
舰船规避对追踪段鱼雷弹道散布规律的影响
2015-10-25 05:51:50卢孟维魏继锋王树山
水下无人系统学报 2015年5期
卢孟维, 马 峰, 魏继锋, 王树山
(北京理工大学 爆炸科学与技术国家重点实验室, 北京, 100081)
舰船规避对追踪段鱼雷弹道散布规律的影响
卢孟维,马峰,魏继锋,王树山
(北京理工大学 爆炸科学与技术国家重点实验室, 北京, 100081)
机动规避是水面舰船对鱼雷防御的基础和前提, 文中通过对处于自导追踪段的声自导鱼雷战场态势的分析, 建立了水面舰船与声自导鱼雷规避对抗的数学模型, 选取水面舰船将大舷角来袭鱼雷置于舰尾高速脱离的规避策略, 分析了在舰船规避影响下的鱼雷攻击弹道散布特性, 最后分别针对不同硬杀伤反鱼雷武器提出了决策依据, 其结果可为提高水面舰船的生存能力及反鱼雷作战决策提供参考。
舰船规避; 鱼雷防御; 弹道散布
0 引言
如何实行舰船规避以及如何进行鱼雷拦截是舰船反鱼雷作战的核心论题。从规避方式到拦截措施, 需要进行诸多的技术研究和系统分析[1-3]。
面对来袭鱼雷, 任何对抗方式都是以鱼雷预警距离和方位为决策依据。目前对鱼雷的定位方法主要是利用声呐进行, 该方法仅能给出方位变化信息, 距离信息则误差较大, 制约了舰船对鱼雷的对抗成功率[4]。同时, 水面舰船在根据声呐作出规避反应的同时也在改变着鱼雷轨迹。改变运动轨迹, 可降低声呐探测误差所带来的鱼雷位置不确定性, 若配合硬杀伤武器, 还可提高对鱼雷的毁伤概率[5]。
文中针对水面舰船反声自导鱼雷技术研究,通过分析导引律特点、规避方式, 探讨并论证机动规避与硬杀伤拦截结合的可行性及有效性, 并提出该类反鱼雷技术的作战运用方法。
1 自导追踪段鱼雷的对抗方式分析
声自导鱼雷的导引方式主要有尾追法、固定提前角法、平行接近法和比例接近法[6]。无论鱼雷采用何种导引方式, 可以确定的是鱼雷航速都要大于水面舰船航速。一旦水面舰船被鱼雷捕获,无论水面舰船采取何种规避方式, 只要不能摆脱鱼雷的声呐跟踪, 也就无法改变鱼雷沿着雷-舰方位不断逼近的事实, 这就很难通过纯机动规避方式走出鱼雷的自导探测范围[7]。
文献[8]对水面舰船的纯规避策略进行了系统阐述, 指出: 水面舰船通过纯机动规避能否摆脱敌鱼雷声呐跟踪具有很大的不确定性; 然而,通过迅速背敌转向, 将鱼雷方位置于舰尾180°舷角高速脱离却可达到另一个确定性的战术意图,即最大程度地消耗鱼雷航程, 延缓被鱼雷捕获的时间, 进而为软硬对抗的实施争取时间。
将鱼雷置于舰尾这种规避方式, 还可发挥水面舰船舰尾反射强度弱、辐射噪声小的优势, 如图1所示。这将降低舰船被鱼雷声呐捕获的概率,提高走出声呐探测范围的可能性。因此从声学角度考虑, 这种规避策略是可行的。文中选取180°背敌转向规避方式和保持直航状态两种情况进行仿真计算和对比分析。
