双轴旋转激光捷联惯导系统在线标定技术
2015-10-24 03:19:14刘永红刘明雍王海淼
水下无人系统学报 2015年3期
刘永红,刘明雍,谢 波,王海淼
双轴旋转激光捷联惯导系统在线标定技术
刘永红1,刘明雍1,谢波2,王海淼2
(1. 西北工业大学 航海学院, 陕西 西安, 710072; 2. 中国航天科技集团公司 第9研究院第16研究所, 陕西西安, 710100)
激光捷联惯导系统中陀螺和加速度计误差是影响系统导航精度的关键因素, 结合双轴旋转激光捷联惯导系统自身的结构特点, 提出了一种以速度误差和位置误差作为量测信息的双轴旋转激光捷联惯导系统在线标定方法, 该方法可以在静态及行进等不同状态下完成在线标定。车载试验结果表明, 在外场没有试验室标定设备如标定平板、高精度转台的条件下, 按文中设计的标定路径及标定方法, 可以准确估计出激光陀螺和加速度计的各项误差参数。该标定方法对标定环境、标定设备要求较低, 且方法原理简单、易于实现。
激光捷联惯导系统; 在线标定; 量测信息; 标定路径
0 引言
采用传统的十二位置标定法、速率标定法或多位置系统级标定方法在试验室可以事先标定出激光陀螺和石英加速度计的零位(零偏)、安装误差及刻度因数误差。但激光陀螺零位和石英加速度计零偏存在逐次启动不重复性误差, 加速度计的刻度因数也会随时间发生变化, 此外, 安装误差也会随温度、振动等发生变化。因此需要一定时间间隔内拆卸激光捷联惯导系统进行标定, 在工程实用中较不方便。文献[1]和[2]中的系统级标定方法均需一定的标定测试设备进行辅助, 且只能在静基座条件下进行标定; 文献[3]和[4]主要对加速度计外场标定进行了介绍。文中, 充分利用双轴旋转激光捷联惯导系统自身的结构特点,以速度误差和位置误差作为量测信息来进行在线标定。该方法不仅在静态条件下可以进行在线标定, 在行进中也可以完成在线标定。试验验证了这种算法的有效性。
1 惯性器件误差模型
在介绍双轴旋转激光捷联惯导系统在线标定技术前, 先对石英加速度计和激光陀螺的误差模型进行介绍。文中所选参考系为加速度计坐标系。
加速度计误差模型如下
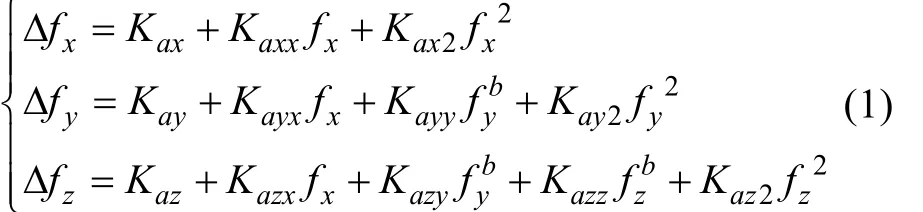
激光陀螺仪的误差模型

2 在线标定算法
根据双轴旋转激光捷联惯导系统自身的结构特点, 可将速度误差和位置误差作为量测信息对各误差参数进行在线标定[5-7]。
2.1系统误差方程
1) 姿态误差方程



2) 速度误差方程

3) 位置误差方程

4) SINS惯性器件误差模型

2.2滤波器设计
1) 状态变量的选取
为了实现激光捷联惯导系统的在线标定, 文中选取的状态变量如下(共33D),

2) 观测量的选取
由于在线标定过程中无法提供姿态基准, 因此姿态误差是无法测量的, 激光捷联惯导系统的速度、位置可依据GPS的测量值作为基准。文中选取观测量为

式中: VI, IP分别为激光捷联惯导系统的速度、位置输出; VGPS, PGPS分别为GPS的速度、位置输出。另外, 在静基座条件下, 可将速度为0, 位置为当地地理位置作为速度、位置基准来代替GPS测量信息。
至此可以写出Kalman滤波器的系统方程和量测方程

式中: F(t)为系统矩阵, 由式(3)~式(8)得到;H(t)为量测矩阵, 由式(10)得到; W( t), V( t)分别为系统噪声和量测噪声。
2.3标定路径设计
为了实现激光捷联惯导系统的所有误差参数的在线标定, 必须设计合适的标定路径对各误差量进行充分的激励[2]。文中设计的标定路径如表1所示。

表1 在线标定路径Table 1 The route of online calibration
3 试验验证
将激光捷联惯导系统安装在试验车上, 当转位机构的内外框架角都为0°时, 激光捷联惯组的Z轴与转位机构的内框架轴重合, Y轴与转位机构的外框架轴重合。激光捷联惯导系统上电, 使激光捷联惯组绕其Y轴正转90°, 此时外框架角为90°, X轴竖直向上, 此位置为标定的初始位置,然后按表1的标定路径进行在线标定试验。表2为在线标定结果。在车载环境下, 加速度计二次项有关的误差系数对激光陀螺捷联惯导系统定位精度影响较小, 因此试验中没有考虑加速度计二次项有关的误差系数。

