
船舶车钟操纵主机模拟装置的研制
2015-10-24 03:50:04张少明梁达成潘龙江
船电技术 2015年10期
张少明,梁达成,潘龙江
(1.广东交通职业技术学院,广州510800,2.广东高校船舶自动化集成技术开发中心,广州510800)
船舶车钟操纵主机模拟装置的研制
张少明1,2,梁达成1,潘龙江1
(1.广东交通职业技术学院,广州510800,2.广东高校船舶自动化集成技术开发中心,广州510800)
介绍了船舶车钟操纵主机模拟装置的硬件组成,工作模式,控制程序及监控界面组态。
船舶车钟PLC人机界面
0 引言
目前国内船舶上使用的车钟大致有两类,一类是采用自整角机控制电路显示传令,另一类是使用手控凸轮或琴键开关等配合指示灯显示传令,实践证明这两类车钟弊端比较多。电力推进作船舶的主推进动力成本大大减少。由于其具有环保效果好、机动性高、自动化程度高以及安全可靠性好等特点,正成为新世纪大型水面船舶青睐的推进方式,所以设计用于电力推进的新型船舶车钟遥控系统有很大的市场空间。该模拟装置主要实现PLC驱动船舶主动力装置带动螺旋桨。船舶主推进动力装置动力部分采用步进电机模拟现实运转,运用了车钟原理、PLC编程语言、步进电机工作原理等相关知识。
1 系统硬件组成与设计
本项目主要研究制作船舶车钟操纵主机模拟装置。系统拓扑如图1所示,该模拟装置主要实现PLC驱动船舶主动力装置带动螺旋桨,船舶主推进动力装置动力部分采用步进电机模拟其运转。
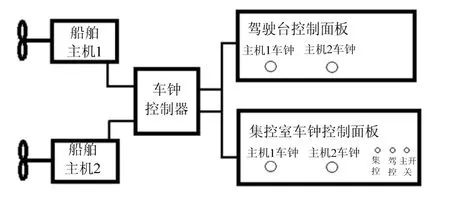
图1 系统拓扑图
1.1车钟
车钟系统是实现驾驶台与集控室,集控室与机旁之间进行车令传送与应答的重要设备,由驾驶台车钟,集控室车钟和机旁车钟组成。车钟系统一般有两种工作模式,一种是操控模式,另一种是传令模式。操控模式对应于在驾驶台遥控主机的情况,此时驾驶台车钟直接通过逻辑控制单元和转速控制单元对主机进行自动遥控。传令模式对应于在集控室或机旁操作的情况,此时,驾驶台车令首先传递到集控室或机旁,轮机员进行车钟应答后,再对主机进行相应的操作[1]。由于本装置不需要机旁操作,故取消了集控室与机旁间的车令传送与应答。
本系统的车钟由高精度电位器、发光二极管、自锁按钮、点动按钮组成。主机车钟用于传送停车,换向和转速设定等主机操纵指令。车速显示采用发光二极管,按后退三,后退二,后退一,备车,停车,完车,前进一,前进二,前进三排列。通过旋转电位器,改变电阻,改变输入的模拟量,通过PLC的运算,实现转信号的输出,通过改变显示灯的通断,实现车速的显示。
系统拥有驾驶台车钟和集控室车钟,驾驶台车钟和集控室车钟用于速度显示的发光二极管同速度的采用并联,实现两地的速度显示统一。在集控室车钟还设有集控按钮,架控按钮,用于切换控制部位。集控室和驾驶台的电位器通过外部继电器接入PLC,采用互锁。集控室车钟设有总开关。
