上海白龙港污水处理厂专用RTU设计
2015-10-21 01:19:46梅会儒许维东李福祥陈焕
服装学报 2015年1期
梅会儒, 许维东, 李福祥, 陈焕
(上海理工大学光电信息与计算机工程学院,上海200093)
上海白龙港污水处理厂专用RTU设计
梅会儒, 许维东*, 李福祥, 陈焕
(上海理工大学光电信息与计算机工程学院,上海200093)
针对上海白龙港污水处理厂厂外闸门井信号采集改造项目要求提出一种专用远程终端控制系统(RTU)设计方案。该RTU在硬件上以Cortex-M3微处理器为核心,采用一系列的隔离抗干扰措施,保证系统的高性能低成本以及运行的稳定性;软件上采用ModBus TCP/IP协议通过工业以太网将现场采集到的数据传输给上位机,实现了远程监控。详细描述了RTU的硬件设计方法及软件实现原理,最后给出了通信的测试结果。
远程终端控制系统;隔离;ModBus TCP/IP协议;远程监控
在环境保护和环境治理的大环境下,我国各水域对水质达标都有严格的规定,作为上海市污水治理二期工程的一个重要组成部分上海白龙港污水处理厂更是发挥着极其重要的作用。上海白龙港污水处理厂充分利用现有的污水处理构筑物,一部分污水进入高效沉淀池处理,另一部分进入新建多模式生物反应池处理,两部分尾水达标后通过出口泵房、高位井深水排放到长江[1]。在此过程中实时监测污水排放的水流总量及瞬时流量,并通过闸门的开和关控制污水的排放极为关键。文中针对该项目特点设计了一款远程终端控制系统(RTU),实现远程监控功能,使得技术人员无须亲临现场就可以监视到现场所有信息并控制现场设备的运行状态。
1 项目要求分析
根据白龙港污水处理厂厂外闸门井信号采集改造项目要求,每个闸门井房所需采集的信号为两台电动闸门的状态信号和两台流量计的流量信号,需要测量流量计的累积脉冲信号和瞬时模拟信号。使用RTU对现场的各项数据进行采集,各站点RTU模块与中控室之间通过3G设备连接至运营商3G网络,各节点连接采用3G无线交换机。现场控制层则采用ModBus TCP/IP工业以太网通信。现场数据采集后将统一传输至中控室操作电脑,并通过OPC通信将现场数据转发至相关数据库,为监测系统显示界面及报表系统提供数据源。
考虑到闸门井房现场为无人值守状态,除了要保证RTU自身更加稳定、可靠地运行,还要求RTU可控制无线设备的供电,在无线设备出现异常死机的情况下可对该无线设备电源进行断电后再通电,达到重启的要求。
因此根据以上设计要求,文中针对项目特点定制一套RTU的设计方案,并从系统的体积、可靠性及成本上进行综合考虑,在电路上采用多项隔离措施并将所有功能都集成到一块主板上,降低产品的成本,减小系统体积,增加系统可靠性。
2 硬件设计方案
2.1 系统模型
