产生的惯性离心力),其公转关系为严格的1∶2∶4,这一现象称为轨道共振。木卫四与其它3颗卫星的共振并不严格。4颗卫星中,体积最大的是木卫三,最小的是木卫二。

表1 木星和地球的主要参数比较Table 1 Comparison of the key parameters of Jupiter and the Earth
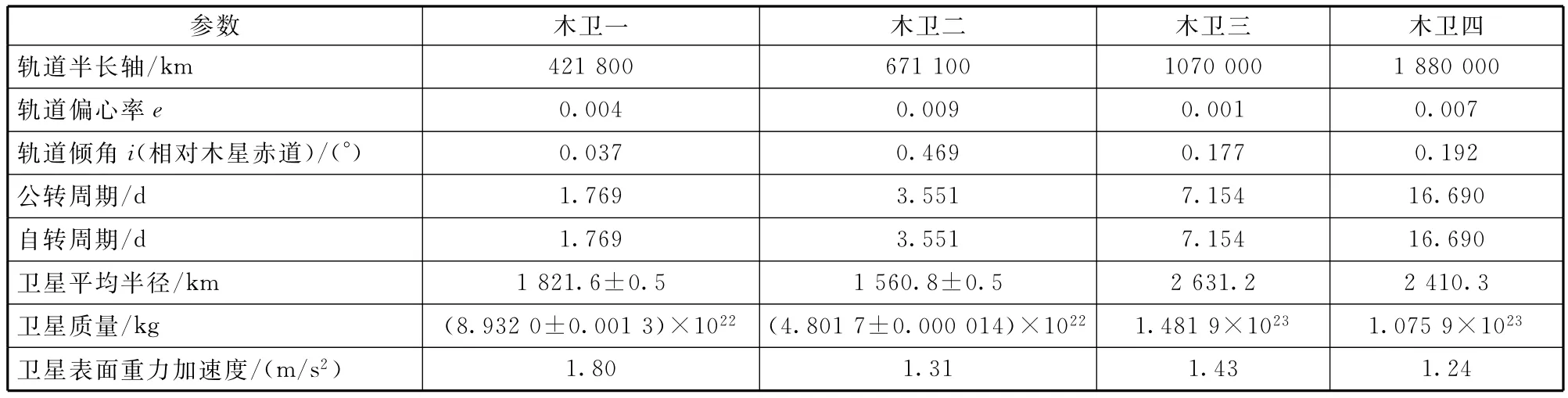
表2 木星卫星的轨道和物理参数Table 2 Orbital and physical parameters of the Galileo satellites of the Jupiter
2.2 辐射带概况
木星具有强大的磁场,在太阳风作用下,形成了环绕木星的辐射带结构,其类似于地球的范·艾伦辐射带。此外,由于木星磁场覆盖范围广和快速的自转角速度,使得从木卫一释放的等离子体也与木星一起以很快的速度共转,形成一个环绕木卫一轨道的冷等离子体环面。木星磁层及辐射带结构如图1所示(左上角为地球磁层结构,右下角可以看到木卫一形成的等离子体环面)。
木星辐射带高能质子(>100 Me V)通量很小,但低能质子通量约是地球辐射带的10倍;木星辐射带低能电子通量与地球辐射带基本相当,但在高能端木星辐射带电子通量要比地球辐射带高2~3个数量级,尤其是木星辐射带中还存在较多能量超过10 MeV的高能电子,这些都直接影响探测器的防护设计。
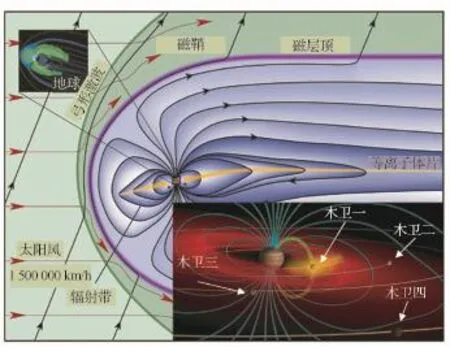
图1 木星磁层和辐射带示意图Eig.1 Schematic diagram of Jupiter's magnetosphere and radiation belt
3 国外典型木星系探测器的飞行任务规划
3.1 伽利略号的飞行任务规划
伽利略(Galileo)号木星探测器的主要任务是对木星、4颗木星卫星进行探测。
探测器于1989年10月18日由阿特兰蒂斯号航天飞机发射升空,地木转移过程中经过金星-地球-地球借力飞行后,于1995年12月进入环绕木星的大椭圆轨道,成为首颗进入木星轨道的探测器,并采用再入探测方式首次对木星大气进行了详细测量。在地木转移过程中,还分别实现了对主带小行星盖斯普拉(Gaspra)和艾达(Ida)的飞越探测。
在近木制动前首先进行了木卫一借力,使近木制动速度增量减小了约100 m/s。由于4颗木星卫星轨道周期短,伽利略号探测器环绕木星形成大椭圆轨道后,通过调整探测器轨道周期为木星卫星周期的整数倍实现了与4颗木星卫星多次交会,获取了木星结构、大气、磁场、行星环以及木卫表面形貌等较为全面的信息。任务期间共实现飞越木卫一7次、木卫二11次、木卫三8次、木卫四8次[3]。飞行全过程如图2所示。
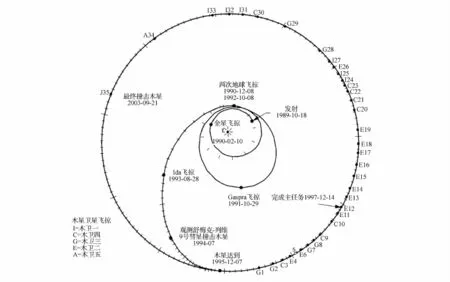
图2 伽利略号探测木星系的飞行任务过程示意图Eig.2 Schematic diagram of Galileo's flight to the Jovian system
为实现与木星卫星交会,防止与木星卫星相撞,在相邻两次木卫飞越过程中,正常安排了3次轨道修正机动,其中第3次修正利用了探测器下传的目标卫星图像进行轨道确定,文献[4]对这种导航方法进行了研究(见图3)。
该方法是通过地面系统综合测距测速数据、甚长基线干涉测量(VLBI)测角信息以及下传的目标卫星光学图像,估计参考历元下探测器的轨道参数。通过引入天体的光学图像使导航精度大为提高,由几百千米提高到几十千米[5],保证了轨道安全,减小了修正速度增量,从而为后续扩展任务提供了较为充足的推进剂。伽利略号最初任务设计是实现木星卫星的11次飞越,实际在轨共实现了34次飞越。