1.2PLC的选型
该模拟装置主要实现PLC驱动船舶主动力装置带动螺旋桨,主要借助PLC的高速数据处理能力及PLC的高速输出能力。PLC具有高速运算及强大的控制能力,而且可改变里面的控制程序,拓展性强,方便制造者添加更多功能[2]。
考虑到系统要求有高速输入及输出,含模拟量信号输入,点数较多。系统选用易控王(兼容三菱FX2n-24MT)。
1.3I/O分配表
系统接线图局部[3,4],如图2所示。
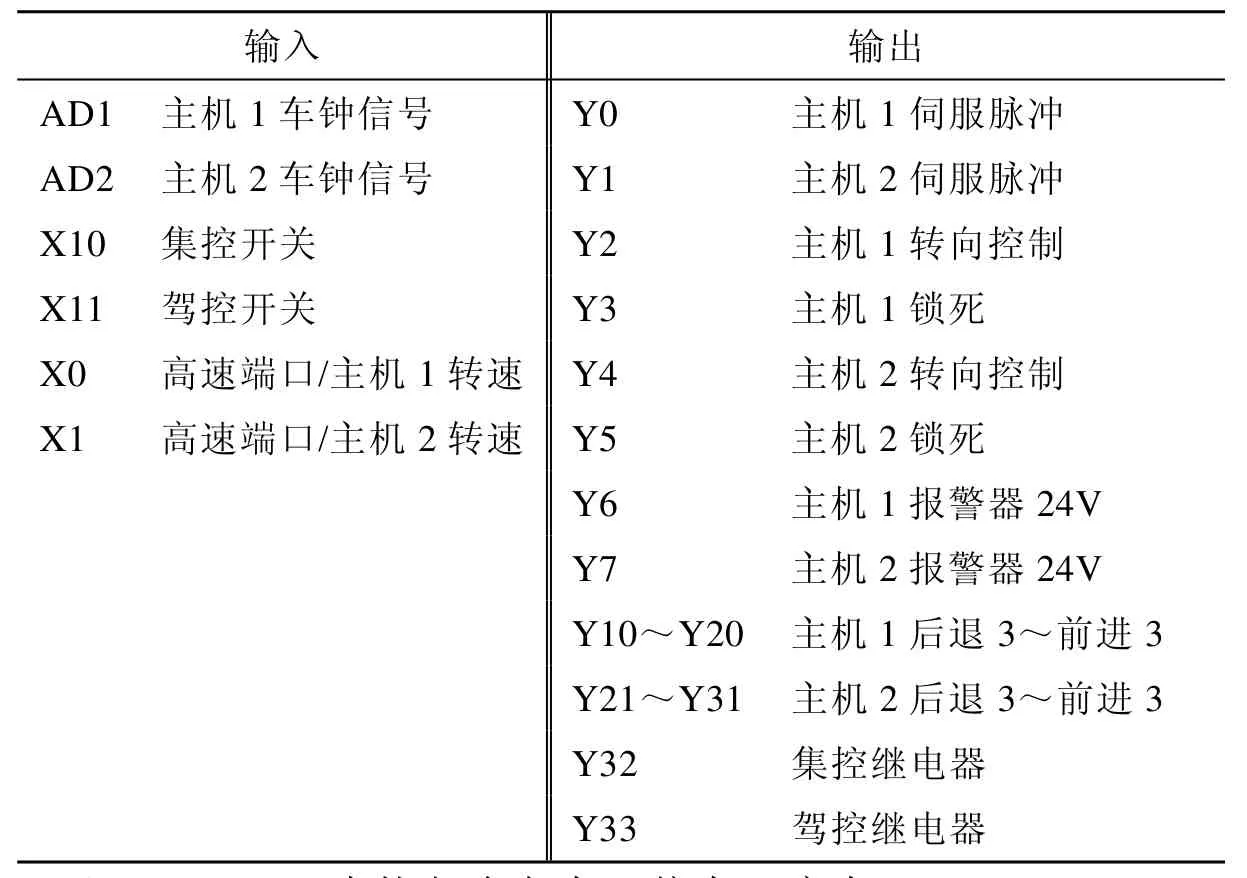
表1 PLC输入/输出分配表

图2 系统接线图局部
2 程序与人机界面
2.1程序的运行
使用易控王PLC,模拟量输入默认存在
D8030/D8031寄存器,与三菱PLC不同[4]。开机进入程序时的程序流程如图3。
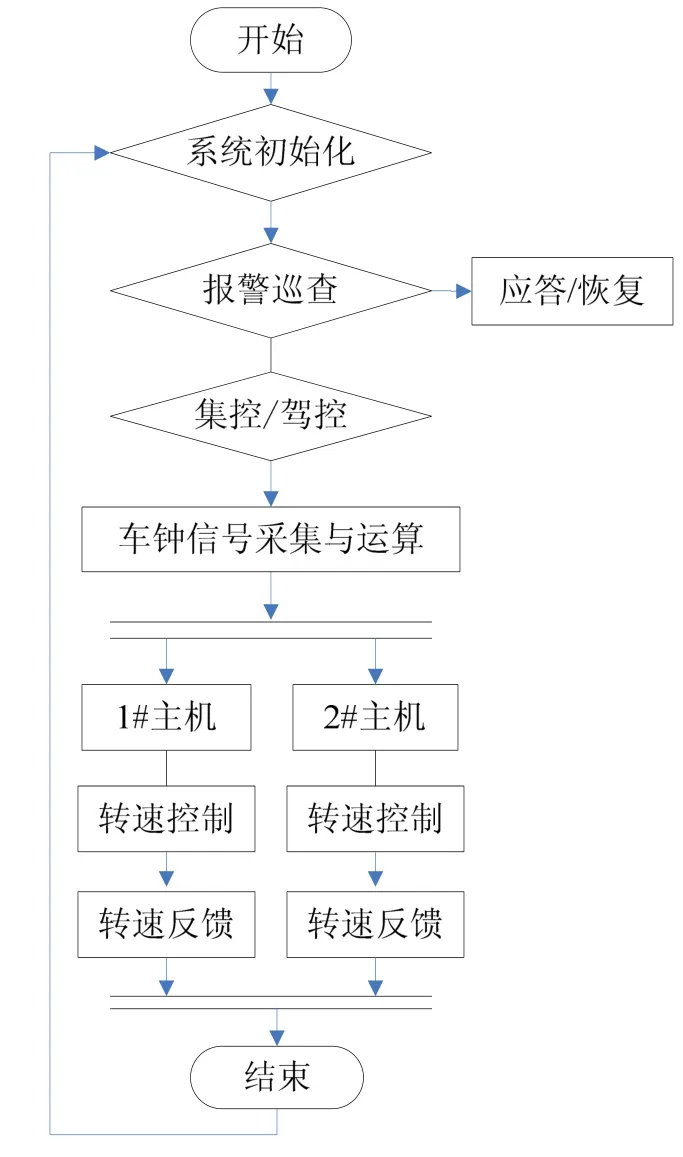
图3 程序流程图
在开机时系统初始化后,如果集控室两个车钟的不在停车位或任一车钟的不在停车位时便会发生报警,必须将发生报警的车钟旋至停车位,解除报警方可进入主程序。
由于电位从最小旋至最大时的输入的电压值0~10V,对应PLC采样数值为0~4000(因为电位器的阻值非线性,电位器在中间位置时采样值为1500,而非2000)经测算分配大致如表2,不同电位器实测值有变化,可以根据实际情况在程序中进行处理。

表2 车钟电位器采样信号分配表
在后退3~后退1时输出控制信号时,须将采样数值转为负数处理,此问题在选用多档位开关代替电位器即可将采样信号平均分配。
经PLC运算完采样信号后,每段可输出转速驱动信号和指示灯信号,并通过光电编码器将主机转速转换成脉冲信号反馈回PLC的输入端口。
在停车位时不输出脉冲,输出一个主机锁死信号,使主机不能手动盘车。在备车位和完车位只输出相应的指示灯,不输出其他信号。此时可手动旋转主机即盘车。
2.2人机界面组态
本系统有采用力控Forcecontrol 6.1软件进行人机界面(HMI)的制作,在上机位端进行主机转速状态的监视,如图4所示,监控界面包括主机车钟状态显示,主机转速显示,速度曲线与历史数据等参数。

图4 人机界面
3 小结
随着内河船舶自动控制技术的逐步推进,海船机舱自动控制系统基本为进口设备,本系统可以应用在实际内河船舶或小型电推船舶车钟自动控制系统中[6],装置成本低,控制灵活,可拓展性强,且维护方便,将成熟的自动控制技术在内河船舶进行推广和使用,可以提高内河船舶及小型船舶机舱自动控制技术,还可应用于在实训教学或船舶模型技术展示等。
[1]李世臣,徐善林,船舶机舱自动化[M].大连:大连海事大学出版社,2012.
