一种鱼雷主动声自导目标检测真实性判定方法
2015-10-24 05:45熊乾坤唐世轩
水下无人系统学报 2015年2期
关键词:鱼雷
熊乾坤,唐世轩
(中国人民解放军第91388部队,广东 湛江,524022)
一种鱼雷主动声自导目标检测真实性判定方法
熊乾坤,唐世轩
(中国人民解放军第91388部队,广东 湛江,524022)
针对鱼雷主动声自导检测目标不稳定问题,提出了一种量化的目标检测真实性判定方法。该方法根据鱼雷检测目标点的距离、方位等有关航行参数,采用坐标反算方法计算其在鱼雷内测坐标系中坐标,对目标点位置进行坐标转换,在同一平面直角坐标系中计算鱼雷检测目标点与实际目标点的距离,并据此判定鱼雷主动声自导检测目标的真实性。文中采用Python程序设计语言实现了该算法,算例验证了该方法简单有效,具有可行性。关键词:鱼雷; 主动声自导; 真实性判定; 坐标反算
0 引言
在鱼雷实航试验数据判读时,对鱼雷检测到的目标点进行科学分析,确定鱼雷检测目标点是否是真实目标,这是试验数据处理人员需要解决的重要问题。此前试验数据处理一般采用将鱼雷和目标航迹经坐标转换,绘制出试验实施的综合态势图,计算实际雷目距离和相对方位,并与鱼雷检测结果直接比较,根据经验分析鱼雷检测结果的真实性,无量化判据。文中根据鱼雷检测到的目标距离、方位、鱼雷当前坐标及姿态等有关航行参数,采用坐标反算方法计算出鱼雷检测目标点在鱼雷内测坐标系中的坐标,并计算鱼雷检测目标点与实际目标点的距离,可在将原点平移至鱼雷发射点的高斯平面坐标系中鱼雷、目标综合态势图上标示出鱼雷检测目标点的位置,计算鱼雷检测目标点与实际目标点的距离,根据采集数据精度及误差传递关系[1],分析该距离的允许范围,并根据该距离大小,判定鱼雷目标检测结果是否虚警,是一种量化的判定方法。
1 鱼雷主动声自导检测目标点坐标反算方法
1.1检测目标点在鱼雷内测坐标系中的坐标
鱼雷主动声自导检测目标点坐标反算的原理是: 鱼雷发现目标时,鱼雷坐标位置可由鱼雷内测记录航行参数读取,根据鱼雷主动声自导检测到的目标距离和方位以及鱼雷与目标之间的深度差,可以计算出目标与鱼雷之间的水平距离,再根据鱼雷航向角和主动声自导检测到的目标水平方位,可以计算出检测目标点相对鱼雷坐标点的几何方位,从而可以在鱼雷坐标点已知的情况下,计算出目标点的坐标。
每一型鱼雷均有自己的内测坐标系定义,不同的鱼雷内测坐标系定义不尽相同,某型鱼雷内测坐标系定义为: 以鱼雷出管时刻位置为坐标原点,鱼雷发射方向为纵轴x(向前为正),经过坐标原点,在水平面内与纵向垂直的方向为横轴y(从雷尾往雷头看向右为正),经过发射点垂直向下为深度轴h (向下为正)。鱼雷航向角定义为鱼雷轴线在水平面的投影与纵轴的夹角为航向角αTX(范围为-180°~+180°,发射方向为0°,向左为正)。鱼雷纵倾角αTH定义为鱼雷轴线与水平面的夹角(鱼雷“抬头”为正)。检测到的目标数据包括目标距离L(以发射和接收时间差计算的声传播距离),目标水平方位αOH(目标在鱼雷左侧为正),目标垂直方位αOV(目标在鱼雷上方为正)。为便于计算,定义内测绝对坐标系,该坐标系坐标轴定义与鱼雷内测坐标系相同,区别在于角度定义与常用高斯平面坐标系相同,即以发射时鱼雷纵向为0°,顺时针方向旋转一周角度增加到360°,正右方向为90°,正左方向为270°。
根据鱼雷检测到的目标距离L,鱼雷深度zT与目标深度hO的差值,可算出目标水平距离,即

若鱼雷或目标航行深度未知,也可以根据鱼雷检测到的目标距离L、目标垂直方位αOV、鱼雷当前纵倾角αTH,计算出目标水平距离,即

考虑到实航试验时目标航行深度一般已知且在鱼雷攻击过程中保持不变,鱼雷航行深度可从鱼雷内测记录数据读取; 而受水声传播影响,鱼雷检测到的目标垂直方位一般不如深度传感器测量的深度精确,应优先选用式(1)计算目标水平距离。
根据鱼雷内测坐标系中鱼雷航向角αTX,可以得到在内测绝对坐标系中鱼雷航向角为

根据鱼雷主动声自导检测目标点在内测坐标系中的方位,可以计算出其在内测绝对坐标系中的目标绝对水平方位为
根据目标水平距离LH,目标绝对水平方位α,鱼雷当前内测坐标(xT,yT),可以计算出检测目标点在内测绝对坐标系中的纵坐标

