动态环境下改进五帧差分的运动目标检测新算法
2015-10-21 01:19:44陈志勇彭力张纪宽
服装学报 2015年1期
陈志勇, 彭力, 张纪宽
(江南大学物联网工程学院,江苏无锡214122)
动态环境下改进五帧差分的运动目标检测新算法
陈志勇, 彭力*, 张纪宽
(江南大学物联网工程学院,江苏无锡214122)
在噪声、光照变化和背景不断变换等动态环境下运动目标检测存在着误检、漏检现象。帧间差分法对动态环境有较强的适应性,但一般只能提取目标的轮廓,不能完全检测出目标,容易产生内容空洞和虚假边缘的现象。为此文中提出一种改进五帧差分法的运动目标检测新算法。该算法首先利用中值滤波对每一帧图像进行去噪处理,然后对去噪后的图像进行文中的五帧运算,最后通过新的动态阈值分割算法和数学形态学处理完成对运动目标的提取。实验结果表明,该算法的运算复杂度较低,可以检测动态环境下的运动目标,大大提高了运动目标检测的准确性。
五帧差分;中值滤波;动态阈值;运动目标检测
智能的视觉分析已经成为在智能环境、安全监控和人机交互方面的关键技术之一,检测运动目标是已较基础的技术[1]。针对视频图像的特殊性,常用于运动目标检测的方法[2]有光流法、帧间差分法、背景差分法等。光流法适合静态和动态背景,但由于其复杂的计算和较差抗噪声性能,需要特殊的硬件实时处理。背景差分法[3]算法简单,能够有效地提取出运动区域,但是场景变换比如树叶摇摆、光线改变,都会影响运动目标的提取。帧间差分法对于光线的变化、快速的背景更新有良好的自适应性能。
文中在较复杂的环境下以帧间差分法为基础,提出了一种改进的运动目标检测新算法,并提出一种新的动态阈值算法。实验结果表明,该算法有较低的运算复杂度,可以检测复杂环境下的运动目标,提高了运动目标检测的效率和准确性。
1 帧间差分法
帧间差分法[4](Frame difference)是运动目标检测领域常用的方法之一。它利用视频图像中相邻两帧图像的差异来进行运动目标检测,即对视频图像中时间上相邻的图像求绝对差,然后用一个阈值来判断是否存在运动物体。帧间差分法原理:假设视频图像中当前第k帧和第k-l帧图像各像素点的灰度值分别为Ik(i,j)和Ik-1(i,j),则它们的差分图像为

对上述得到的差分图像,通过设定阈值T来对图像中的各个像素点进行判断,从而提取出视频图像中的运动区域:

基于帧间差分法的运动目标检测方法抗干扰能力较强,对环境有较好的适应性。
五帧差分法[5]是在三帧差分法的基础上加以改进的,可以在一定程度上有效地克服三帧差分法的不足。设预处理后的5帧图像ft-2(x,y),ft-1(x, y),ft(x,y),ft+1(x,y),ft+2(x,y),其中ft(x,y)为中间帧,利用中间帧分别和前2帧和后2帧做差分运算,得到的差分结果为


然后将差分后的结果D13(x,y)和D35(x,y),D23(x, y)和D34(x,y)分别进行“与”运算:

“与”运算能够有效地克制或运算造成目标重叠现象。最后对D1和D2进行滤波处理,再用动态阈值二值化处理,将其结果进行“或”运算,能够有效地克制空洞现象,得到最终的目标轮廓[6]:

另外,还有一种方法是将差分结果求和再取平均值。当然,这种算法适合运动缓慢的目标,如果运动目标运动快很容易出现重叠、拖拽现象。
2 改进五帧差分法
2.1 中值滤波
在图像处理中,进行如边缘检测这样的进一步处理之前,通常需要首先进行一定程度的降噪。中值滤波[7]是图像处理中的一个常用步骤,它对于斑点噪声(Speck le noise)和椒盐噪声(Salt-andpepper noise)来说尤其有用。
文中在对图像进行差分之前,首先进行中值滤波,去除图像中的部分噪声,有利于下面对运动目标的提取。
2.2 改进的算法
算法以5帧差分为基础,利用中值滤波对图像进行去噪处理,再用改进的五帧差分法得到较为完整的运动目标轮廓,最后通过后期处理,提取完整、准确的运动目标区域。
算法的整体流程如图1所示。

