孤岛电网中多储能设备SOC一致性优化策略
2015-10-25 02:34:20王炜信段建东张润松国海峰孙力
电工技术学报 2015年23期
王炜信段建东张润松国海峰孙力
(1.哈尔滨工业大学电气工程及其自动化学院哈尔滨150001 2.中国石油装备制造分公司北京100007)
孤岛电网中多储能设备SOC一致性优化策略
王炜信1段建东1张润松2国海峰1孙力1
(1.哈尔滨工业大学电气工程及其自动化学院哈尔滨150001 2.中国石油装备制造分公司北京100007)
基于下垂控制策略的蓄电池储能管理方案被广泛应用于孤岛电网,但在放电过程中并联蓄电池储能设备相互间将出现电荷状态(State of Charge,SOC)差异,使某些储能设备提前退出运行,显著削弱了系统稳定性。针对上述问题,提出一种适用于多储能设备的SOC一致性控制策略,并进行优化。将SOC作为下垂控制器输入量,根据SOC实时调节储能设备的输出功率,使并联储能设备的SOC在放电过程中逐渐趋于一致,进而在孤岛电网频率偏移约束以及逆变器最大输出有功功率限制下对加速因子进行在线优化,显著减少了并联蓄电池储能设备间SOC最终差值,达到更佳的均衡效果。仿真与实验结果验证了SOC一致性优化控制策略理论分析的正确性和实现方案的有效性。
孤岛电网多蓄电池储能设备下垂控制SOC一致性
3 引言
在孤岛电网运行中,由于可再生能源的输出功率具有间歇性与随机性特征,其安全性与可靠性较弱[1-6]。因此,孤岛电网除含发电系统外还需配置一定容量的储能环节,以协调发电与用电之间的功率平衡,维持电网稳定运行。蓄电池因具有可靠性高、成本低、技术成熟以及能量密度大的优点,被广泛应用于储能环节[7-10],成为孤岛电网储能系统的首选。相关领域学者在蓄电池储能设备(Battery Energy StorageDevice,BESD)的容量规划[5]、配置方式[6-8]以及控制策略[9,10]等方面进行了大量研究,并取得了一些成果。
上述研究成果主要针对储能环节总体能量规划与全系统控制,目前对于储能环节内分布式并联储能设备的功率负荷平衡分配与协调控制的研究较少。为提升孤岛电网储能环节有效容量与补偿能力,将可靠性高、易于扩容、系统控制简单的无连线下垂控制策略引入孤岛电网并联储能设备的协调控制中[11-16]。
在理想放电过程中,下垂控制应可使各并联BESD中SOC时刻处于均衡状态。但下垂控制器中功率环只对有功功率低频分量加以调节,无法准确控制各储能设备输出的瞬时功率。同时,不同BESD内蓄电池特性、硬件参数以及控制器精度等不一致,也造成在放电过程中并联储能设备间出现SOC差异。由于传统下垂控制策略并未对SOC均衡问题采取措施,导致其中部分储能设备因其SOC过低而先退出工作,电网负荷功率在剩余BESD间重新平衡,引起孤岛电网频率波动。同时,若剩余的BESD受接口逆变器容量限制,无法足量地满足负荷功率平衡需求,孤岛电网只能甩掉部分负荷,以维持基本运行。因此,如能在下垂控制中引入具有改善多储能设备SOC一致性功能的控制环节,可以充分利用所配置的BESD容量,扩展功率平衡的时间和提升功率平衡的能力,对保证孤岛电网安全稳定运行具有重要意义。
为了实现各储能设备间协调控制,文献[15,16]通过储能环节多层通信进行下垂控制,实现并联储能设备间SOC均衡控制,使储能设备在放电过程中的SOC趋于一致,但这些通信组件必然降低设备整体可靠性。文献[17]采用无通信环节的下垂控制策略,实现并联蓄电池储能设备间SOC均衡控制。但该方案控制参数需在固定的负荷功率与蓄电池初始SOC误差下求取,因此在运行状态具有显著随机性与不确定性的孤岛电网中的适用性有所欠缺。
本文针对孤岛电网中采用传统下垂控制的并联BESD放电过程中SOC不均问题,提出一种多储能设备SOC一致性控制策略,并进行优化。首先,将BESD中SOC作为下垂控制器输入之一,协调控制并联BESD间SOC,在放电过程中实现动态均衡。在此基础上,提出一种纳入系统运行参数的加速因子在线优化方法,实时调节有功下垂因子指数项,在约束条件下提升了下垂控制器均衡并联BESD间SOC的能力。最后通过仿真与实验对控制策略进行了验证。