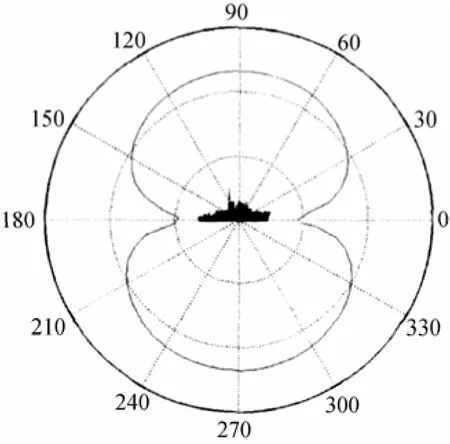
图1 舰船噪声分布示意图Fig. 1 Schematic of vessel radiated noise distribution
2 导引弹道数学模型
2.1对抗模式
初始时刻舰船位于A点, 航向为X轴正方向,航速为V0; 接受预警时, 鱼雷位于T点, θ为预警舷角; 预警后, 舰船迅速180°背敌转向进入规避航向, 并向预估的鱼雷航迹上布置软硬对抗武器,对来袭鱼雷进行拦截。
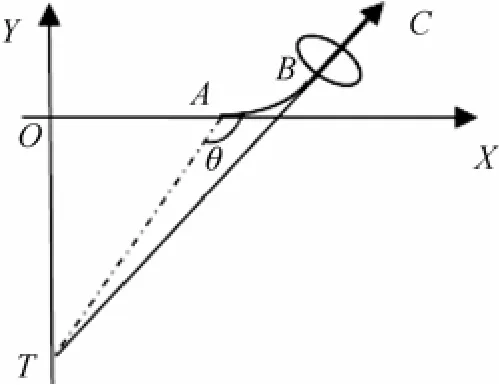
图2 舰船规避态势Fig. 2 Situation of vessel evasion
2.2弹道仿真数学建模
根据上述雷-舰对抗状态, 构建出鱼雷在水平面追踪目标的弹道数学模型, 不考虑鱼雷的横滚和俯仰运动[9]。鱼雷的水平运动在地面坐标系内, 鱼雷发现目标后采用固定提前角(提前角为零时即尾追法)导引方式, 弹道仿真系统结构框图如图3所示。

图3 弹道仿真数学模型框图Fig. 3 Block diagram of trajectory simulation model
选取某型鱼雷, 其侧向运动动力学数学模型为

式中: β, ωv, δr, θ, φ, Vm, Xe, Ze分别为鱼雷的侧滑角、回旋角速度、直舵角、航向角、弹道偏角、速度, 以及地面坐标系中的X轴和Z轴坐标。
舰船的运动学模型可简化为

式中: θT, ωT, XT, ZT分别为目标弹道偏角、回旋角速度、纵向距离和侧向距离。
鱼雷与目标的相对距离为

鱼雷尾追法的操舵规律为

式中, η为雷体系中的提前角。
测量噪声δu为鱼雷自导头的角度测量噪声,在仿真中设定δu为零均值, 方差0.5°的正态随机噪声。
3 仿真结果及分析
依据构建的数学模型, 在Matlab/Simulink中建立鱼雷弹道系统仿真框图。设置目标、鱼雷和鱼雷导引规律的模块参数值, 选择变步长解法器为ode45, 最小步长自动调整, 最大步长为0.05 s,进行仿真计算。
假定水面舰船预警距离为2 500 m, 舰船航速为30 kn, 鱼雷航速为60 kn, 由于声呐探测存在一定误差, 仿真过程中取报警舷角标准差为2°的正态随机分布, 预警距离标准差为200 m的正态随机分布。鱼雷采用尾追法导引弹道, 分别对180°背敌转向和保持直航状态2种规避方式, 通过设定不同的报警舷角来运行仿真程序。
3.1不同报警舷角下舰船规避鱼雷弹道情况
当报警舷角小于90°时, 鱼雷轨迹受鱼雷位置、鱼雷提前角设定以及舰船和鱼雷航速影响,规避方式的选择要综合考虑以上因素, 尤其是鱼雷导引提前角的值是舰船无法得到的, 舰船无法仅基于报警舷角和预警距离选择规避方式, 故不在文中列举讨论。
设定预警舷角为100°~170°, 间隔为10°, 依此进行仿真计算。