横坐标

1.2鱼雷内测坐标到高斯平面坐标的转换
根据文中鱼雷内测坐标系的定义,可以看出,该鱼雷内测坐标系实际上是将以发射点为原点的高斯平面坐标系进行了1个角度的旋转,这个角度即鱼雷发射方向,也就是发射鱼雷时潜艇艇艏向β,鱼雷内测坐标系与高斯平面坐标系的关系如图1所示。
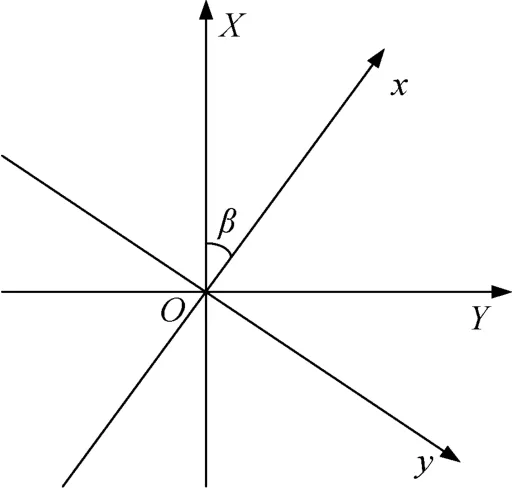
图1 鱼雷内测坐标系与高斯平面坐标系关系示意图Fig. 1 Schematic of the relationship between torpedo inner coordinate system and Gauss plane coordinate system
图中,XOY为高斯平面坐标系,xOy为鱼雷内测坐标系,β为发射鱼雷时潜艇艇艏向,其取值范围为0°~360°。因此,内测坐标系中点(x,y)转换到以发射点为原点的高斯平面坐标系中的点(X,Y)的转换公式为[2]


以上给出了根据鱼雷检测到的目标距离和方位计算鱼雷检测到的目标点相对发射点的高斯平面坐标,真实目标点相对发射点的高斯平面坐标可由目标经纬度数据根据GJB6304-2008 2000中国大地测量系统转换[3],并将原点平移到发射点得到。
真实目标的经纬度数据可由目标导航系统给出,或在目标上加装声信标,由水声测量设备测量得到。通过鱼雷检测到的目标点位置与目标点实际位置比较,计算这2点的直线距离,根据该距离是否在误差允许范围内,可以很方便地判断鱼雷检测到的目标点是否是真实目标。
2 算法实现
2.1基于Python语言的算法实现
文中涉及数学计算相对简单,不需使用功能强大的编程语言,采用Python程序设计语言即可实现。
Python 程序设计语言具有语法简单、代码规范、文档完善、标准库丰富、支持快速应用开发等特点,可以投入较少的时间和精力完成软件开发[4]。用Python编程实现文中提出的计算方法时,可定义以下3个函数:
InnerCoord2Gauss(InnerCoordX,InnerCoordY,shootdirection);
RangeAzimuth2InnerCoord(distance,azimuth_Hor,depth_O,InnerCoords_T,attitude);
LatLon2Gauss(latitude,longitude)。
函数InnerCoord2Gauss将鱼雷内测坐标转换成以发射点为原点的高斯平面坐标,输入参数为鱼雷纵坐标、鱼雷横坐标、鱼雷发射方向; 输出参数为相对北向坐标、相对东向坐标。
函数RangeAzimuth2InnerCoord(distance,azimuth_Hor,depth_O,InnerCoords_T,attitude),根据鱼雷检测到的目标距离、水平方位和目标航行深度、鱼雷坐标,计算目标点在鱼雷内测坐标系中的坐标。输入参数为目标距离、目标水平方位、目标航行深度、鱼雷纵坐标、鱼雷横坐标、鱼雷航行深度、鱼雷航向角和鱼雷纵倾角。输出参数为目标纵坐标、目标横坐标。
函数LatLon2Gauss(latitude,longitude)将经纬度数据转换成高斯平面坐标。输入参数为纬度和经度。输出参数为北向坐标,东向坐标。经度分带可默认按照6度分带处理。
2.2数据计算步骤及判定方法
假设1个主动声自导检测目标点的目标距离为L1,水平方位为1α,采用文中方法判定鱼雷检测到目标真实性的计算步骤如下。
步骤1: 查询该自导检测目标点相关数据。其中: 目标航行深度为hO1; 鱼雷内测坐标中纵坐标为x1、横坐标为y1; 鱼雷航行深度为hT1; 鱼雷航向角为αTX1;鱼雷纵倾角为αTH1。调用RangeAzimuth2InnerCoord函数计算得到检测到的目标点在鱼雷内测坐标系中的坐标(纵坐标为x2,横坐标为y2)。
步骤2: 查询本条次发射鱼雷方向为β1。调用InnerCoord2Gauss函数将鱼雷检测到的目标点在鱼雷内测坐标系中的坐标转换为以发射点为原点的高斯平面坐标(北向坐标x3,东向坐标y3)。
步骤3: 根据试验现场采集的数据,发射鱼雷时刻为北京时间t1,发射鱼雷时刻潜艇经纬度为lat1,lon1,调用LatLon2Gauss函数转换得到发射鱼雷时刻潜艇高斯平面坐标(北向坐标x4,东向坐标y4)。