1 SOC均衡下垂控制
由若干可再生能源并网逆变器及z套分布式BESD构成的孤岛电网如图1所示。
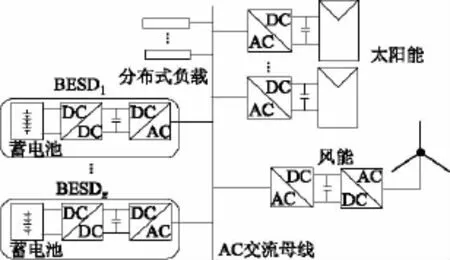
图1 孤岛电网示意图Fig.1 Diagram of an islanded microgrid
当可再生能源的发电能力大于负荷的功率需求时,孤岛电网运行频率接近于额定值,且各BESD采用电压电流双闭环控制模式对自身蓄电池充电。当可再生能源输出功率不足时,孤岛电网频率持续跌落,在触发补偿指令阈值后,BESD依据负荷需求和其SOC向电网注入能量,有效支撑孤岛电网电压与频率,直至可再生能源的功率供给能力大于负荷需求,孤岛电网频率回升,BESD退出补偿。为了保证各BESD工作的持续一致,维持其有效补偿能力,需对各BESD输出有功功率进行实时调节,以实现各BESD内SOC一致,如图2给出了多储能设备SOC一致性控制策略框图。
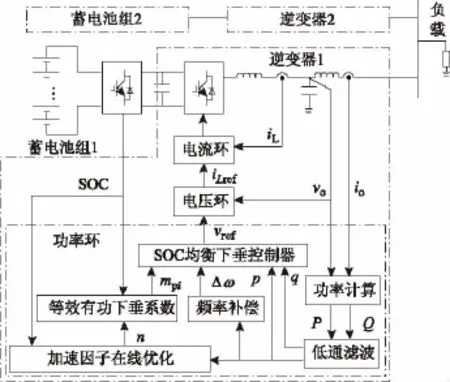
图2 多储能系统SOC一致性优化控制策略框图Fig.2 Diagram of error SOC suppressing droop controller
由图2可见,BESD经LCL滤波器接入孤岛电网,基于传统下垂控制策略[11-16],SOC均衡下垂控制策略表达式为
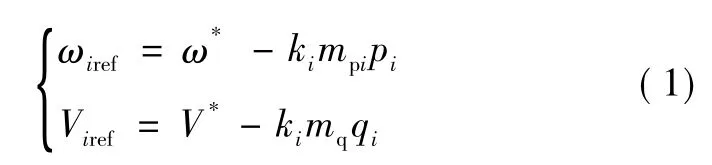
在BESD放电过程中,由下垂控制特性可得到其输出有功功率为[11-16]
式中:Pload为孤岛电网中蓄电池储能环节总负荷功率,W;Pi为BESDi输出有功功率,W。随着BESD向孤岛电网注入有功功率,其内部SOC逐渐降低,孤岛电网中BESD内SOC计算方法为
式中:SOCi_ini为BESDi放电过程初始剩余能量;SOCi为BESDi当前剩余能量;Bat为BESD中蓄电池单位容量,J;ci为BESDi储能容量系数,且ci∈(0,1]。孤岛电网中各并联BESD所配备的接口逆变器容量应与其蓄电池容量相匹配,则ki与ci间关系满足

式中C为BESD接口逆变器容量系数与储能容量系数间比例常数。
联合式(2)~式(4),BESDi内SOC变化率可表示为
为了实现并联BESD在放电过程中动态均衡SOC,应在平衡孤岛电网负荷需求的前提下,按照自身剩余能量分配负荷功率,使剩余能量较多的BESD具有较大的SOC变化率,而剩余能量较少的BESD具有较小的SOC变化率,从而使不同BESD中SOC逐渐趋于一致。本文拟采用非线性对数函数形式构建不同BESD间SOC变化率关系,则并联BESD间SOC变化率关系设计为
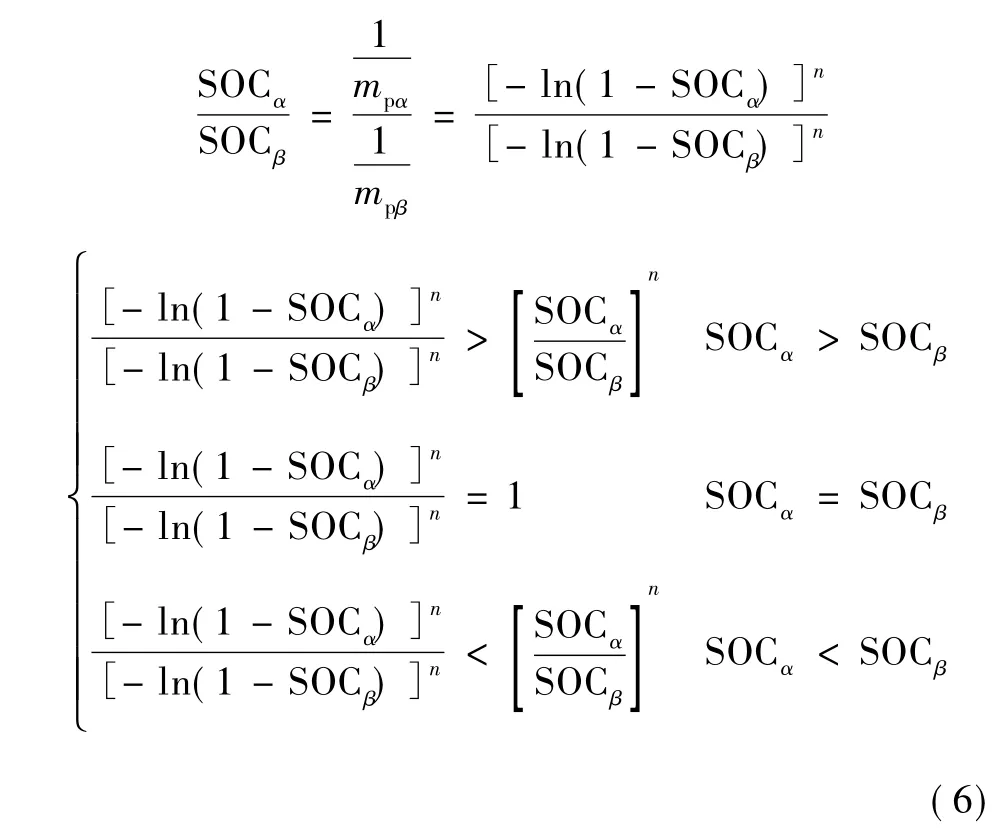
式中:α、β∈[1,z],且α≠β;n为加速因子,且n≥1。
由式(6)可见,当并联BESD间SOC未均衡时,各BESD内SOC变化率不同,且对数函数特性使并联BESD间SOC变化率比例关系大于线性比例关系,证明设计的比例关系具有更快的均衡速度。加速因子n可对这种比例关系的快速性进行调节,随着指数项加速因子n增大,并联BESD间SOC变化率比例关系也随之增大,说明不同并联BESD中SOC能够更快地趋于一致。通过对式(6)的分析,式(1)中有功下垂系数设计为

式中mP0为公共有功下垂系数,rad/s/W。
为验证采用式(7)中有功下垂系数的下垂控制器SOC均衡能力,设放电过程中两台并联BESD相互间SOC差异为

式中eSOC_αβ为并联BESD相互间SOC差异。
结合式(2)~式(5),并联BESD间eSOC_αβ的导数为

结合式(4)与式(6),当eSOC_αβ≠0,eSOC_αβ与间关系满足