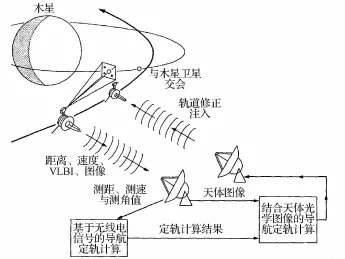
图3 伽利略号任务的地面导航系统示意图Eig.3 Schematic diagram of the ground navigation system for the Galileo spacecraft
根据以上分析,伽利略号探测器在飞行任务规划中的特点如下:
(1)采用借力飞行技术,通过地木转移过程多次天体借力,降低了对火箭运载能力的需求;
(2)通过地木转移的轨道设计,实现了对两个主带小行星的顺访飞越探测,扩展了探测成果;
(3)在多次飞越木星卫星前的轨道修正中,增加了地面下传天体图像进行导航的方式,提高了定轨精度,降低了对推进剂的需求。
3.2 朱诺号飞行任务规划
朱诺(Juno)号探测器采用了两次深空机动和一次地球借力方式到达木星,飞行过程如图4所示[6]。朱诺号于2011年发射,预计2016年到达木星后将通过制动被木星捕获,首先进入轨道周期为78 d的环木极轨,近木点轨道高度为4500 km。下一次运行到近木点时降低远木点高度,进入轨道周期为11 d的环木星使命轨道,远木点半径约39 RJ(RJ为木星半径),探测重点是在近木点附近开展为期1年的科学探测。图5为朱诺号任务期间的轨道变化及与木星辐射带的关系[7]。序号1表示环绕后的第1轨,序号16为中间1轨,序号31为最后1轨,可见其近木点逐渐向北极漂移,但任务期间近木点始终处于木星内部辐射相对较低的区域。
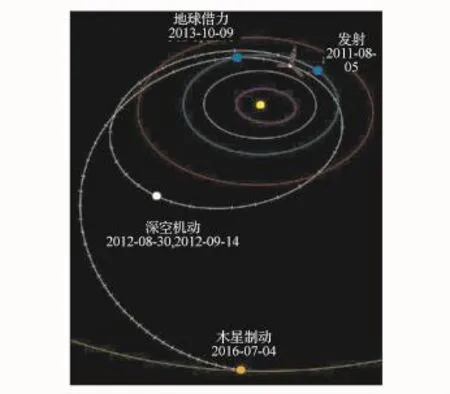
图4 朱诺号地木转移轨道Eig.4 Juno's interplanetary trajectory
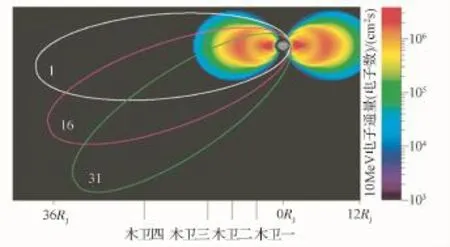
图5 朱诺号轨道与木星辐射带Eig.5 Juno's trajectory and Jupiter's radiation belt
朱诺号的设计特点包括:
(1)地木转移过程中采用了1次地球借力和2次深空机动的飞行方案(见图4),虽然比伽利略号的飞行方案增加了推进剂消耗,但可以实现提前约1年到达木星,便于尽早开展探测;
(2)朱诺号探测器利用木星辐射带的分布特点,将初始近木点设置在木星赤道面附近,可极大地减少探测器的辐射剂量。受木星引力摄动的影响,朱诺号的使命轨道拱线与赤道夹角每圈增加0.9°,逐渐远离赤道面,使探测器每圈轨道进入辐射区的时间逐渐增加(见图5)。为减少任务期间的总辐射量,朱诺号采用了由北向南的木星捕获策略,相比于从南向北的捕获方式,初始近木点可更接近木星赤道。
3.3 JUICE飞行任务规划
JUICE是目前最复杂的木星系探测任务,文献[8]对JUICE的方案设想进行了介绍。探测器计划2022年6月用阿里安-5火箭在库鲁发射场发射。地木转移时间为7.6年,采用地球-金星-地球-地球借力序列。到达木星前,先采用木卫三借力,然后实现2次木卫二飞越,利用木卫四借力实现轨道倾角变化,再经过木卫三和木卫四的多次借力,降低进入木卫三速度后制动进入环绕木卫三的大椭圆轨道,最后形成200 km高度的圆轨道开展高分辨率遥感探测。
整个飞行过程中,重要阶段包括木星制动、木卫四飞越和木卫三环绕。
1)木星制动
接近木星时选取木卫三借力飞行,减小了制动速度增量约300 m/s,制动后首先进入13RJ/243RJ的轨道,该轨道与木卫三形成25∶1的共振轨道(即探测器的轨道周期是木卫三轨道周期的25倍,保证每个周期结束时仍可与木卫三在相同的位置相遇)。
2)木卫四飞越