步骤 4: 该检测点对应的北京时间为t1,根据某水声测量系统提供的数据,该时刻目标经纬度为lat2,lon2,调用LatLon2Gauss函数转换得到高斯平面坐标(北向坐标x5,东向坐标y5); 目标点转换为以发射点为原点的高斯平面坐标(北向坐标x6,东向坐标y6)。
步骤5: 计算在以发射点为原点的高斯平面坐标系中,鱼雷检测目标点(x3,y3)与外测实际目标点(x6,y6)的距离R,根据水声传播及鱼雷自导检测原理以及外测方法对鱼雷检测目标点进行误差分析,假设该误差值为R0,若R≤R0,则判定鱼雷检测到的目标位置与目标实际位置相符,鱼雷检测到的目标为真实目标; 若R>R0,则判定鱼雷检测到的目标位置与目标实际位置不相符,鱼雷自导检测到的目标不是真实目标。
3 算例
3.1算例1
已知目标距离为976 m,水平方位为2.5°,目标的航行深度80 m,鱼雷发射方向270.39°; 当前鱼雷航行参数为: 内测纵坐标4 308 m、横坐标4 100 m,航行深度120 m,航向角为-115.906°,纵倾角-0.078°; 将发射点和当前目标点经纬度转换为高斯平面坐标,并计算出目标点相对于发射点的高斯平面坐标(北向坐标3 779 m,东向坐标-4 361 m); 判定该检测点的真实性。
采用文中步骤1的方法,计算得出鱼雷检测目标点在鱼雷内测坐标系中的坐标(纵坐标3 921 m、横坐标4 995 m); 采用步骤2中的方法将该点转换为以发射点为原点的高斯平面坐标(北向坐标5 022 m、东向坐标-3 887 m)。
在以发射点为原点的高斯平面坐标系中比较鱼雷检测目标位置(北向坐标5 022 m、东向坐标-3 887 m)与目标实际位置(北向坐标3 779 m、东向坐标-4 361 m)两点直线距离为1 330 m,认为鱼雷检测目标位置与目标实际位置明显不符,本次鱼雷检测结果不是真实目标。
3.2算例2
已知目标距离807 m,水平方位0°,目标为水面舰,平均吃水5.3 m,鱼雷发射方向83°; 当前鱼雷航行有关参数为内测纵坐标4 653 m、横坐标-16 m,航行深度20.25 m,航向角0.781°,纵倾角-0.109°; 将发射点和当前目标点经纬度转换为高斯平面坐标,并计算出目标点相对于发射点的高斯平面坐标(北向坐标618 m,东向坐标5 393 m); 判定该检测点的真实性。
采用文中步骤1的方法,计算得鱼雷检测目标点在鱼雷内测坐标系中坐标(纵坐标5 460 m、横坐标-27 m); 采用步骤2的方法将该点转换为以发射点为原点的高斯平面坐标(北向坐标692 m、东向坐标5 416 m)。
在以发射点为原点的坐标系中比较鱼雷检测目标位置(北向坐标692 m、东向坐标5 416 m)与目标实际位置(北向坐标618 m、东向坐标5 393 m)两点平面直线距离为77 m,由于数据采集精度,声线弯曲等因素造成自导检测本身的不精确性等都会带来结果的不精确,认为误差在允许范围内,鱼雷检测目标位置与目标实际位置相符,本次鱼雷检测结果为真实目标。
4 结束语
鱼雷自导检测目标真实性判定是进行数据分析评定的基础,文中提出的根据主动声自导检测到的目标距离方位、鱼雷和目标的航行参数等,采用坐标反算方法计算出鱼雷检测到的目标点在鱼雷内测坐标系中的坐标,并将全部坐标数据转换为以发射点为原点的高斯平面坐标,在同一平面直角坐标系中计算鱼雷检测目标点位置与实际目标点位置之间的距离,根据此距离是否在可能存在的误差范围内来分析判定鱼雷主动声自导检测目标真实性的方法,经实际试验数据处理工作应用证明简单有效,可指导后续试验鱼雷主动声自导检测目标真实性判定工作。
由于水声信道本身存在的声线弯曲、声传播起伏、多途效应等等[5-6],造成鱼雷自导检测目标不精确,人工采集数据精度不高也会带来一定的误差,要进一步提高数据分析处理的精度,需要进一步分析研究,并采用相应手段提高原始采集数据的精度。
鱼雷主动声自导检测到的目标参数还有垂直方位、目标多普勒速度等,文中分析计算时未加以利用,实际工作中也可以根据试验实施时的雷目态势对这几项数据进行分析,作为综合判定的依据之一。目标检测的允许误差范围是本方法的关键判据,需要根据实际使用测量设备精度及试验现场数据采集精度、声线弯曲影响等诸多因素综合分析,以确保结论的可信度。