图4给出了鱼雷报警舷角为120°时的弹道仿真结果, 可以看出, 舰船采用180°背敌转向的规避方式时, 鱼雷弹道随着与舰船距离的缩短收敛明显; 在保持直航状态时, 鱼雷弹道收敛较慢。
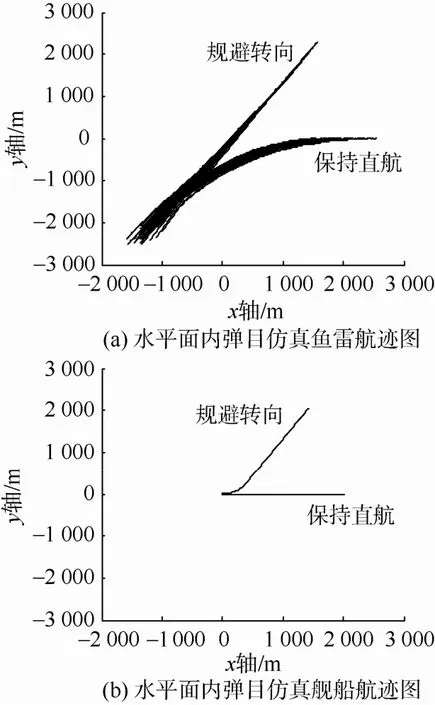
图4 120°预警舷角时不同规避方式下鱼雷弹道散布Fig. 4 Curves of torpedo trajectory dispersion under different evasion modes when alarming board angle is 120°

图5 背敌转向时鱼雷弹道散布特性Fig. 5 Characteristics of torpedo trajectory dispersion when a vessel turns back to a torpedo
针对鱼雷弹道的收敛速度, 在直角坐标系下对不同时刻鱼雷的散布范围进行计算, 可以看出,当舰船进行背敌转向规避时, 鱼雷可能位置范围会随着雷-舰距离的缩短逐渐减小, 其弹道散布特性如图5所示。将仿真终点设为2 500步, 此时鱼雷位置均值为(500, 512), 雷-舰距离约为1 200 m, Xe的标准差为109 m, Ze的标准差为167 m, 同时2个坐标方向的位置方差均在航程前半段快速收敛。
当采用直航方式时, 其弹道散布特性如图6所示。将仿真终点设为2 500步, 鱼雷终点位置均值为(1 100, –205), 雷舰距离约为1 000 m, Xe的标准差为161 m, 并呈发散状态, 值得注意的是Xe在航行过程中存在极值点, Ze的标准差为94 m, 且只在航程后半段才快速收敛。
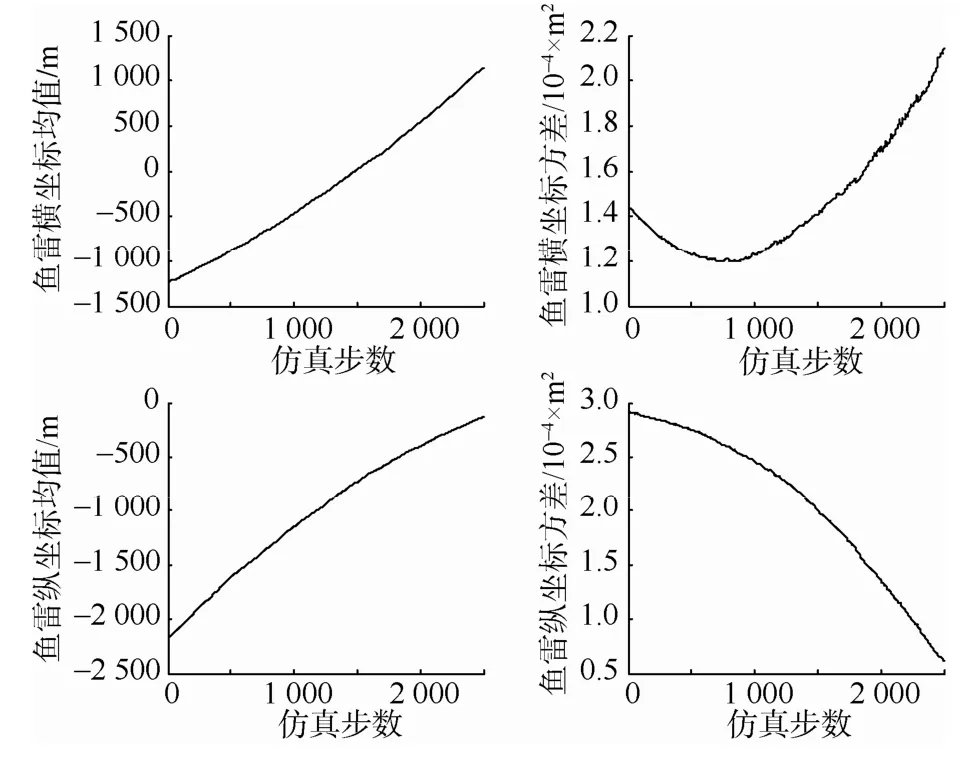
图6 保持直航时鱼雷弹道散布特性Fig. 6 Characteristics of torpedo trajectory dispersion when a vessel keeps direct route
通过弹道计算可以看出, 在2种方式舰船机动过程中, 随着雷-舰距离的缩短, 鱼雷的散布误差均有不同程度的收敛, 不同的是, 在背敌转向方式下航迹末段, 鱼雷位置横纵坐标的方差均不断收敛, 并趋于稳定, 可认为鱼雷的可能散布范围在弹道末段存在最小值; 在保持直航状态下,在航迹中段鱼雷位置横坐标方差存在最小值, 之后不断发散。由此可见规避方式的不同影响着鱼雷弹道收敛趋势的不同。
3.2鱼雷拦截宽度及预估命中时间计算
上节中, 对鱼雷弹道散布特性的分析是以时间为基准进行的, 但并未直观反映出鱼雷弹道在空间中的散布特性。
在舰船采用反鱼雷悬浮式深弹的对抗模式下,通常选取垂直于雷舰间连线的深弹拦截线L0作为有效拦截面。在不同报警舷角下, 文中统一选取能够覆盖3.1节中所有鱼雷弹道的有效拦截面作为鱼雷拦截宽度如图7所示, 并将鱼雷平均命中时间的一半所对应的鱼雷位置作为弹道中段。