通过木卫四与木卫三间的多次借力进入木卫四共振轨道。通过6次重复木卫四借力使轨道倾角增加到29°,可以观测到木星南北纬63°以上的木星极区,实现木星高纬度探测。到达最大倾角后,再采用相同的策略降低倾角至接近零。
3)木卫三环绕
JUICE采用太阳翼供电方式,由于木星附近的太阳常数低,对光照和阴影的关系较为敏感,因此任务设计时在环绕木卫三初期先进入200 km/10 000 km极轨,后期形成低高度圆轨道。
整个任务期间,初始进入环绕木卫三轨道时β角(太阳矢量与轨道面夹角)约25°,进入500 km圆轨道时β角增大至60°,至200 km轨道末期达到86°。在保证光学载荷成像需求的条件下满足探测器功率平衡。对初始形成的大椭圆轨道,木星系内的摄动较为明显,会引起轨道高度和拱线的变化。通过选择特定的近心点幅角后,形成了如下轨道变化规律:前30天内轨道逐渐圆化,形成5000 km高度圆轨道,在该轨道上保持约90 d,随后偏心率逐渐增加,直至轨道再恢复至200 km/10 000 km。这个阶段轨道远心点处于木卫三的光照期间,可以利用光学载荷开展长时间成像观测;而且由于近心点幅角不同,更有利于对木卫三表面区域的成像覆盖。整个过程如图6所示。[8]
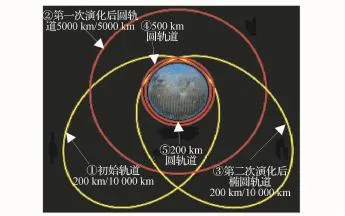
图6 环绕木卫三的轨道阶段Eig.6 Phases of orbiting Ganymede
根据以上分析,JUICE飞行任务的特点如下:
(1)采用借力飞行技术,通过地木转移过程多次天体借力加速,降低了对火箭运载能力的需求;利用木星系内木星卫星开展多次飞越,实现飞越探测和借力减速。通过借力使任务过程所需的总速度增量大大降低,相比伽利略号可进一步实现对木卫三的环绕探测。此外,通过对木卫四的多次借力,提高了相对木星和木卫四的轨道倾角,实现了对高纬度地区的观测。
(2)近木制动时直接选择了距木星相对较远的木卫三借力,并把木卫三作为最终的环绕探测目标。
(3)利用了木卫三的引力摄动特性,进入木卫三轨道后,通过经历200 km/10 000 km椭圆轨道→5000 km圆轨道→200 km/10 000 km椭圆轨道演化过程,减少了轨道维持所需速度增量,实现了较长时间对木卫三表面中低分辨率的光学观测,当β角达到较为接近垂直轨道面时再降轨至200 km圆轨道,保证功率平衡。
3.4 任务特点及启示
根据对国外木星系环绕探测任务飞行任务的分析结果,可以得出以下结论:对于木星这类远距离、环境复杂的行星探测,受系统质量等资源限制,任务规划设计极大地受飞行轨道、导航能力的制约,必须加以创新才能有效地提高探测成果。
3.4.1 充分利用借力飞行技术
(1)利用借力飞行技术实现对探测器的加速或减速。根据霍曼变轨,初步估算从地球直接转移至木星的发射能量和到达能量,地球发射C3(C3为相对天体无穷远处速度的平方,反映了对运载器发射能量的需求)约为77.3 km2/s2,到达木星的C3约为31.8 km2/s2。这对火箭的运载能力要求很高,因此木星任务与火星、金星探测的一个显著区别是通常需要使用行星借力方式来降低发射能量;此外,有木星卫星环绕任务的探测器,对探测器自身速度增量需求也很大,要求地木转移和木星系内尽可能优化速度增量。伽利略号在任务初期曾计划采用大型火箭发射直接进入地木转移轨道,受运载器研制进度影响,转而采用金星-地球-地球借力方式。文献[9]对该借力方式进行了详细分析,通常2~3年就存在可行的发射窗口。到达木星后,通过大质量木星卫星(伽利略卫星)的减速借力,减少近木制动的速度增量。JUICE在地木转移过程中除采用多次借力飞行,在环绕木星后继续利用这些卫星的共振轨道,最终以很少的速度增量代价实现环绕木卫三。