[1]肖怀秋,刘洪波. 试验数据处理与试验设计方法[M]. 北京:化学工业出版社. 2013
[2]嫄赵树. 线性代数[M]. 第4版. 北京: 中国人民大学出版社,2013.
[3]中国人民解放军总装备部. GJB6304-2008 2000中国大地测量系统[S]. 北京: 中国标准出版社,2008.
[4]Mark Lutz. Python学习手册[M]. 第4版. 李军,刘红伟,译.北京: 机械工业出版社,2011.
[5]周德善. 鱼雷自导技术[M]. 北京: 国防工业出版社,2009.
[6]刘伯胜,雷家煜. 水声学原理[M]. 第2版. 哈尔滨: 哈尔滨工程大学出版社,2010.
(责任编辑: 杨力军)
A Facticity Judgment Method for Target Detection of Torpedo Active Acoustic Homing
XIONG Qian-kun,TANG Shi-xuan
(91388th,The People′s Liberation Army of China,Zhanjiang 524022,China)
To solve the instability problem in target detection of torpedo active acoustic homing,a quantitative facticity judgment method for target detection is put forward. In this method,according to the target parameters detected by a torpedo,such as the range and azimuth,inverse coordinate calculation is adopted to calculate target point in torpedo inner coordinate system,then the coordinate of the target point is transferred. The distance between detected target point and actual target point is calculated in the same rectangular coordinate system to judge the facticity of the target detected by torpedo active acoustic homing. This algorithm is implemented with the programming language Python,and two examples prove the feasibility of the proposed method.
torpedo; active acoustic homing; facticity judgment; inverse coordinate calculation
TJ630.34
A
1673-1948(2015)02-0104-04
2014-12-28;
2015-02-10.
熊乾坤(1984-),男,硕士,主要研究方向为水下装备试验总体技术.
猜你喜欢
小哥白尼(军事科学)(2021年8期)2021-11-22
少儿科技(2021年4期)2021-01-11
小哥白尼(军事科学)(2020年8期)2020-05-22
兵器知识(2020年2期)2020-03-20
文萃报·周二版(2019年46期)2019-09-10
舰船电子对抗(2019年2期)2019-05-23
水下无人系统学报(2018年3期)2018-06-28
航空世界(2017年12期)2017-07-04
火力与指挥控制(2016年8期)2016-09-21
水下无人系统学报(2016年4期)2016-09-12