由式(10)可见,在放电过程中SOC均衡下垂控制器可根据各BESD内SOC分配负荷功率,使eSOC_αβ幅值逐渐降低。将BESD中SOC作为下垂控制器输入量后,逆变电压频率给定值不再沿传统P-ω下垂曲线移动,而是沿P-SOC-ω下垂曲面移动,则SOC均衡控制策略下的孤岛电网频率偏移为
式中ω为孤岛电网电压频率,rad/s。采用泰勒级数将对数函数展开,其二阶近似表达式为

将式(12)带入式(11),则孤岛电网频率偏移可近似表示为
由式(13)对比可见,在相同运行条件下,采用对数函数比例关系构建的有功下垂系数mpi,不但具有更大的SOC变化率比例关系,同时具有较小的孤岛电网频率偏移。当n=1时,P-SOC-ω下垂曲面如图3所示。
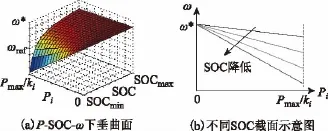
图3 P-SOC-ω下垂曲面Fig.3 P-SOC-ωdroop surface
由图3与式(13)可见,随着BESD中SOC降低,有功下垂系数mpi逐渐增大,使孤岛电网频率偏移较大,且若加速因子n取值增大,频率偏移将被进一步增加。因此,必须对式(7)中有功下垂系数mpi变化范围加以约束,其表达式为
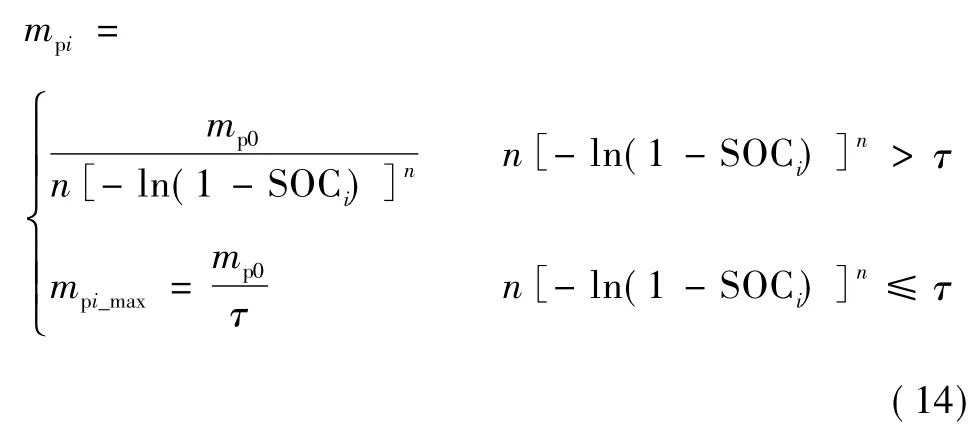
式中:τ为n[-ln(1-SOCi)]n变化范围边界值;mpi_max为有功下垂系数最大值,rad/s/W。边界值τ应使电网频率偏移小于2%,其表达式为

式中Pmax为BESD单位容量接口逆变器输出有功功率最大值,W。mpi变化范围约束示意图如图4所示。
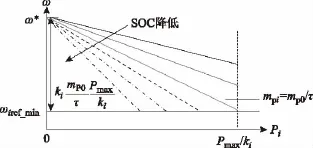
图4 mpi变化范围约束示意图Fig.4 Diagram of constraint of mpi
图4中ωiref_min为逆变器输出电压频率给定最小值;虚线为n[-ln(1-SOCi)]n≤τ时不同SOC对应的下垂曲线。受式(14)约束,随着SOC降低,下垂控制器将不再运行于虚线所示的下垂曲线,而是运行于有功下垂因子为mpi=mp0/τ的下垂曲线,且不再随SOC变化。因此,若τ取值较大,会降低下垂控制器SOC均衡能力。若τ取值较小,会使频率偏移严重,且有可能使下垂控制器失稳[18]。因此,在保证下垂控制器稳定的前提下,应选取尽可能小的τ值。
为在放电过程中实现SOC均衡,SOC较高的BESD应提供较多有功功率,但其输出功率受接口逆变器容量限制,存在无法满足下垂控制器要求的可能性。在这种情况下SOC均衡下垂控制器根据输出功率限制调整给定频率,使BESD接口逆变器可长时间工作于最大输出有功功率点,尽可能多地输出有功功率,均衡并联BESD间SOC,则式(1)中SOC均衡下垂控制器改写为
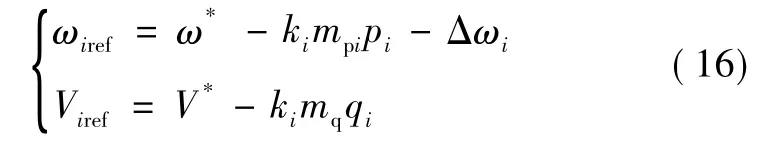
式中Δωi为频率补偿信号,rad/s,其控制框图与平移示意图如图5所示。
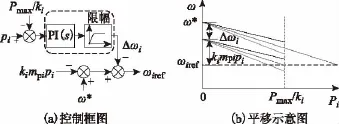
图5 BESD接口逆变器最大有功功率输出限制Fig.5 Maximum output active power limitation of inverter
图5中限幅控制器将Δωi变化范围限制为[0,mp0Pmax/τ]。当BESD输出有功功率超过接口逆变器容量设定值时,其差值通过PI控制器,并经限幅后生成Δωi,调整逆变电压频率给定,使BESD运行于最大有功功率输出点。当BESD输出有功功率退出最大值时,在积分器的作用下Δωi逐渐减小至零,实现频率补偿信号柔性退出。
由上述分析可见,通过对输出有功功率与逆变电压频率偏移加以约束,显著提升了本文所提多储能设备SOC一致性控制策略在孤岛电网中的适用性,但同时也削弱了理想条件下控制策略均衡并联BESD间SOC的能力,因此有必要结合孤岛电网运行状态分析并联BESD间SOC均衡效果。
3 加速因子在线优化
2.1固定加速因子局限性分析