(2)利用借力飞行调整轨道倾角。木星卫星的轨道均集中在木星赤道平面内,JUICE探测器为实现木星卫星频繁借力,初始进入木星系时轨道平面接近木星赤道,但通过对木卫四的多次借力抬高了轨道倾角,从而也实现了对木星高纬度极区的探测。
3.4.2 利用天体的摄动特性优化轨道控制策略
由于木卫三处于木星系多天体环境中,受木星以及其它木星卫星的影响,探测器环绕轨道会受到较强的摄动影响。JUICE探测器巧妙利用了木卫三的引力摄动特性,减少了环绕轨道维持所需的速度增量,可以充分利用该轨道阶段开展有效载荷科学探测。当β角(太阳矢量与轨道面的夹角)达到较为接近垂直轨道面时,再进入低高度圆轨道开展高分辨率探测。如果初始直接进入低高度环绕轨道,受β角变化影响,若要满足功率平衡,无论在质量资源还是系统设计上都面临挑战。
3.4.3 以高精度导航为任务的基础
对于木星系这类远距离深空探测任务,由于地面测定轨精度已经明显降低,天地传输时延大大增加,必须通过探测器近距离对天体实际观测来提高轨道确定精度,保证交会、借力等任务的完成。早期的伽利略任务是探测器提前下传多幅原始图像,由地面系统结合直接测轨数据进行轨道确定,导航计算交由地面完成,对改善轨道确定精度,准确飞越目标卫星起到了重要作用。由于轨道高度越低对应的借力飞越越有效,如果能够实现高精度导航,可以尽可能降低天体飞越高度,从而有效减少借力飞越次数和轨道修正次数,降低速度增量需求。并且接近天体时轨道高度降低,还利于光学相机、穿透雷达等有效载荷提高表面探测精度。
未来的发展方向是采用基于目标天体成像和自主轨道外推的自主导航定位策略,从而解决上下行时间延迟、天体遮挡、日凌等条件对天地交互过程带来的风险,减少地面测定轨较大误差时存在的风险,保证轨道安全。
3.4.4 限制近木点高度的因素
木星系内特有的辐射环境直接影响了探测器的工作寿命。除最靠近木星的低辐射区,探测器与木星距离越近,对应的辐射强度越大,因此应限制近木点高度,以降低探测器所受到的累积辐射影响。伽利略号在近木制动前由于要对木卫一借力,近木点高度较低。为减少长期的辐射影响,在近木制动后第一圈轨道远木点附近进行了抬高近木点机动。朱诺号由于需要近距离对木星观测,转而考虑采用更低的轨道高度,使近木点处于赤道附近辐射带内侧的低辐射区;同时采用由北向南降轨近木制动进一步降低辐射影响。JUICE近木制动时直接选择了距木星相对较远的木卫三借力,并把木卫三作为最终的环绕探测目标。木卫一、木卫二、木卫三的辐射环境如图7所示[10],在采用8 mm铝屏蔽防护的条件下,木卫三附近辐射总累积速率约0.3 krad/d,远小于木卫一和木卫二(10~15 krad/d)。
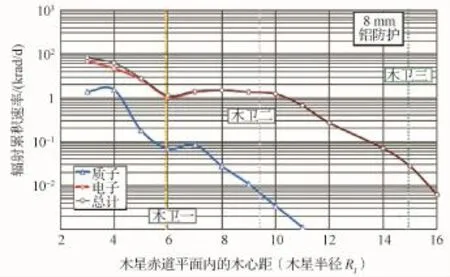
图7 采用8 mm铝防护的辐射累积速率与木星距的关系Eig.7 Radiation dose rate of 8 mm Al shield with distance between probe and Jupiter in Jovian equatorial plane
3.4.5 利用飞越顺访以拓展任务成果
为在一次深空任务中扩大探测成果,可以充分利用飞越天体的机会开展成像与环境探测。地木转移过程中如采用金星借力,可以在金星飞越时开展观测;向木星转移时必然经历火星和木星之间的主带小行星,因此通过优化轨道设计可以实现对部分主带小行星的飞越[11],伽利略号在地木转移过程中就成功飞越了两个主带小行星,开展了近距离成像。JUICE在木星系内飞越木卫二时,设计了在近心点进行木卫二表面的详细观测,包括光学成像和次表层雷达对水冰和地形的探测。在环绕木卫三前,飞越木卫二、木卫三、木卫四时尽可能开展顺访探测。