RTU与现场仪表通过有线方式连接采集数据。上位机作为主机利用ModBus TCP/IP协议与现场RTU进行通信。在通信过程中,上位机对所有挂接在以太网上的RTU采用轮询方式采集数据。系统模型如图1所示。

图1 系统模型Fig.1 System m odu le
为达到功能需求,RTU需要能够采集4~20 mA模拟电流量、数字脉冲量、数字开关量,控制继电器输出,提供本地显示功能,通过ModBus TCP/IP协议与上位机进行通信。
2.2 硬件电路设计
硬件总体结构如图2所示。其中,CPU选取了NXP公司推出的基于ARM Cortex-M3内核的微控制器LPC1768,该芯片内部集成了丰富的外设,而且运算速度快,适用于低功耗及处理要求高度集成的嵌入式应用[2-3]。另外,硬件上还包括了8路4~20 mA模拟信号采集模块;2路脉冲计数模块;6路数字开关量测量模块;4路继电器输出模块;以太网通信模块。
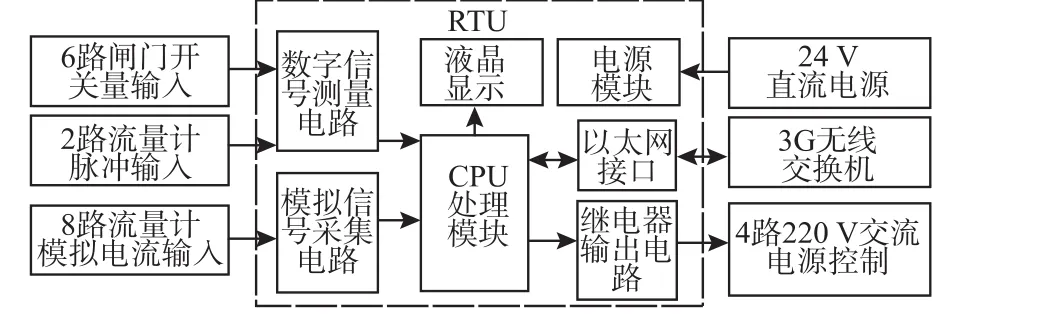
图2 硬件电路结构框架Fig.2 Diagram of the hardware structure
为了提高系统的抗干扰能力及稳定性能,所有与RTU板子相接的外部接口都采取隔离措施。数字信号测量电路的数据传输速度要求不高,使用光电隔离技术;模拟信号采集电路与CPU之间采用SPI接口通信,因此利用磁耦隔离技术[4];以太网接口采用隔离变压器进行以太网信号隔离;继电器输出电路采用机械继电器实现直接隔离;电源模块运用隔离式DC/DC转换器实现电源隔离。
2.2.1 电源模块 电源模块为系统提供稳定、连续的电流,是确保系统正常工作的核心部件。同时电源部分是系统中最薄弱的一环,系统出问题时的大部分因素都是由电源部分引起的,因此电源部分的设计至关重要。电源电路如图3所示。
在系统功耗方面,采用最大功耗方式进行计算。其中:采用5 V电源电路的最大耗电电流为124. 76 mA;采用3.3 V电源电路的最大电流为190.19 mA。而电源电路上采用一块2 W的隔离式DC/DC电源芯片PWB2405及一块1.5W的PWB2403电源芯片,完全满足系统需求。
2.2.2 模拟信号采集电路 根据设计要求,系统需要能够采集8路4~20 mA电流,测量精度要求达到千分之一,测量速度要求每秒钟可完成8个通道的转换,因此文中直接将100Ω的精密电阻串连到被测电流回路中,实现电流到电压的简单转换。由于系统要求的转换速度较低,因此采用一个多路复用器芯片ADG508通过8选1的方式,在任意时刻只将一路被测电路接入A/D转换芯片,然后将运放及滤波电路放在通道选择电路之后,大大节省了电路成本。通道选择电路如图4所示。其中,电流输入端二极管D3主要作用是防止输入电流过大时, ADG508发生闩锁效应[5],保证电路的安全性。

图3 电源电路Fig.3 Power circuit