实际系统中存在蓄电池充电尚未完毕就转入对孤岛电网补偿的情况,此时孤岛电网中储能环节总剩余能量较低,各BESD中SOC均处于较低值。由SOC变化范围与对数函数特性可知,随着SOC降低,mpi易于进入约束范围,使其不再随SOC变化。因此有必要结合不同初始SOC状态分析本文所提控制策略的性能,讨论进一步降低并联BESD间SOC差异的可能性。
为更为直观地对上述问题加以分析,以两台有功功率容量为20 kW的并联BESD独立支撑孤岛电网工作过程为例。为模拟不同的并联BESD总剩余能量,BESDα内蓄电池初始剩余能量SOCα_ini变化范围为0.95~0.55,BESDβ内蓄电池初始剩余能量SOCβ_ini= SOCα_ini-eSOC_ini,且eSOC_ini=0.2。以eSOC_fin表示当BESDβ因SOC过低而停止运行时,并联BESD间SOC差异的最终均衡结果。在Pload=24 kW及n=1~6条件下绘制图6。

图6 不同n值及SOCα_ini下eSOC_fin变化示意图Fig.6 Relationship between n,SOCα_iniand eSOC_fin
由图6a可见,随着并联BESD初始SOC降低,eSOC_fin逐渐上升。由图6b与图6c可见,当各并联BESD内初始SOC均较高时,较大的加速因子n有利于降低eSOC_fin。与之相反,当各并联BESD内初始SOC均较低时,较小的加速因子n有利于降低eSOC_fin。对比图6b与图6c可见,图6c中eSOC_fin明显偏高。这是由于当各并联BESD均处于低初始SOC条件下时,虽然较大的加速因子n可加大负荷功率在并联BESD中的分配比例,但BESD输出的有功功率受接口逆变器容量限制,无法实现理想的SOC均衡效果。同时,随着加速因子n增大,则mpi将更早进入变化范围约束内,使各BESD均长时间运行于mpi=mp0/τ下,进一步降低了SOC均衡效果。
由上述分析可知,在不同并联BESD总剩余能量下,若下垂控制器中加速因子n始终工作于固定数值,对抑制并联BESD间SOC差异具有局限性。因此,加速因子n能够根据各并联BESD中SOC动态变化,改善约束条件下SOC均衡效果。
2.2在线优化加速因子设计
由前文可知,在约束条件下,随着各并联BESD中总剩余能量下降,较大的加速因子n不利于并联BESD间SOC均衡。因此,应使加速因子n随总剩余能量降低而减小,从而推迟有功下垂系数mpi进入约束的时间,改善SOC均衡效果。但下垂控制为无通信并联控制策略,各BESD无法获得其余储能设备内的信息,故本文采用接口逆变器运行参数对加速因子n进行在线优化。
当孤岛电网中各并联BESD接口逆变器均未运行于最大输出有功功率限制时,BESDi输出的有功功率为
式(17)中Pi与ni[-ln(1-SOCi)]ni均为BESDi接口逆变器运行参数,在BESD接口逆变器第k次控制周期内可构建变量γi(k)。为了避免Pi中高频分量对控制方案造成扰动,方程采用有功功率低频分量,则γi(k)表示为
由式(18)可见,由单一BESD接口逆变器运行参数构建的变量γi可在无通信条件下近似反映孤岛电网中并联BESD总负荷功率与并联BESD内总剩余能量间的关系。在相同负荷功率条件下,随着各并联BESD内总剩余能量降低,γi随之增大,反之减小。可见γi具有与eSOC_fin相同的特性。因此,各并联BESDi可依据变量γi独立调节在线优化加速因子ni,使ni随并联BESD内总剩余容量下降而减小,不再工作于固定值。
结合运行约束条件,由式(18)可得到变量γi的最大值为
式中Pload_max为蓄电池储能环节最大负荷功率,W。
基于式(17)~式(19)可设计加速因子ni根据孤岛电网运行状态在一固定区间内变化,且与并联BESD内总剩余容量呈正比例关系。因此各BESDi由第k次控制周期内得到的逆变器运行参数,可构建加速因子ni(k)在线优化函数为
式中nmax为加速因子ni上限值。
式(20)中得到的ni(k)使BESD具有随孤岛电网储能环节总剩余容量下降、加速因子ni逐渐减小的特征。