4 我国木星系任务规划的初步设想
我国已经提出在2030年前开展对木星系的环绕探测,借鉴前文介绍的国外木星系环绕探测任务规划,对我国首次木星系环绕探测提出如下设想:
(1)根据对科学探测需求的分析,木星系探测的主要目标为开展木星和木卫二的环绕探测,以及其它借力天体的飞越探测。
(2)通过探测木星大气、磁场、等离子体与高能粒子分布,获取木星表面高分辨率和高光谱图像信息,研究木星系统的起源与演化。
(3)探测木卫二形貌、表面成分、内部结构、磁场、大气成分、空间粒子分布等,研究木卫二的形成和演化;探测木卫二的冰层、液态海洋等可能的生命信息,探索其存在生命的可能性。
任务飞行过程初步规划如下:
1)地木转移
根据对借力飞行发射窗口的分析,2030年前后满足1次金星加2次地球借力的发射窗口在2028年3月,2029年11月和2031年4月[9]。根据深空探测规划和我国的技术基础,可抓住这些窗口时机开展一次木星环绕探测任务。至2028年,在发射C3不大于18 km2/s2的条件下,可采用长征-5火箭发射探测器首先进入地-金转移轨道,运载能力约5000 kg。考虑干质量设计能力,探测器全任务期间能够提供约3.4 km/s的总速度增量。地木转移过程中尽可能飞越部分主带小行星。
2)木星系内飞越
为减少近木制动速度增量,借鉴JUICE的制动方案,到达近木点前首先近距离飞越木卫三,然后开始近木制动进入大椭圆环木轨道。一方面规避近距离借力的辐射影响,另一方面提高借力减速的效果,并借机开展木卫三观测。由于木卫二较木卫三更靠近木星,因此借力方式与JUICE存在一定区别,初步分析后续直接转移至木卫二的借力序列可以采用多次木卫二、木卫三和木卫四的借力到达木卫二。借鉴JUICE的思路,择机通过借力调整轨道倾角实现对木卫二、木卫三、木卫四以及木星高纬度区域近距离观测。
3)木卫二环绕
经过前面多次借力后,以较小速度增量减速进入木卫二环绕极轨,开展木卫二的环绕探测,由大椭圆轨道逐渐过渡到低高度圆轨道。针对太阳翼供电探测器,需要借鉴JUICE的设计,选择合适时机进入低高度圆轨道,并择机释放穿透器,开展短期木卫二表面水冰探测,以拓展探测成果。
在整个任务期间的关键变轨前,下传天体图像由地面进行轨道确定。出现日凌时采用轨道器自主导航提高定轨精度,保证轨道安全。整个飞行任务初步设想如图8所示。

图8 我国未来木星系环绕探测任务规划设想Eig.8 Schematic diagram of future China's Jovian system orbiting mission planning
5 结束语
木星系探测是继火星探测后深空探测的重要领域,不仅对太阳系演化与地外生命探索等科学理论研究具有重要意义,而且可以极大地带动行星探测技术能力提升。根据国外已经开展的伽利略号、朱诺号任务以及正在论证的JUICE木星系任务可以发现,针对木星系距离远、木星大质量卫星多、木星磁场及辐射环境强、引力场环境复杂等特点,利用多天体借力等方式充分开展飞行任务规划,可以降低对运载火箭发射能量需求和探测器的设计难度,并拓展任务成果。未来我国的木星系探测任务也需要兼顾对木星和木星卫星的探测,尽可能多地获得巨行星系第一手探测数据。在飞行任务规划上需要充分利用多天体借力、天体特殊引力环境演化轨道、高精度相对导航等手段,以较小的工程代价实现最终的短期木卫二环绕以及穿透任务。这些设计思想可以为后续我国的木星系环绕探测任务提供参考和借鉴。
(
)
