基于卡尔曼滤波的认知无线网络路由算法
2015-10-21 01:17薛伟宋成君
服装学报 2015年3期
薛伟, 宋成君
(江南大学物联网工程学院,江苏无锡214122)
基于卡尔曼滤波的认知无线网络路由算法
薛伟, 宋成君
(江南大学物联网工程学院,江苏无锡214122)
针对认知无线网络中频谱的动态性及节点移动性,提出一种基于卡尔曼滤波的认知无线网络路由算法,以提高链路的稳定性。该算法综合考虑主用户的频谱空闲概率与节点间的距离,兼顾端到端传输时延,对路由尺度进行设计,选择稳定度较高的路径进行通信;在路由维护阶段,通过卡尔曼滤波对节点移动速度进行预测,在链路断裂之前启动路由修复。最后通过NS2进行仿真,结果表明该算法在链路通信的稳定性、分组投递率、吞吐量等方面有明显的改善,提高了网络的整体性能。
认知无线网络;卡尔曼滤波;链路稳定性;路由尺度;链路预测
在认知无线网络中,认知用户通过对所处频谱环境的感知,当主用户未使用授权频段时,认知用户可以在不对授权用户造成有害干扰的情况下伺机使用这些空闲频段,而当主用户再次出现在该频段时,认知用户必须无条件退避,避免影响主用户的通信。由此改变了以往的静态频谱分配策略,实行动态的频谱接入方式,有效地解决了无线频谱资源紧缺的问题。
由于在认知无线电网络中所使用的频谱资源是通过检测的方式获得的,具有频谱动态性、频谱差异性以及频谱多样性,而认知无线网络所具有的这些新的特点,使得认知无线电环境下的路由算法和协议面临新的问题,需要设计能够反映认知无线电网络特点及适应于在认知无线电网络中工作的路由算法和协议。现阶段国内外很多学者都针对认知无线网络下路由协议及路由尺度进行了研究: Sharma S等[1]以信道未被主用户占用的概率作为次用户路由稳定性的评价指标;Abbagnale[2]提出了一种基于连通性的路由策略,在选择路径时避免选择效率低不稳定的瓶颈链路,但并未给出具体的算法;Islam Beltagy等[3]提出一种基于路线亲密度的路由选择指标,提高端到端吞吐量和减少延迟。黄宓等[4]提出基于容量满足度和链路稳定度的认知无线电路由度量,从认知网络的角度衡量链路的优劣;王尚等[5]综合考虑频谱管理与路径选择问题,对路由度量进行研究并以端到端时延为指标对路由协议性能进行分析;MAO R等[6]提出了在认知无线网络中使用备用路由以解决次用户业务流因主用户到达而产生的中断,但对于移动性较大的网络会因为节点位置的变化,使得备用路由不适用。
上述文献中只考虑频谱的动态变化,却忽略了节点的移动性,或假设节点是静止的,同时也未解决认知节点通信时的耳聋问题[7],在频谱动态变化和拓扑结构变化的共同作用下,加剧了链路的不稳定,因此需要考虑节点的移动性对路由的影响。
文中针对认知无线网络中频谱的动态性及节点的移动性,沿用AODV协议基本流程,对路由尺度进行设计,提出了一种基于卡尔曼滤波的认知无线网络路由算法,并且结合CRCN Simulator详细阐述协议的实现过程。
1 系统模型与假设
1.1 频谱的动态性
针对频谱的动态性,在认知无线网络中每个认知用户能够准确、动态地感知可用的空闲信道并对空闲信道的空闲概率进行预测,形成频谱机会集合(Spectrum Opportunities,SOPs)。
1.2 节点的移动性
针对节点的移动性,采用TwoRayGround无线传输模型对相对运动的节点间的距离进行计算:

式中:pr,pt分别为节点的接收功率与发射功率;hr, ht分别为接收与发射节点天线高度;Gr,Gt分别为接收与发射节点天线高度;d为节点间距离;L为路径损耗;设网络中节点的pt相同,Gt,Gr,hr,ht,L均为常数。
为保证数据的正确接受,设置最小接收功率阈值Pthred,通过Pthred及无线传输模型可以得到节点的有效传输半径d0,接收节点可以通过接收功率计算与上游节点间的距离,在路由维护阶段以此对链路稳定性进行预测。
1.3 节点配置
由于频谱动态性、频谱差异性以及频谱多样性,认知无线网络中节点间通信所使用的信道可能各不相同,难以通过感知到的授权信道建立公共控制信道,故使用一根传统天线专用于公共控制信道,以此进行信息交互和协同;一根全双工认知天线通过调整工作频率切换信道进行数据收发,以解决中间节点与上、下游节点通信时使用不同的信道带来的耳聋问题,同时减少信道切换延时。
CRCN Simulator中节点构件的配置如图1所示。
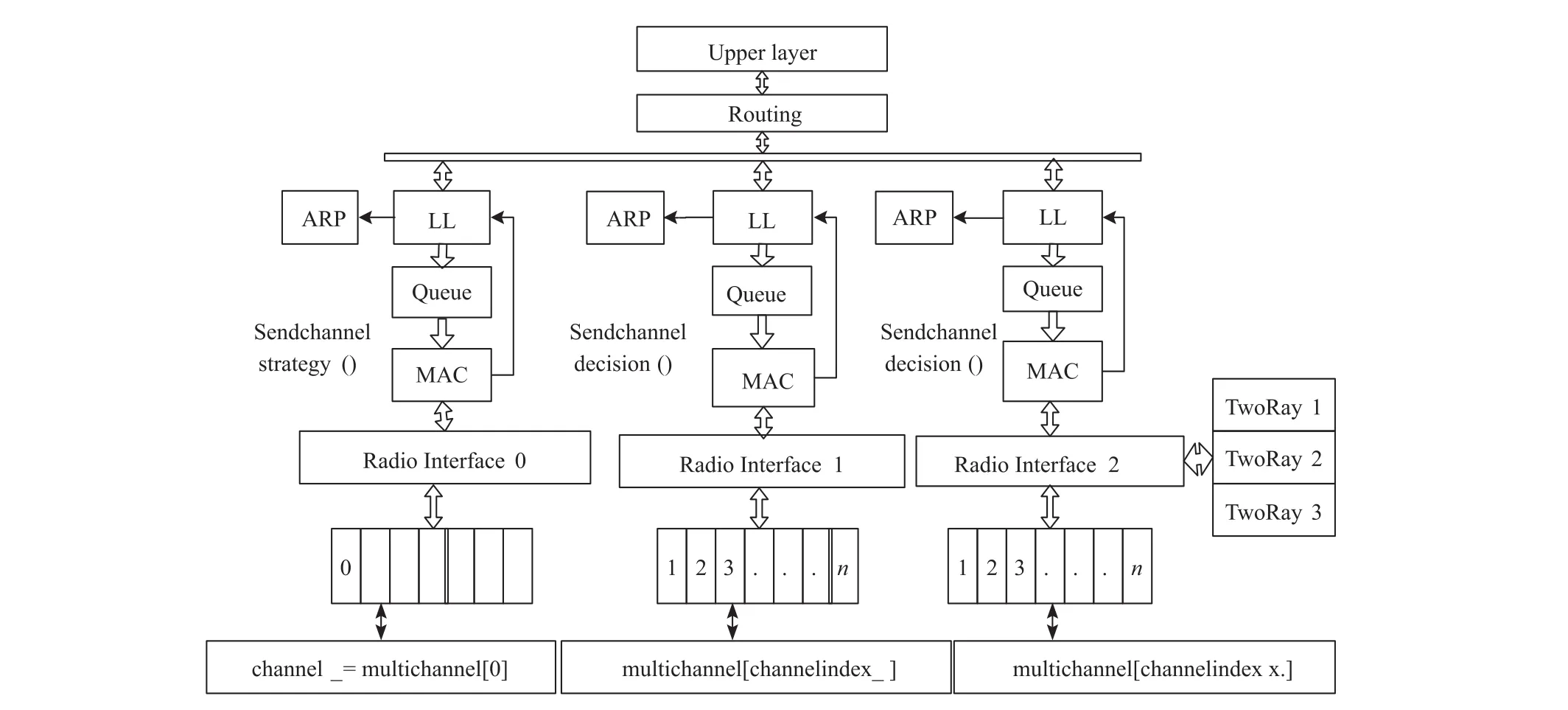
图1 CRCN Simulator中节点构件的配置Fig.1 Configuration of the node com ponent in a CRCN simulator
由于CRCN Simulator中节点的每个无线接口配置的信道数是相同的,而接口0只用于控制信道,所以接口0的channel_(当前接口所处信道)始终处于信道0,接口1,2用于数据通信。
2 路由机制与路由尺度设计
针对认知无线网络环境下频谱的特性以及节点的移动性,文中从链路稳定性的角度提出了一种基于卡尔滤波的认知无线网络路由协议SAODV(Stability Ad hoc On-Demand Vector routing),沿用并修改AODV协议基本流程,设计适用于认知环境下的路由协议。
2.1 路由发现
认知无线网络拓扑结构与路由建立进程如图2所示。