表2 在线标定结果Table 2 The results of online calibration
从表2可以看出, 在线标定修正前、后3个陀螺零位误差较大, 分别为-0.014 089 33 (^)/S、-0.026 614 12 (^)/S和-0.005 866 07 (^)/S, x加速度计刻度因数误差也发生了较明显的变化, 为2.144 513 44 (^)/(s.g)。其他误差项虽存在变化,但不明显。为了对在线标定结果进行验证, 利用在线标定修正前、后进行约5 h的旋转调制导航,图1~图2分别是旋转调制导航纬度误差曲线图和经度误差曲线图。
从图中可看出, 在线标定修正后, 激光陀螺捷联系统导航定位误差有明显改善。修正前, 5 h导航定位纬度误差最大为9 154.7 m, 经度误差最大为10 218.1 m; 修正后, 5 h导航定位纬度误差最大为2 130.1 m, 经度误差最大为3 036.2 m。

图1 纬度误差曲线图Fig. 1 Curves of latitude errors versus time

图2 经度误差曲线图Fig. 2 Curves of longitude errors versus time
4 结束语
文中提出的双轴旋转激光捷联惯导系统误差参数标定方法, 充分利用了双轴旋转激光捷联惯导系统自身的结构特点, 不仅在静态条件下可以进行在线标定, 而且在行进中也可以完成在线标定。试验结果表明, 在外场没有试验室标定设备如标定平板、高精度转台的条件下, 按文中设计的标定路径及标定算法, 可以准确标定出激光陀螺和加速度计的各项误差参数。该标定方法对标定环境、标定设备要求较低, 适合工程需求, 且算法原理简单、易实现, 值得推广使用。
[1]吴赛成. 激光陀螺惯性测量单元系统级标定方法[J].中国惯性技术学报, 2011, 19(2): 185-189.
Wu Sai-cheng. Systematic Calibration Method for RLG inertial Measurement Unit[J]. Journal of Chinese Inertial Technology, 2011, 19(2): 185-189.
[2]谢波. 激光陀螺捷联惯导系统多位置标定方法[J]. 中国惯性技术学报, 2011, 19(2): 157-162.
Xie Bo. Multiposition Calibration Method of Laser Gyro SINS[J]. Journal of Chinese Inertial Technology, 2011,19(2): 19(2): 157-162.
[3]毛泽友. 无依托状态加速度计的新型标定方法[J]. 北京航空航天大学学报, 2011, 37(1): 123-126.
Mao Ze-you. Novelcalibration Method for Accelerometers of In-field Use[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(1): 123-126.
[4]吴文启. 激光陀螺捷联惯导系统参数稳定性与外场自标定[J]. 中国惯性技术学报, 2011, 19(1): 11-15.
Wu Wen-qi. Parameter Stability and Outfield Self-calibration of RLG-SINS[J]. Journal of Chinese Inertial Technology,2011, 19(1): 11-15.
[5]Goshen M D, Bar-Itzhack I Y. Observability Analysis of Piece Wise Constant Systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 1992, 28(4): 1068-1075.
[6]Hao Y L, Liu Z P. Analysis and Compensation on Static Error of Accelero Meter in GFSINS[C]//2009 International Conference on Measuring Technology and Mechatronics Automation: Hunan, 2009: 429-43.
[7]Fong W T, Ong S K, Nee A Y C. Methods for in-field User Calibration of an Inertial Measurement Unit without External Equipment[J]. Measurement Science and Technology, 2008, 19(8): 1-11.
(责任编辑: 杨力军)
Online Calibration Technology of Two-axis Rotation Laser SINS
LIU Yong-hong1,LIU Ming-yong1,XIE Bo2,WANG Hai-miao2
(1. School of Marine Science and Technology, Northwestern Polytechnical University, Xi′an 710072, China; 2. The 16 Institute of the 9th Academy, China Aerospace Science and Technology Corporation, Xi′an 710100, China)
The errors of gyros and accelerometers are the key factors affecting the precision of navigation of laser strap-down inertial navigation system(SINS). Based on the framework feature of two-axis rotation laser SINS, an online calibration method was proposed in this study by taking velocity and position errors as measurement information. This method can implement online calibration when the laser SINS are in both stable and moving conditions. Vehicle-borne test indicates that the error parameters of laser gyros and accelerometers can be calibrated precisely with the proposed calibration method and calibration route in the case without calibration devices such as the calibration flat and precise turntable. This calibration method is simple in principle and implementation, and does not require strict conditions for environment and equipment.
laser strap-down inertial navigation system(SINS); online calibration; measurement information; calibration route
TJ630.33; U666.1
A
1673-1948(2015)03-0218-04
2015-02-28;
2015-05-12.
刘永红(1981-), 女, 在读博士, 高级工程师, 主要研究方向为惯性导航技术.
猜你喜欢
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
制造技术与机床(2017年8期)2017-11-27 02:10:12
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
凿岩机械气动工具(2017年3期)2017-11-22 07:21:29
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
照明工程学报(2016年3期)2016-06-01 12:18:01
火控雷达技术(2016年1期)2016-02-06 02:18:01
焊接(2015年9期)2015-07-18 11:03:52