图4 通道选择电路Fig.4 Channel-selecting circuit
2.2.3 数字信号测量电路 脉冲量与数字开关量的测量电路相同,数字量测量仅需测出开关状态,脉冲量则需测出脉冲个数。在实际应用中,脉冲输入量分为有源和无源两种方式,为了同时适用于这两种接入方式,文中在电路上为每个通道设计了一个模式选择的接口,如图5所示。这样当J5的1,2短接时,可测量无源的脉冲信号;当2,3短接时,则用于测量有源脉冲信号。
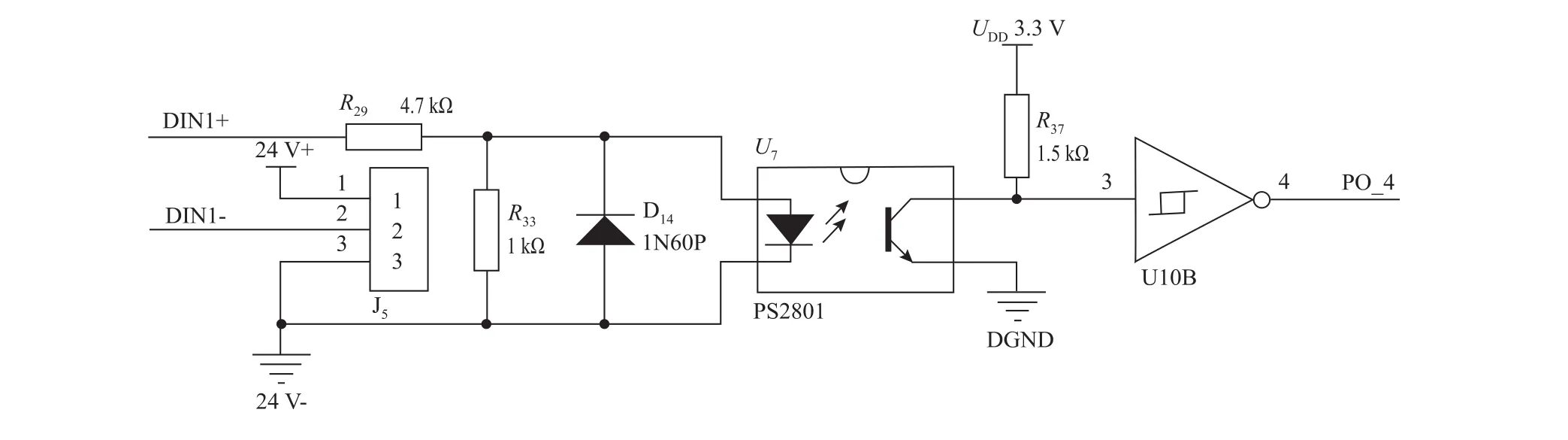
图5 脉冲及数字量输入模块Fig.5 Pulse and digital inputmodule
根据设计要求,脉冲计数功能要求最大能够测出10 kHz的脉冲,因此文中采用高速光耦PS2801,经过实际测试其开关速度可达40 kHz。R33可有效防止光耦的误导通,R29主要起限流的作用;肖特基二极管D14导通管压降极低,可有效防止输入信号接反时损坏光耦的作用。
2.2.4 继电器输出电路 继电器输出模块采用达林顿管驱动机械继电器的方式进行输出控制,具体电路如图6所示。
CPU输出的控制信号经过光耦隔离后传给驱动芯片ULN2803,ULN2803每个通道都具有最高500 mA电流的输出能力,输出电压最大达50 V,非常适合逻辑接口电平的数字电路和需要较高的电流/电压的应用场合。继电器选用PCN105D3MHZ,输出最大可控制277 V/3 A的交流电,输入电压5 V,功耗达120 mW。
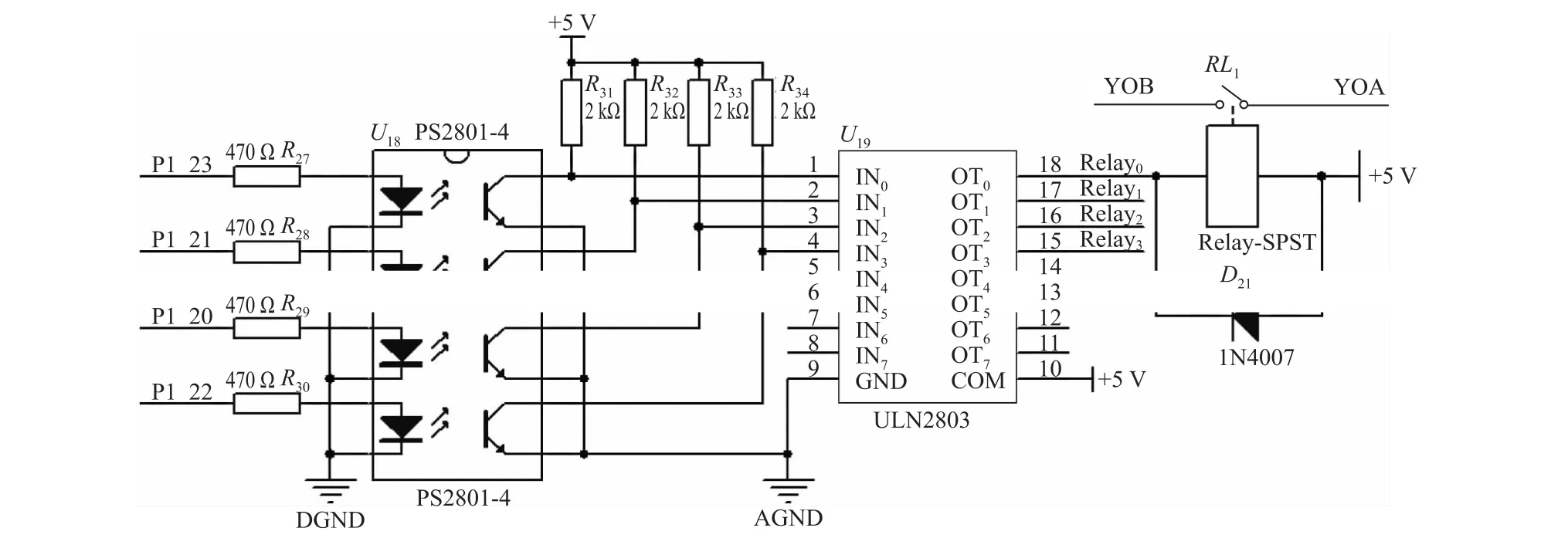
图6 继电器输出模块Fig.6 Relay outputm odu le
2.2.5 ModBus TCP/IP通信接口 使用ModBus TCP/IP协议进行通信时需要借助以太网接口。以太网控制器一般由以太网媒体接入控制器(MAC)和物理接口收发器(PHY)组成,这两个组成部分对应OSI模型的两个层——物理层和数据链路层。系统的控制器LPC1768以太网模块仅包含一个功能齐全的10或100 Mbit/s以太网MAC(媒体访问控制器),而不包含PHY物理层。因此,文中外扩了一个PHY物理层芯片KSZ8041,再通过隔离式变压器RJ45插座实现系统的以太网通信功能。RJ45为隔离式变压器,具有信号增强、阻抗匹配、波形修复、信号杂波抑制和高电压隔离等作用。
2.2.6 液晶显示模块 系统显示部分采用图形型液晶显示模块SHZJ-A19264B5,显示像素为192*64 dots,具有接口简单,容易操作以及低能耗等众多优点。显示模块可动态显示系统的测量结果,不仅为RTU的现场安装及调试提供数据参考,方便安装人员的安装与调试,同时也便于后期的现场视查和检修工作。
3 软件设计方案