图2 认知无线网络拓扑结构与路由建立过程Fig.2 CRN topology and routing establish process
当源节点需要与目的节点通信时,首先检查路由表中是否有到达目的节点的路由,没有则发送路由请求RREQ(Routing Request),将本节点感知的可用频谱集合SOPs(包含频谱空闲率)添加到RREQ,然后通过控制信道广播出去;中间节点的物理层接收到请求包后,通过TwoRayGround模型计算与发送节点间稳定传输距离d0-di(di表示第i条链路中两节点简的距离,见图2)并添加到RREQ中,然后检查本节点与RREQ中上一节点是否有频谱交集,没有则丢弃;最后更新路由表,建立到源节点的反向路由,将本节点的频谱集合添加到RREQ中并转发。
2.2 路由应答
1)AODV协议是以最短跳数为原则选择路由,而实际应用中是根据最先到达的RREQ建立路由,这样虽然减少了时延,但在移动性较大和频谱动态变化的认知无线网络中通信链路极容易断裂,导致分组投递率、吞吐量下降,增加路由开销。文中通过修改路由请求的回路检查,中间节点可以接受来自同级(相同的转发次数)以下节点转发过来的RREQ,使路由请求以源节点为中心向外扩散的同时目的节点可以接受更多来自不同路径的请求。图2中,该部分伪代码描述如下:

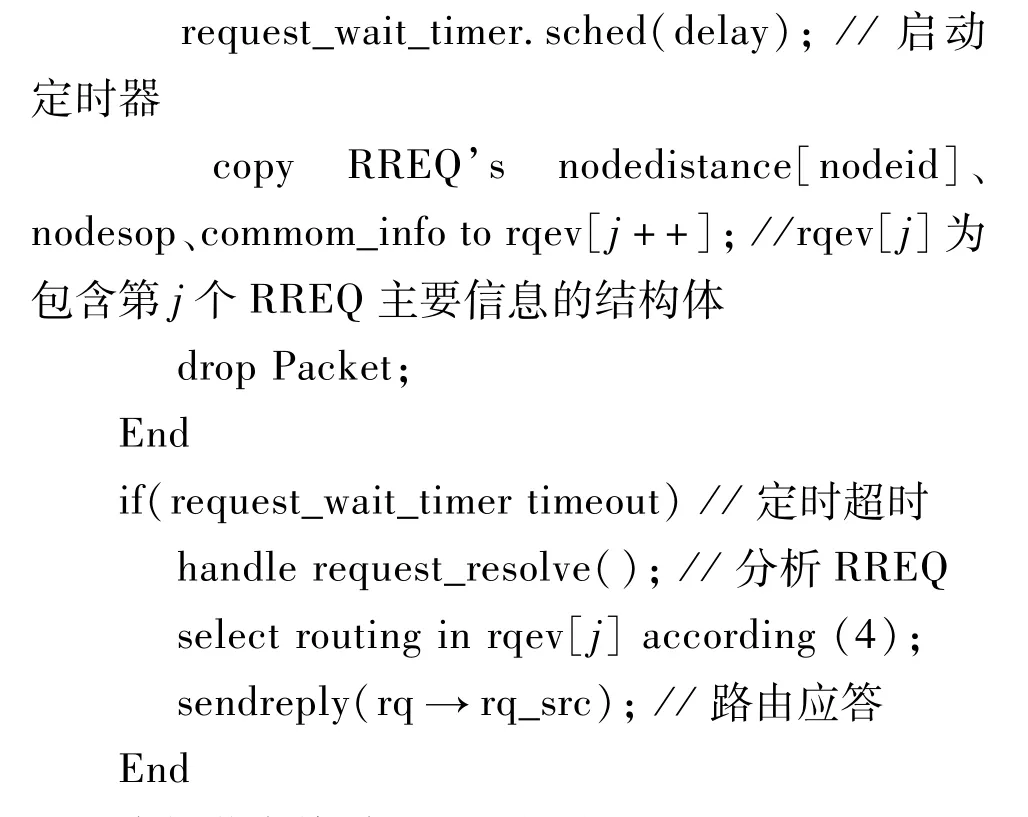
2)目的节点收到第一个RREQ时开始定时,只接受定时范围内的RREQ,然后对通过不同路径转发过来RREQ中的信息进行分析。针对频谱的动态性与节点移动性设计路由尺度选择链路最稳定路径:

式中:ξi为链路i的移动性稳定度,

其中,Sj为综合考虑动态性及移动性提出的路径稳定性指标。然而,该指标趋向于选择跳数最多的路径,增加了传输时延。对于移动速度高的认知无线网络,较多的跳数保证了链路稳定性,对于移动速度低的认知无线网络却增加了不必要的时延。故文中通过加权值综合考虑链路稳定性与时延:

其中:Qj为第j条路径稳定性能指标;k,K分别为路径中链路数和跳数;i为路径中第i个链路;pimax为链路i中两节点频谱交集空闲概率最大值;a为加权值。由上述可知,网络中节点移动速度越大,a应越大,反之亦然。
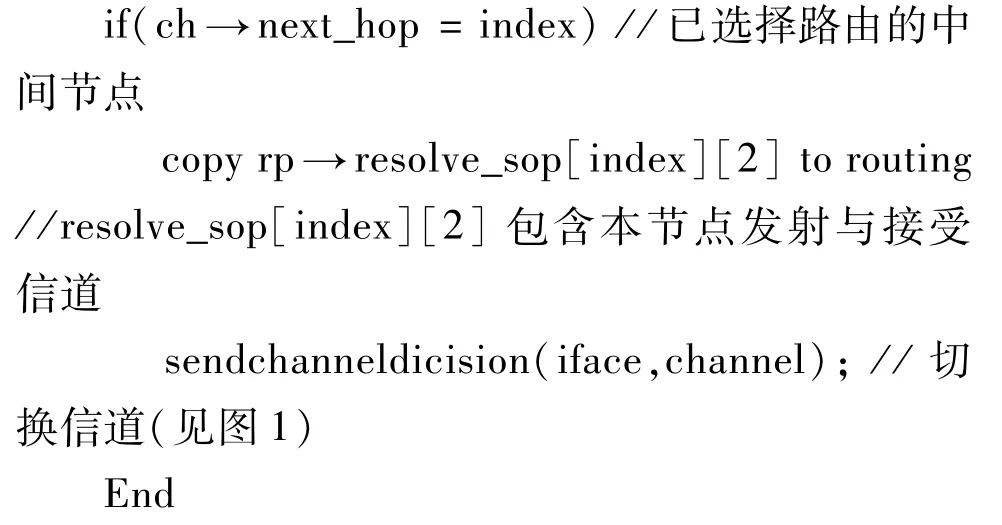
根据路由尺度选择路径后,按此前建立的反向路由发送路由响应报文RREP(Routing Rep ly),报文中包含中间节点与上、下游节点通信信道;中间节点接收到RREP后,找到对应本节点ID的控制信息(与上、下游节点通信所使用的授权信道),并使天线切换到相应信道准备通信;最后更新路由表,建立到目的节点的前向路由并转发RREP,当源节点接收到路由应答后路由就建立了。该部分伪代码算法描述如下:
if(rq→rq_dst=index)//RREQ到达目的节点
中间节点接受RREP的处理过程:
2.3 路由维护
路由建立后,链路节点间的通信可能会因为主用户的出现和节点之间的相对移动导致信道频繁切换及链路断裂,严重影响网络性能。
针对移动性,在路由维护阶段通过对节点相对距离的测量,预测节点移动速度,最终对链路的稳定性进行预测;在超出传输范围之前启动路由修复,因此需要对节点下一时刻的状态进行预测;同时由于节点间的信号干扰造成测量值有误差,因此,卡尔曼滤波[8]是解决这一问题的有效算法。卡尔曼滤波的离散过程方程和观测方程如下:

卡尔曼滤波时间更新方程:

卡尔曼滤波测量更新方程:
其中:wk,vk为均值为零,相互独立的过程白噪声和测量白噪声;Q,R为相应的协方差矩阵,由于Q,R难以准确获得,可根据网络中节点移动的速度进行取值。卡尔曼滤波通过时间更新方程与测量更新方程,不断地对目标状态及协方差进行预测、修正,不需要存储大量的观测数据,根据实时得到的数据进行滤波预测。具体实现如下:
1)设置危险传输范围,当节点在危险传输范围时,启动稳定性预测(见图2):

2)将从上游节点接收到的数据进行分组,由TowRay传输模型,计算节点之间距离dk。根据上一分组接收时计算的距离dk-1及接收时间间隔Δtk,以接收节点为参考节点,计算两节点的相对运动速度:

卡尔曼递推过程初值:

3)节点在危险传输范围时启动卡尔曼预测,从v2开始,卡尔曼滤波不断地对进行预测、估计、修正,提高状态估计精度。
4)需要判断节点是否超出传输范围,若

则接收节点发送链路断裂消息包到发送节点,发送节点提前启动路由修复;式(9)中ttx_delay为发送节点接收到链路断裂消息包后,队列中缓存的分组发送完后的延时,可以根据具体网络负载大小对时延进行设置。
针对频谱动态性,当认知用户感知到主用户出现,而认知用户正在使用主用户的授权信道,则启动路由修复,对转发过来的数据分组缓存,同时认知节点发送包含当前可用信道的信道策略报文与下游节点沟通协商选择空闲信道(见图1),切换信道以避免对主用户的干扰。
3 仿真分析
目前,针对认知无线网络路由协议的仿真大多采用Roman模型[9],而Roman模型中信道数与接口数是相同的,因此该模型从成本与算法实际可实现性考虑是不合适的。文中采用基于NS2[10]平台CRCN模拟器(支持信道数与接口数不同,见图1)对协议仿真,仿真环境参数见表1。
仿真结果如图3~图6所示。其中AODV协议支持认知无线网络环境下多信道通信。