需要指出的是,当BESDi工作于Pi=Pmax/ki时,其输出有功功率无法满足理想条件下SOC均衡下垂控制器要求,其γi表示为
式中γi_Pmax为BESDi工作于Pi=Pmax/ki下的γi。
对比式(18)与式(21)可知,运行于最大有功功率输出限制下的BESDi具有较大的ni,但由于其有功功率已无法增大,SOC均衡能力已达极限。因此,虽然与其他BESD具有不同数值的加速因子ni,也可有效降低并联BESD间SOC差异。随着SOC逐渐下降,BESD退出最大输出有功功率限制后将满足式(18)所示函数关系,从而与其他未运行于最大输出有功功率限制下的BESD具有相同数值的ni,且一同变化。
为验证基于式(20)的在线优化加速因子ni对eSOC_fin的改善效果,使用与图6相同参数绘制图7。

图7 在线优化加速因子n下eSOC_fin变化示意图Fig.7 eSOC_finunder online adaptive accelerating factor n
由图7可见,SOC均衡下垂控制器采用在线优化加速因子n后,eSOC_fin随初始SOC降低而升高,但与固定加速因子n相比较,其eSOC_fin幅值已被显著降低。
综合上述分析可知,基于式(20)的在线优化加速因子ni使并联BESD不再运行于固定的加速因子n下,而是由各BESDi依据自身运行状态独立调节加速因子ni,显著改善了本文所提多储能设备SOC一致性控制策略在约束条件下均衡并联BESD间SOC的性能。
3 仿真验证
为验证所设计孤岛电网用多储能设备SOC一致性优化策略的有效性,采用MATLAB/Simulink搭建系统仿真模型。其中BESDα接口逆变器有功功率容量为10 kW(kα=1),BESDβ接口逆变器有功功率容量为20 kW(kβ=0.5),负荷有功功率17 kW,其余参数如表1所示。

表3 下垂控制器参数表Tab.1 Parameters of droop controller
为了对比证明多储能装置不同剩余能量下固定加速因子n对SOC均衡的局限性以及验证本文所提在线优化加速因子n控制算法对并联BESD间SOC差异的均衡能力,并联BESD分别在高初始SOC与低初始SOC条件下进行仿真。
算例1:高SOC初始值:SOCα_ini=0.85,SOCβ_ini=0.65
图8a与图8b分别为固定加速因子n下并联BESD输出有功功率波形与SOC波形。在放电过程初始阶段,由于使用SOC均衡下垂控制策略,接口逆变器容量较小的BESDα输出较多有功功率。但Pα受接口逆变器容量限制,无法满足mpi间比例关系,因此工作于Pα=10 kW。随着SOC下降,并联BESD按照mpi比例关系分配功率,Pβ逐渐上升并超过Pα。随着并联BESD输出有功功率,其SOC逐渐趋于一致。当mpi进入变化范围约束后,并联BESD按照接口逆变器容量比例(1∶2)分配负荷功率,无法使SOC差异继续降低。对比eSOC_fin可见,固定加速因子n=5时具有更好的SOC均衡效果。
图8c与图8d分别为采用在线优化加速因子n的并联BESD工作过程仿真。由图8d可见,并联BESD的在线优化加速因子首先工作在ni=6,随着SOC降低,加速因子ni共同逐渐减小,使并联BESD在低SOC条件下继续降低差异。与图8a和图8b对比可见,在线优化加速因子n具有更好的SOC均衡效果,其eSOC_fin≈0。
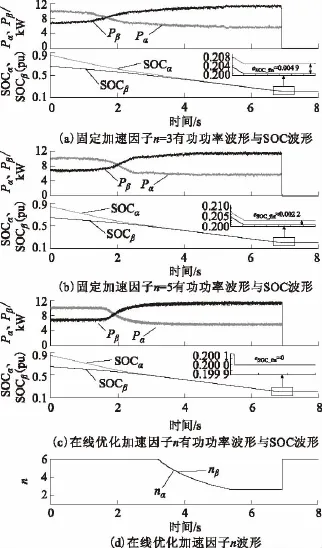
图8 高初始SOC下对比仿真Fig.8 Simulation results under high SOC initial value
算例2:低SOC初始值:SOCα_ini=0.65,SOCβ_ini=0.45
图9a与图9b分别为固定加速因子n下并联BESD输出有功功率波形与SOC波形。低SOC初始值下并联BESD工作过程与图8类似,但由于初始SOC较低,在较大加速因子n下,mpi将更早进入变化范围约束,使并联BESD工作于传统下垂控制策略下,按照接口逆变器容量比例(1∶2)分配负荷功率。因此,对比图9a与图9b可见,固定加速因子n=3时可获得更好的SOC均衡效果。