RTU的核心软件是一个典型的实时多任务系统,包括通信、数据采集及控制等软件部分。因此,系统采用开放源代码的实时操作系统μC/OS-II作为软件的运行平台,可明显简化实时任务的组织与调度,提高CPU资源的利用率,充分保证软件系统的可靠性,并缩短开发周期。
3.1 系统任务划分
μC/OS-II属于抢占式实时系统内核,即任何时候具有最高优先级且已就绪的任务先执行[6]。RTU系统软件完成的主要功能有实时数据采集、A/D校准、继电器控制、数据通信以及液晶显示等。根据系统完成的功能,划分出系统各大任务,有数据采集、通信、A/D校准、显示及输出控制。从实时性要求来看,比较以上几个工作的优先级,其优先处理的顺序为数据采集 >以太网通信>A/D校准 >液晶显示 >继电器控制。详细配置情况见表1。

表1 任务表Tab.1 Task table
3.2 应用层软件逻辑设计
从数据传递和加工角度出发,使用数据流图的方式表达系统的逻辑功能、数据在系统内部的逻辑流向和逻辑变换过程,数据流图描述输入数据流到输出数据流的变换,能够非常清晰地表现系统的数据模型[7],系统数据流的顶层结构如图7所示。

图7 顶层数据流结构Fig.7 Top data flow diagram
3.2.1 输入测量 包含了模拟量输入、脉冲输入及数字开关量的输入,其中模拟电流测量部分首先需要通过组态文件确定即将测量的通道,在进行A/D采样后,还要经过一阶滞后数字滤波,线性化,最后再计算出流量值。
3.2.2 校准 设备在出厂前需要对A/D进行校准,校准过程中仍需要外部通过通信端口发送置零电流和置满电流时的准确电流值等各数据,最后将计算后的数据存于CPU内Flash中永久保存下来。当设备出厂后不允许再次校准。
3.2.3 组态 组态包括:①选择模拟量采集的通道数;②设置液晶显示的内容;③配置以太网通信端口的参数。
3.2.4 通信 采用ModBus TCP/IP协议,RTU作为从机不断监听上位机发来的数据包,并对符合要求的请求给予应答。
3.2.5 输出控制 根据通信任务确定每10 min的时间内是否接收到数据包,如果在连续30 min的时间段内没有接收到数据包则由RTU输出控制3G无线交换机的电源,使其断电后再上电,达到恢复故障的目的。
3.2.6 液晶显示 根据系统采集到的数据及采集的通道数,显示各个测量值。
3.3 数据通信
为使分布在现场的所有RTU能够可靠地与上位机进行通信,且同时所有设备可以方便互联,采用标准的通信规约十分重要。采用工业中较为流行的ModBus TCP通信协议是其最佳选择。
ModBus TCP结合了以太网物理网络、网络标准TCP/IP协议以及以ModBus为应用协议标准的数据表示方法。ModBus TCP数据帧格式如图8所示。
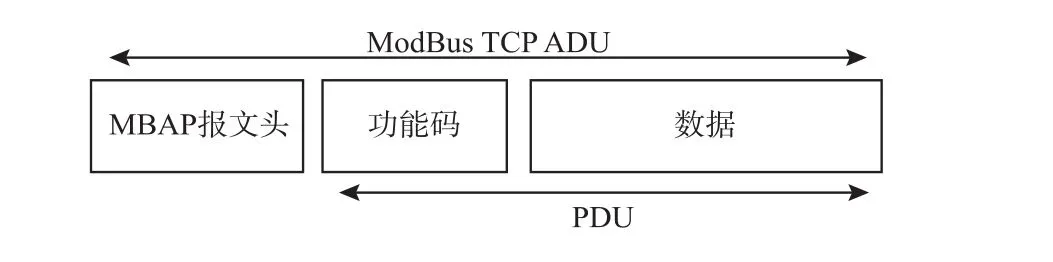