表1 仿真环境参数Tab.1 Simulation parameter

图3 认知无线网络环境下网络吞吐量比较Fig.3 Throughput com parison in the CRN environment
图3反映了吞吐量在链路断裂前后的变化。由于链路断裂之前对链路稳定性进行卡尔曼预测,提前启动路由修复,建立路由,恢复通信,提升了网络吞吐量。
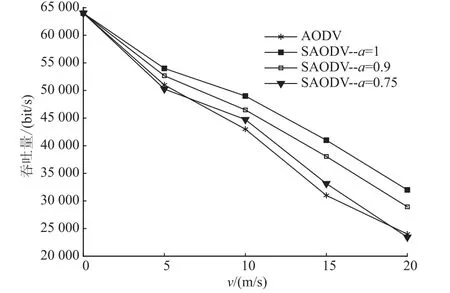
图4 吞吐量在不同加权值下随速度的变化Fig.4 Throughput under different weight along w ith speed
由图4可以看出,随着加权a的减小,选择的路径跳数较少,导致链路相对容易断裂,使网络吞吐量减小。
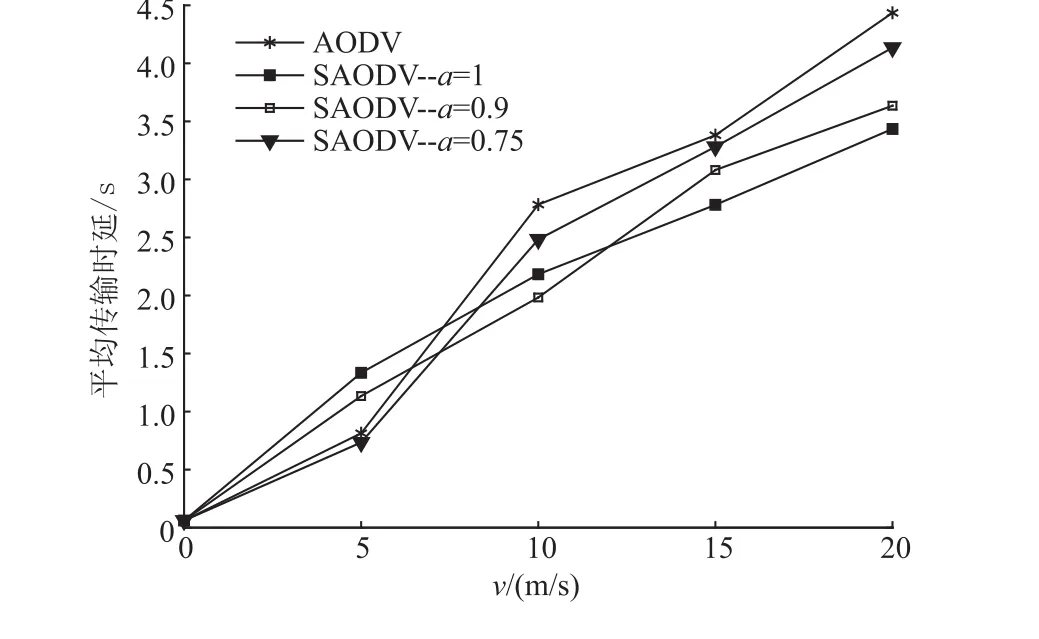
图5 平均传输时延在不同加权值下随速度的变化Fig.5 Average transm ission delay under different weight along w ith speed
由图5可以看出,在节点速度低的网络中,加权a的减小导致选择的路径跳数较少,但减少了传输时延;但随着节点移动速度的增加,由于较少的跳数使得链路容易断裂,传输时延反而较大。
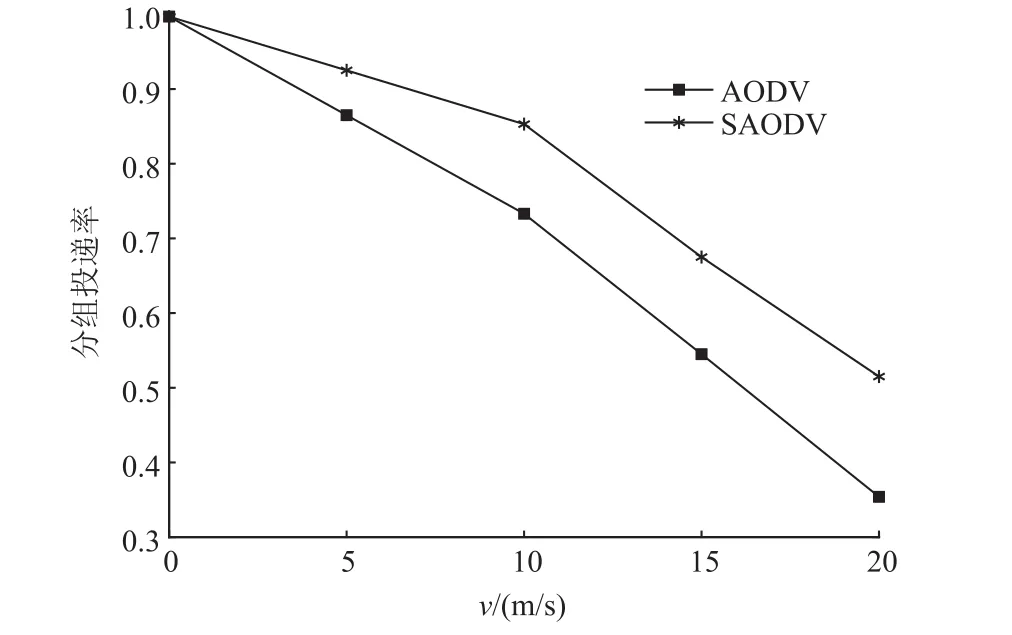
图6 分组投递率比较Fig.6 Packet delivery ratio com parison
由图6可以看出,由于SAODV协议对节点间链路稳定性进行预测,使上游节点对分组进行缓存,并建立新的路由,减少了链路断裂后造成的分组丢失;而AODV协议是基于最短跳数,链路容易断裂,同时没有预测机制,节点移动速度较大的情况下分组丢失严重。
4 结 语
文中针对认知环境下无线网络中的差异性与共同特征,综合考虑频谱的动态性与节点的移动性对路由协议及路由尺度进行设计,对链路稳定性进行预测,通过实验结果显示,对分组投递率、网络吞吐量等性能有提升。
[1]Sharma S,YIShi,HOU Y T,et al.Joint flow routing and relay node assignment in cooperative multi-hop networks[J].IEEE Journal on Selected Areas in Communications,2012,30(2):254-262.
[2]Abbagnale A,Guomo F.Connectivity-driven routing for cognitive radio ad-hocnetworks[C]//Sensor Mesh and Ad Hoc Communications and Networks(SECON).Boston:IEEE,2010:1-9.
[3]Islam Beltagy,Moustafa Youssef,Magdy Abd.Channel assignment with closeness multipath routing in cognitive networks[J]. Alexandria Engineering Journal,2013,52(4):665-670.
[4]黄宓,韩庆文.基于遗传算法的认知无线电网络路由策略研究[D].重庆:重庆大学,2012.
[5]王尚,汪一鸣.认知无线电Ad Hoc网络路由算法的研究与实现[D].苏州:苏州大学,2013.
[6]MAO R,LIH.Protecting cognitive radio networks against primary users:a backup path approach[C]//Global Telecommunications Conference(GLDBECOM2001).Houston:IEEE,2011:1-6.
[7]MA Huisheng,ZHENG Lili,MA Xiao.Spectrum aware routing for multi-hop cognitive radio networks with a single transceiver [C]//Proceedings of Third Intemational Conerence on Cognitive Radio Oriented Wireless Networks and Communications. Singapore:IEEE,2008.