图9c与图9d分别为采用在线优化加速因子n的并联BESD工作过程仿真。在并联BESD放电初始阶段,Pα工作于接口逆变器最大有功功率输出点,且由于初始SOC较低,nβ持续下降以避免工作于mpβ变化范围约束内,使nα>nβ。随着BESDα中SOC逐渐降低,Pα不再运行于接口逆变器输出有功功率最大值,nα也随之减小。由于式(18)中采用有功功率低频分量构建γi,因此nα经一段时间调节后逐渐与nβ重合,并最终一同下降,进一步推迟有功下垂系数进入变化范围约束的时间,使并联BESD间SOC差异持续减小。图9c中eSOC_fin≈0.001 8,优于图9a与图9b的结果。

图9 低初始SOC下对比仿真Fig.9 Simulation results under low SOC initial value
由上述对比仿真结果可见:①本文所提SOC均衡下垂控制策略能够在放电过程中有效降低并联BESD间SOC差异;②高初始SOC条件下,较大的加速因子有利于降低SOC差异;低初始SOC条件下,较小的加速因子有利于降低SOC差异。因此,加速因子n选取为固定值对均衡SOC具有局限性;③在线优化加速因子n可根据孤岛电网运行状态实时变化,在无通信条件下改善SOC均衡效果。
3 实验验证
在实验室搭建两台接口逆变器有功功率容量分别为10 kW与20 kW的并联BESD系统验证所提控制策略。实验电路采样及控制芯片采用TI公司TMS320F28335,逆变器采用LCL滤波器,负荷有功功率为17 kW。实验相关电路参数为:直流母线电压700 V,逆变器侧电感3 mH,网侧电感1 mH,滤波电容20 F。下垂控制器参数如表1所示。
图10为并联BESD初始SOC分别为0.85与0.65,固定加速因子n=3、n=5及在线优化加速因子n下有功功率输出波形及SOC变化曲线波形。在高初始SOC条件下,并联BESD中SOC在放电过程中逐渐趋于一致,且随着固定加速因子n增大,Pα能长时间工作于接口逆变器容量限制值,使并联BESD间eSOC_αβ下降速度显著加快。当其中一台BESD退出工作时,eSOC_αβ终值接近于零。采用在线优化加速因子n后,在放电初始阶段,eSOC_αβ以较大速度下降,且与图10d和图10e对比可见,图10 f中SOCα与SOCβ接近重合的时间更早,使eSOC_αβ终值更接近于零。
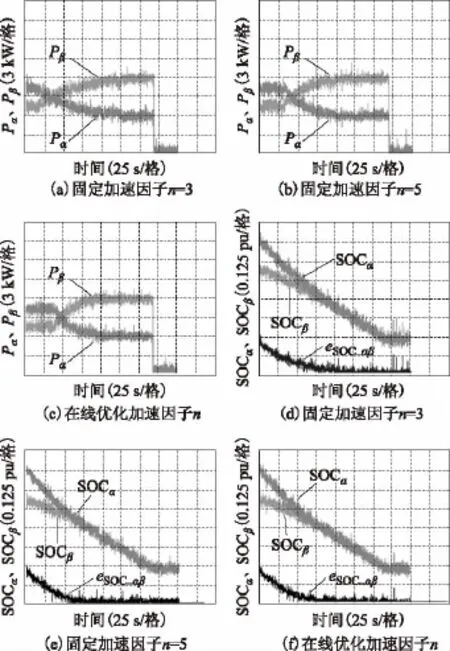
图10 高初始SOC下输出有功功率及SOC波形Fig.10 Experiment results of SOC and output active power under high SOC initial value
图11为并联BESD初始SOC分别为0.65与0.45,固定加速因子n=3、n=5及在线优化加速因子n下有功功率输出波形及SOC变化曲线波形。由图11可见,在低初始SOC条件下,随着固定加速因子n增大,式(14)所示有功下垂因子mpi变化范围约束越早介入SOC均衡下垂控制器,使并联BESD按照接口逆变器容量比例输出有功功率,SOC以相同斜率下降。因此,当n=3时可获得较小的eSOC_αβ终值。采用在线优化加速因子n后,并联BESD依据逆变器运行参数在线计算加速因子ni,推迟mpi变化范围约束介入时间。与图11d和图11e对比可见,图11f中eSOC_αβ终值较低。
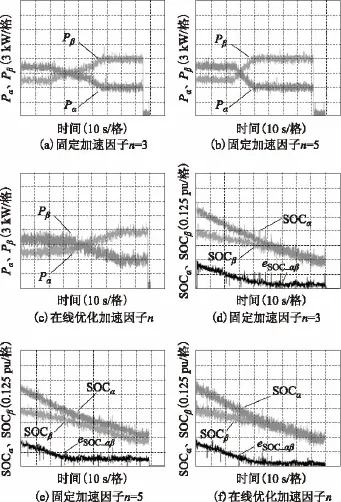
图11 低初始SOC下输出有功功率及SOC波形Fig.11 Experiment results of SOC and output active power under low SOC initial value
3 结论