图8 M odBus TCP数据帧格式Fig.8 M odBus TCP data frame form at
ModBus TCP数据帧中MBAP报文头主要包含事务处理标识符以及数据长度等有效信息,其中事务处理标识符用于事务处理配对,标识ModBus帧的次序。功能码与数据部分共同组成ModBus协议数据单元(PDU),系统根据PDU内容,通知系统要执行的操作及内容,实现系统间的数据交换[8]。
为实现ModBus TCP的通信协议,系统除了能够识别和响应ModBus TCP数据帧外,同时还需要依赖TCP/IP协议实现帧的传输。因此,文中在系统软件中移植了u IP 1.0以及Free ModBus V1.5两种开源协议代码,其中u IP 1.0主要提供TCP,IP, ICMP,ARP等协议,实现应用数据的组帧和传输; Free ModBus协议主要定义了数据的模式和功能,并实现底层寄存器的读写操作。
进行通信时,系统首先需要与上位机建立连接,实现TCP协议的三次握手。握手成功后,系统开始监听502端口的数据,并使用中断方式进行数据接收,ModBus TCP通信处理过程如图9所示。

图9 M odBus TCP通信流程图Fig.9 Flow chart of M odBus TCP communication
4 RTU系统测试
文中设计的RTU系统实物如图10所示。
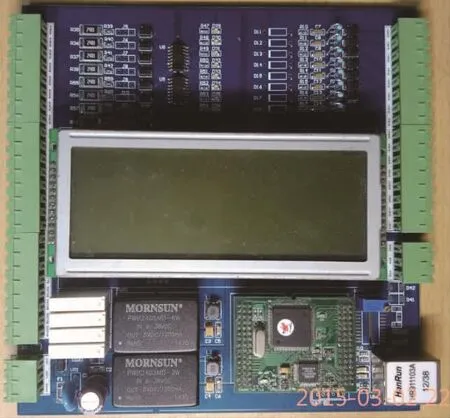
图10 RTU系统图Fig.10 RTU system
文中使用C++编写上位机测试软件,最后将RTU与电脑接入同一网络中并测试,上位机测试界面如图11所示。
由图11可以看出,在测试过程中,设置RTU的本地IP为132.120.137.10,上位机端口号为40000,然后在RTU的8路模拟的输入端口上共同串入了一路非标准的4 mA电流进行测量,最后将上位机的访问地址和端口号与RTU设置成一致。从上位机观察到的实验结果可看出,8路测量数据中最大为5.760 2 m3/h,最小为5.690 4 m3/h,换算成相应的电流值分别为4.092 mA和4.091 mA,达到了非常高的测量分辨率。

图11 上位机测试界面Fig.11 Testing interface of upper com puter
5 结 语
文中对所研发的RTU系统的硬件及软件的实现方法进行了论述,本着高性能、低功耗、低成本的理念去进行设计,采用多种隔离技术、防护措施,有效地保障系统安全可靠的运行。最后对设计出来的实物作品进行了EMC测试,电源也达到了典型B类产品要求,其他各项参数也均满足设计要求;同时通过实际的长时间正常运行,表明本系统的可行性。
[1]李滨,徐鸿德.上海市白龙港城市污水处理厂升级改造工程自控系统设计[J].中国给水排水,2011,27(6):66-69.