计算出不同舷角下弹道中段拦截宽度和平均命中时间, 如图8和图9所示。当报警舷角大于90°、规避方式为180°背敌转向时, 其弹道中段拦截宽度比直航状态有明显减小,弹道中段的拦截宽度在70~100 m间。同时, 随着舰船报警舷角的增大, 舰船通过背敌转向规避方式来增大鱼雷命中时间的效果也随之减小, 可以看出盲目的转向规避并不能有效延长鱼雷命中时间。舰船应根据报警舷角的大小, 做出不同的机动规避策略。
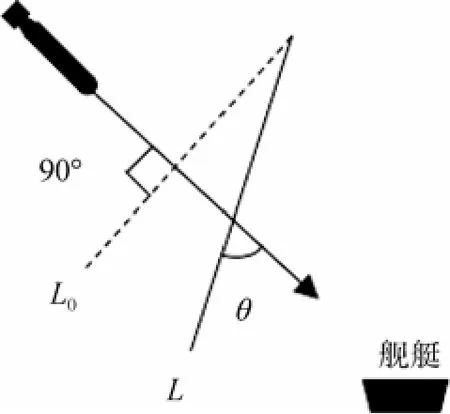
图7 鱼雷进入拦截区域示意图Fig. 7 Schematic of torpedo entering into intercept area
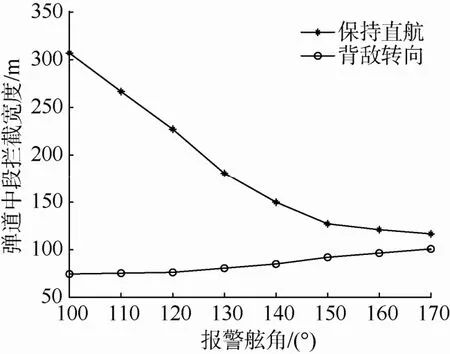

图9 不同舷角下鱼雷平均命中时间Fig. 9 Average hitting time of a torpedo with different board angle
4 结论
水面舰船在实际对抗过程中, 以文中计算结果为基础, 结合舰船反鱼雷武器的实际状况可以得到如下结论。
1) 针对报警舷角大于90°的来袭声自导鱼雷应选择180°背敌转向的规避策略, 在规避过程中可以获得更多时间来进行“软硬”杀伤对抗。
当舰船使用火箭深弹反鱼雷武器时可以参考不同时刻下鱼雷弹道散布特性, 综合分布范围和雷-舰距离两方面因素进行射击拦截; 当采用悬浮式反鱼雷深弹时, 要依照鱼雷弹道空间散布特性进行布置, 在深弹装药量一定时, 因拦截宽度的减小, 可以增大深弹阵的分布密度, 从而提高深弹阵的拦截成功率。为反鱼雷作战决策带来了可预见性, 使得反应时间有所缩短。
2) 当来袭鱼雷报警舷角小于90°时, 不应盲目调转舰船航向, 不恰当的转向规避方式会增加舰船的声呐反射强度, 同时还可能加速减小雷-舰距离, 降低舰船的生存概率。
声自导鱼雷防御技术涉及的影响因素较多,单纯运用仿真手段难以全面深入的描述。文中综合分析了鱼雷导引规律、战场态势变化等影响因素, 结合水面舰船应将声自导鱼雷置于舰尾180°进行背敌转向的规避方式, 借助仿真计算, 揭示了鱼雷弹道的变化规律, 并论证了这一机动规避策略结合软硬杀伤武器对抗的可行性, 对于提高水面舰船的生存能力具有参考价值。
[1] 肖昌美, 李恒, 彭佩. 国外水面舰艇鱼雷防御系统发展现状及趋势[J]. 鱼雷技术, 2014, 22(2): 150-156.
Xiao Chang-mei, Li Heng, Peng Pei. Development of Torpedo Defence Systems of Foreign Surface Ships[J]. Torpedo Technology, 2014, 22(2): 150-156.