为了进一步提升并联BESD的补偿能力,本文提出一种基于蓄电池能量存储设备中SOC构建的多储能设备SOC一致性优化控制策略,使并联BESD在满足孤岛电网负荷需求的前提下,实现并联BESD间SOC动态均衡;在结合下垂控制器约束及逆变器运行参数分析的基础上,提出一种实时在线优化加速因子n的控制方案,进一步改善本文所提下垂控制器在约束条件下SOC均衡效果。仿真与实验结果验证了本文所提控制算法能够有效降低并联BESD间SOC差异,显著提升剩余能量均衡度。
[1]Guerrero J M,Vicuna L G,Matas J,et al.Steadystate invariant frequency and amplitude droop control using adaptive output impedance for parallel connected UPS inverters[C].IEEE Annual Applied Power Elecrtonics Conference and Exposition,Austin,2005.
[2]Xu Zhuang,Li Rui,Zhu Hui,et al.Control of parallel multiple converters for direct drive permanent magnet wind power generation systems[J].IEEE Transactions on Power Electronics,2012,27(3):1259-1270.
[3]Wang Xianwei,Zhou Fang,Li Jing,et al.Modeling and control of dual-stage high-power multifunctional PV system in d-q-0 coordinate[J].IEEE Transactions on Industrial Electronics,2013,60(4):1556-1570.
[4]Yasser A I M,Ehab F E S.Adaptive decentralized droop controller to preserve power sharing stability of paralleled inverters in distributed generation microgrid[J].IEEE Transactions on Power Electronics,2008,23(6):2806-2815.
[5]Lee C T,Jiang R P,Cheng P T.A grid synchronization method for droop controlled distributed energy resource converter[J].IEEE Transactions on Industrial Application,2013,49(2):954-962.
[6]Josep M,Mukul C,Tzung-Lin L,et al.Adanced control architectures for intelligent microgrid-partⅡ:power quality,energy storage,and AC/DC microgrid[J].IEEE Transactions on Industrial Electronics,2013,60(4):1263-1270.
[7]王成山,武震,李鹏.微电网关键技术研究[J].电工技术学报,2014,29(2):1-12.
Wang Chengshan,Wu Zhen,LiPeng.Research on key technologies of microgrid[J].Transactions of China Electrotechnical Society,2014,29(2):1-12.
[8]戚永志,刘玉田.风光储联合系统输出功率滚动优化与实时控制[J].电工技术学报,2014,29(8):265-273.