[2]殷庆纵,李洪群.可编程控制器原理与实践(三菱FX2N系列)[M].北京:清华大学出版社,第1版,2010.3.
[3]郑辑光.过程控制系统[M].北京:清华大学出版社,2012.12.
[4]程树康.步进电动机及其驱动控制系统[M].哈尔滨:哈尔滨工业大学出版社,第l版,2006.12.
[5]三菱微型可编程控制器.FX系列编程手册[M]. 2006.
[6]吴志良,林叶春,孙旭清.船舶电气[M].大连:大连海事大学出版社,2012.
Simulation Device forship Telegraph Maneuvering Power Plant
Zhangshaoming1,2,Liang Dacheng1,Pan Longjiang1
(1.Guang Dong Communication Polytechic,Guangzhou 510800,China;2.Guangdong Universityship Automationsystem Integration Engineering Technology Development Center,Guangzhou 510800,China)
This paper introduces the hardware,working mode,control procedure and monitoring interface configuration of theship telegraphsimulation device.
ship telegraph;programmable logic controller,HMI
U666.15
A
1003-4862(2015)10-0067-03
2015-08-14
项目来源:2015年度广东大学生科技创新培育项目(攀登计划),编号:pdjh2015b0677
张少明(1974-),男,副教授。研究方向:轮机工程技术。
猜你喜欢
科学与技术(2019年21期)2019-04-27 01:40:10
珠江水运(2018年10期)2018-07-10 18:02:34
珠江水运(2017年19期)2017-11-10 19:08:41
中国信息技术教育(2016年23期)2017-01-03 22:24:15
铁道通信信号(2016年1期)2016-06-01 12:10:17
广东石油化工学院学报(2016年6期)2016-05-17 05:17:33
铁路通信信号工程技术(2015年4期)2015-02-28 16:58:55
中国水运(2014年4期)2014-07-24 15:55:33
机械工程师(2014年4期)2014-07-01 23:36:27
自动化博览(2014年10期)2014-02-28 22:33:41