[2] 陈颜辉, 李海英. 两种悬浮深弹拦截尾流自导鱼雷的应用[J]. 舰船科学技术, 2011, 33(1): 85-94.
Chen Yan-hui, Li Hai-ying. Research on Applying Two Types of Poised Depth Charge to Intercept Wake Homing Torpedo[J]. Ship Science and Technology, 2011, 33(1): 85-94.
[3] 潘新祥, 陈颜辉, 洪浩. 水面舰艇规避线导鱼雷策略[J].舰船科学技术, 2011, 33(11): 100-103.
Pan Xin-xiang, Chen Yan-hui, Hong Hao. Strategy Research on Surface Ship Eluding Wire-guided Torpedo[J]. Ship Science and Technology, 2011, 33(11): 100-103.
[4] 贾跃, 宋保维, 赵向涛, 等. 水面舰船对声自导鱼雷防御机动方法研究[J]. 火力与指挥控制, 2009, 34(1): 45-48.
Jia Yue, Song Bao-wei, Zhao Xiang-tao, et al. A Study on Vessel Evading Method to Acoustic Homing Torpedo[J]. Fire Control and Command Control, 2009, 34(1): 45-48.
[5] 钱东, 张少悟. 鱼雷防御技术的发展与展望[J]. 鱼雷技术, 2005, 13(2): 1-6.
Qian Dong, Zhang Shao-wu. History and Developmental Trend of Torpedo Defense Technologies[J]. Torpedo Technology, 2005, 13(2): 1-6.
[6] 张洪刚, 王鹏, 张静远. 机动规避条件下尾流自导鱼雷射击瞄点选取方法[J]. 鱼雷技术, 2015, 23(2): 145-149, 156.
Zhang Hong-gang, Wang Peng, Zhang Jing-yuan. An Aiming Point Selection Method for Wake Homing Torpedo Against Elusive Maneuver[J]. Torpedo Technology, 2015, 23(2): 145-149, 156.
[7] 陈春玉. 反鱼雷技术[M]. 北京: 国防工业出版社, 2006.
[8] 陈颜辉, 谷秀明. 水面舰艇纯机动规避线导鱼雷航向研究[J]. 指挥控制与仿真, 2013, 35(1): 38-41.
Chen Yan-hui, Gu Xiu-ming. Research on Eluding Course for Surface Ship Against Wire-guided Torpedo[J]. Command Control & Simulation, 2013, 35(1): 38-41.
[9] 李文哲, 张宇文, 范辉, 等. 基于matlab的鱼雷水下弹道仿真[J]. 计算机仿真, 2008, 25(12): 35-37.
Li Wen-zhe, Zhang Yu-wen, Fan Hui, et al. Torpedo Underwater Trajectory Simulation Based on MATLAB[J]. Computer Simulation, 2008, 25(12): 35-37.
(责任编辑: 许妍)
Influence of Vessel Evasion on the Dispersion Law of Torpedo Trajectory in Tracking Section
LU Meng-wei,MA Feng,WEI Ji-feng,WANG Shu-shan
(State Key Laboratory of Explosion Science and Technology, Beijing Institute of Technology, Beijing 100081, China)
Evasive maneuver is the foundation and prerequisite of a vessel defense against a torpedo. By analyzing the battlefield situation in homing tracking section of an acoustic homing torpedo, this paper establishes a mathematical model of a vessel defending against an acoustic homing torpedo, and selects the evasion strategies for a vessel rapidly running away from the large board angle incoming torpedo by placing in the stern direction, then analyzes the dispersion characteristics of torpedo attack trajectory in the influence of vessel evasion. Moreover, this paper provides a decision-making basis according to different anti-torpedo hard killing weapons. This study may provide a reference for improving the survival ability of a vessel and for decision making in anti-torpedo operation.
vessel evasion; torpedo defense; trajectory dispersion
TJ630.1
A
1673-1948(2015)05-0379-05
10.11993/j.issn.1673-1948.2015.05.011
2015-07-25;
2015-08-13.
卢孟维(1992-), 男, 在读硕士, 研究方向为水下航行器总体技术.
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
小哥白尼(趣味科学)(2022年3期)2022-06-09 03:22:48
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
智能计算机与应用(2021年5期)2021-10-05 12:45:18
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
电子制作(2019年7期)2019-04-25 13:17:48
军事运筹与系统工程(2017年1期)2017-07-31 18:19:00
计算机测量与控制(2017年6期)2017-07-01 16:23:53
制导与引信(2016年3期)2016-03-20 16:02:02
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