Qi Yongzhi,Liu Yutian.Output power rolling optimization and real-time control in wind-photovoltaic-storage hybrid system[J].Transactions of China Electrotechnical Society,2014,29(8):265-273.
[9]别朝红,李更丰,谢海鹏.计及负荷与储能装置协调优化的微网可靠性评估[J].电工技术学报,2014,29(2):64-73.
Bie Chaohong,Li Gengfeng,Xie Haipeng.Reliability evaluation ofmicrogrids considering coordinative optimization of loads and storage device[J].Transactions of China Electrotechnical Society,2014,29(2):64-73.
[10]Jayasinghe SD G,Vilathgamuwa D M,Madawala U K. A dual inverter based supercapacitor direct integration scheme for wind energy conversion systems[J].IEEE Transactions on Industry Applications,2013,49(3):1023-1030.
[11]Maharjan L,Yamagishi T,Akagi H.Active-power control of individual converter cells for a battery energy storage system based on a multilevel cascade PWM converter[J].IEEE Transactions on Power Elecrtonics,2012,27(3):1099-1107.
[12]Brekken T K,Yokochi A,Jouanne A V,et al. Optimal energy storage sizing and control for wind power applications[J].IEEE Transaction on Sustainable Energy,2011,2(1):69-77.
[13]Vivek A,Kasemsak U,Raymond A D,et al. Development and validation of a battery model useful for discharging and charging power control and lifetime estimation[J].IEEE Transactions on Energy Conversion,2010,25(3):821-832.
[14]彭思敏,窦真兰,凌志斌,等.并联型储能系统孤网运行协调控制策略[J].电工技术学报,2013,28(5):128-134.
Peng Simin,Dou Zhenlan,Ling Zhibin,et al. Cooperative control for parallel-connected battery energy storage system of islanded power system[J].Transactions of China Electrotechnical Society,2013,28(5):128-134.
[15]陆晓楠,孙凯,黄立培,等.直流微电网储能系统中带有直流母线电压跌落补偿功能的负荷功率动态分配方法[J].中国电机工程学报,2013,33(16):37-46.
Lu Xiaonan,Sun Kai,Huang Lipei,et al.Dynamic load power sharingmethod with elimination of bus voltage deviation for energy storage systems in DC micro-grid[J].Proceedings of the CSEE,2013,33(16):37-46.
[16]Kakigana H,Miura Y,Ise T.Distribution voltage control for dc microgrids using fuzzy control and gain scheduling technique[J].IEEE Transactions on Power Electronics,2013,28(5):2246-2258.
[17]Lu X N,Sun K,Guerrero JM,et al.State-of-charge balance using adaptive droop control for distributed energy storage systems in DCmicrogrid applications[J]. IEEE Transactions on Industrial Electronics,2014,61(6):2804-2815.
[18]Mohamed Y A,EI-Saadany E F.Adaptive decentralized droop controller to preserve power sharing stability of paralleled inverters in distributed generation microgrid[J].IEEE Transactions on Power Electronics,2008,23(6):2806-2817.
Optimal State-of-charge Balancing Control for Paralleled Battery Energy Storage Devices in Islanded M icrogrid
Wang Weixin1Duan Jiandong1Zhang Runsong2Guo Haifeng1Sun Li1
(1.School of Electrical Engineering&Automation Harbin Institute of Technology Harbin 150001 China 2.Equipment Manufacturing Company China National Petroleum Corporation Beijing 100007 China)
The droop controlled battery energy storage device(BESD)becomes more and more commonplace tomaintain the stability of the islanded power system.In discharging process,the state-of-charge(SOC)error between different BESDs could force some BESDs to cease operation earlier than expectation,which eliminates the system stability.An optimal SOC balancing control for parallel BESDs in islanded microgrid is proposed in this paper to effectively suppress the SOC error.The SOC of the battery is employed in the droop controller to adjust the output active power of BESD in real-time,and thus decline the SOC error among parallel BESDs.In addition,to achieve better performance of SOC balancing under the constraints of inverter'smaximum output power and islanded microgrid's deviation frequency,the accelerating factor is optimized online based on the state of operation in order to diminish the final difference among SOCs.The effectiveness of the control scheme is validated by simulation and experiment results.
Islanded microgrid,battery energy storage device,droop control,SOC balancing
TM315
王炜信男,1986年生,博士研究生,研究方向分布式储能和逆变器并联控制。
段建东男,1985年生,博士,讲师,研究方向为功率变换器和分布式发电系统。
中国石油科技创新基金(2013D-5006-0310)资助项目。
2015-01-12改稿日期2015-08-25
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
能源工程(2020年6期)2021-01-26 00:55:22
新世纪智能(语文备考)(2020年9期)2020-12-31 09:24:02
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
新高考(英语进阶)(2018年1期)2018-04-18 13:59:51
创新作文(小学版)(2017年33期)2017-04-04 02:02:14
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年1期)2016-04-16 04:57:26