[8]Kalman R E.A new approach to linear filtering and prediction problem[J].Transaction of the ASME Journal of Basic Engineering,1960,82(4):34-45.
[9]Roman A C.Addingmultiple interfoue support in NS-2[EB/OL].(2007-01-01)[2013-12-15].http://personales.unican.es/ aguerocr/
[10]徐雷鸣,庞博,赵耀.NS与网络模拟[M].北京:人民邮电出版社,2003.
(责任编辑:邢宝妹)
Routing Protocol Based on the Kalm an Filter for Congnitive Radio Networks
XUEWei, SONG Chengjun
(School of Internet of Things Engineering,Jiangnan University,Wuxi214122,China)
A routing algorithm based on the Kalman filter for cognitive radio networks is proposed to solve the problem of dynamic spectrum in cognitive radio networks and nodemobility and to improve the stability of the link.Consider the spectrum idle probability of primary users and the distance between nodes,designs routing metrics select a higher stability path to communicate.In the routing maintenance phase,predict the relative distance of the upstream to the downstream node through the Kalman filter and start the routing repair to repair broken link.NS2-based platform CRCN simulation results show that the algorithm in the stability of the communication link,packet delivery ratio,throughput, etc has obvious improvement on the overall performance of the network.
cognitive radio networks,Kalman filter,link stability,routingmetric,link prediction
Email:xwxhy911@163.com
TP 393
A
1671-7147(2015)03-0253-06
2014-11-05;
2014-12-10。
国家自然科学基金项目(61374047)。
薛 伟(1963—),男,江苏海门人,副教授,硕士生导师。主要从事无线网络与嵌入式系统应用等研究。
猜你喜欢
国际太空(2021年11期)2022-01-19
铁道通信信号(2020年12期)2020-03-29
北京航空航天大学学报(2017年9期)2017-12-18
信息安全研究(2016年4期)2016-12-01
电源技术(2016年9期)2016-02-27
华东理工大学学报(自然科学版)(2015年3期)2015-11-07
移动通信(2015年17期)2015-08-24
电源技术(2015年1期)2015-08-22
河南科技(2014年24期)2014-02-27
电子设计工程(2014年6期)2014-02-27