[1]肖龙.行星地质学[M].北京:地质出版社,2013 Xiao Long.Planetary geology[M].Beijing:Geological Publishing House,2013(in Chinese)
[2]焦维新,邹鸿.行星科学[M].北京:北京大学出版社,2009 Jiao Weixin,Zou Hong.Planetary science[M].Beijing:Peking University Press,2009(in Chinese)
[3]Michael Meltzer.Mission to Jupiter:A history of the Galileo project,NASA SP-2007-4231[R].Washington D.C.:NASA,2007
[4]房建成,宁晓琳.深空探测器自主天文导航方法[M].西安:西北工业大学出版社,2010:11-18 Eang Jiancheng,Ning Xiaolin.Autonomous celestial navigation methods for deep space explorers[M].Xi' an:Northwestern Polytechnical University Press,2010:11-18(in Chinese)
[5]L J Miller,J K Miller,W E Kirhofer.Navigation of the Galileo mission[C]//21st Aerospace Sciences Meeting.Washington D.C.:AIAA,1983:1-19
[6]T Kowalkowski,J Johannesen,T Lam.Launch period development for the Juno mission to Jupiter[C]// AIAA/AAS Astrodynamics Specialist Conference and Exhibit.Washington D.C.:AIAA,2008:1-13
[7]Steve Matousek.The Juno new frontiers mission[C]// 56thInternational Astronautical Congrass.Euduoka,Japan,the International Astronautical Eederation,2005
[8]The JUICE Scicence Study Team.JUICE exploring the emergence of habitable worlds around gas giants[R].Assessment Study Report.Paris:ESA,2011
[9]Anastassios E Petropoulos,James M Longuski,Eugene P Bonfiglio.Trajectories to Jupiter via gravity assists from Venus,Earth and Mars[C]//AIAA/AAS Astrodynamics Specialist Conference and Exhibit.Boston.Washington D.C.:AIAA,1998:116-126
[10]Alessandro Atzei,Arno Wielders,Anamarija Stankov,et al.Overview of the ESA Jovian technology reference studies SCI-AP/2004/TN-085/AA[R].Netherlands:ESA,2007