LIBin,XU Hongde.Design of automatic control system in upgrading reconstruction project of Shanghai Bailonggang sewage treatment plant[J].ChinaWater and Wastewater,2011,27(6):66-69.(in Chinese)
[2]张燕妮.ARM Cortex-M3嵌入式开发实例详解-基于NXP LPC17XX[M].北京:电子工业出版社,2013.
[3]肖前军.基于STM32和MODBUS协议的多参数数据采集卡设计[J].制造业自动化,2010,32(12):205-208.
XIAO Qianjun.Multi-parameter data acquisition card design based on STM32 and MODBUS protocol[J].Manufacturing Automation,2010,32(12):205-208.(in Chinese)
[4]李文新,慕德俊,雷志广.磁隔离技术在GPS信号模拟源设计中的应用[J].计算机技术与发展,2011,21(4):190-191.
LIWenxin,MU Dejun,LEIZhiguang.Application aboutmagnetic isolation technology on design of GPS signal simulation source [J].Computer Technology and Development,2011,21(4):190-191.(in Chinese)
[5]董丽凤,李艳丽,王吉源.CMOS集成电路闩锁效应抑制技术[J].电子与封装,2010,10(9):28-30.
DONG Lifeng,LI Yanli,WANG Jiyuan.Overview on the prevention of latch-up effect in CMOS IC[J].Electronics and Packaging,2010,10(9):28-30.(in Chinese)
[6]邵贝贝.嵌入式实时操作系统uC/OS-II[M].2版.北京:北京航空航天大学出版社,2007.
[7]钱乐秋,赵文耘,牛军钰.软件工程[M].北京:清华大学出版社,2007.
[8]林勇坚.ModBus/TCP工业以太网的计算机控制系统[J].通信技术,2008,41(10):207-209.
LIN Yongjian.ModBus/TCP computer control system based on industry internet[J].Communication Technology,2008,41(10): 207-209.(in Chinese)
(责任编辑:邢宝妹)
Shanghai Bailonggang Sewage Treatment Plant Design of Specific RTU
MEIHuiru, XUWeidong*, LIFuxiang, CHEN Huan
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
The design originates from the reconstruction of Shanghai Bailonggang sewage treatment plant.According to the requirements of the project,we put forward a design scheme of RTU dedicated to this project.The RTU utilizes a Cortex-M3 microprocessor as the core component in the hardware and includes a series of anti-interferencemeasures in order to ensure the system stability and high performance at a low cost.For the software,ModBus TCP/IP is employed as communication protocol.The upper computer obtains the field data through industrial ethernet to realize remote monitoring.This paper describes the principle of hardware design and software implementation about the RTU in detail, and gives the test results of the communication.
RTU,isolation,ModBus TCP/IP communication protocol,remotemonitoring
TP 216
A
1671-7147(2015)01-0069-06
2014-06-10;
2014-07-15。
梅会儒(1988—),男,湖北咸宁人,控制理论与控制工程专业硕士研究生。
*通信作者:许维东(1968—),女,河南开封人,讲师,硕士生导师。主要从事电力系统的非线性控制等研究。
Email:stxwfcwfd@163.com
猜你喜欢
装备制造技术(2020年1期)2020-12-25 05:18:20
铁道通信信号(2020年8期)2020-02-06 09:13:22
电子测试(2018年22期)2018-12-19 05:12:42
车迷(2018年12期)2018-07-26 00:42:22
电子制作(2017年24期)2017-02-02 07:14:44
中国老区建设(2016年3期)2017-01-15 13:53:26
山东工业技术(2016年15期)2016-12-01 05:31:14
电子制作(2016年23期)2016-05-17 03:53:43
电源技术(2015年7期)2015-08-22 08:48:48
学习月刊(2015年3期)2015-07-09 03:51:04