[11]陈杨,宝音贺西,李俊峰.木星探测轨道分析与设计[J].天文学报,2012,53(2):106-118 Chen Yang,Baoyin Hexi,Li Junfeng.Jupiter exploration mission analysis and trajectory design[J].Acta Astronomica Sinica,2012,53(2):106-118(in Chinese)
(编辑:李多)
Demonstration of Foreign Jovian System Orbiting Mission Plan
DONG Jie MENG Linzhi ZHAO Yang MA Jinan
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
This paper investigates three typical Jovian system orbiting missions—Galileo,Juno and Jupiter Icy Moon Explorer(JUICE).It summarizes the missions'planning method,including gravity assists of planet,trajectory evolution with celestial perturbation,high precision navigation,Jovian periapsis altitude control and mission extension with flybys.This paper finally proposes a primary mission conceive of China's Jovian system orbiting mission,i.e.to set the main target of exploring Jupiter and Europa,apply Venus-Earth-Earth gravity assist and plan the flight mission based on Ganymede,Europa and Callisto assist to explore the Jovian system in different ways of flyby,orbiting survey and planet's surface penetration.
Jovian system;gravity assist;mission planning;navigation
V476.4
A DOI:10.3969/j.issn.1673-8748.2015.03.014
2015-02-12;
2015-03-18
董捷,男,工程师,从事深空探测总体设计工作。Email:donghn13@163.com。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
思维与智慧·上半月(2021年4期)2021-04-29
科学中国人·下旬刊(2020年8期)2020-11-09
小学科学(2019年5期)2019-06-11
金桥(2018年7期)2018-09-25
探索科学(2017年5期)2017-06-21
中国新闻周刊(2017年8期)2017-03-21
军事文摘·科学少年(2016年8期)2016-11-02
太空探索(2015年3期)2015-07-12