图1 改进算法流程Fig.1 Flow chart of the im proved algorithm
简述整个算法流程。取出连续的5帧图像,分别进行中值滤波处理,以中间帧为基础分别和其他4帧图像进行差分运算。得到4个差分结果D13,D23, D34,D35,分两组分别进行取“与”、取“异或”操作。首先取“与”操作将同时存在的前景运动目标取出,“异或”操作将差分后各自的运动目标都取出,当然这个操作中会比原来存在较多的噪声,接着取“或”操作将相同的以及各自的运动像素合在一起,这时存在的前景运动目标像素是最多的,但是重影现象和噪声也增多。最后一步将生成的2帧取“与”操作,很好地改善重影和消除绝大部分的噪声,然后经过数学形态学处理获取最终的前景运动目标。
2.3 动态阈值
传统算法阈值T是固定值,且需人为设定,适应性较差,对光照变化的场景不太适用[8]。文中提出一种新的基于时间的动态阈值算法[2]。为了适应光线变化,在固定阈值Threshold的基础上增加一个动态值ΔT,ΔT由光线变化和时间来决定:

则动态阈值[9]:

其中ΔT反映了环境的整体变化情况。t(x,y)跟光线的变化有关。当光线变化很小时,t(x,y)取Threshold,这时相当于取开始采用的最佳固定阈值Threshold;当光线变化明显时,t(x,y)来自公式(12),其中FPS定义为帧率,此时t(x,y)的初始值为Threshold的二分之一。随着光线的变化强度增强,t(x,y)随着时间在不断减小,ΔT在逐渐增大,T也在不断增大,这样有效地抑制了光线整体变化带来的影响。
2.4 数学形态学
数学形态学是由一组形态学的代数运算子组成,它的基本运算为膨胀(或扩张)、腐蚀(或侵蚀)、开启和闭合。基于这些基本运算还可推导和组合成各种数学形态学实用算法,用它们可以进行图像形状和结构的分析及处理,包括图像分割、边缘检测、图像滤波、图像增强和恢复等[10-11]。
将膨胀运算和腐蚀运算进行简单组合,可以得到形态学中的开运算和闭运算。A用结构元素B的开运算定义为

A用结构元素B的闭运算定义为

开运算一般能平滑图像的轮廓,削弱狭窄的部分,去掉细长的突出、边缘毛刺和孤立半点,断开目标物之间黏连时使用。闭运算一般用来填充目标内的细小空洞和裂缝,连接断开的临近目标。
3 实验结果对比
3.1 实验结果
以Matlab7.0进行实验仿真,初始阈值Threshold=20,t(x,y)=10,FPS=30,为了验证算法的有效性,分别利用三帧差分法、五帧差分法,以及文中算法对一组光照改变后的AVI视频序列图像进行测试,其中对五帧差分法进行同样预处理,检测结果如图2所示。

图2 实验检测结果Fig.2 Experimental test results
文中采用的视频是在光线变化特别明显的情况下提取的运动目标,光照时强时弱,采用背景差分时出现大量噪声部分,周围环境变化较大。
由检测结果可以看出,三帧差分法和五帧差分法的检测结果无明显差别,都能检测出运动目标,然而轮廓都不连续。而改进的算法检测出的目标轮廓更接近目标本身,并且明显地解决了拖影和轮廓不很连续的现象,也消除了大部分空洞。运用新的动态阈值分割算法很好地适应了环境的变化,在光线变化明显的复杂条件下该算法的优越性尤为突出。
本实验取出差分结果采用“与”和“异或”再进行“或”逻辑操作,“与”操作取出差分中共同的运动目标,“异或”操作取出差分后遗漏的运动目标以及部分噪声,进行“或”操作来补全原来遗漏的运动像素,保留了更多目标信息,从而使检测结果更加准确。最后得出的2帧再进行“与”很好地减少了重叠部分,很大程度上改善了运动目标检测,检测结果准确、完整、目标轮廓清晰,能满足实时性检测的要求。
3.2 结果分析
以识别率DR和误检率FAR对上述算法的效率和准确度进行分析,计算方法如下:
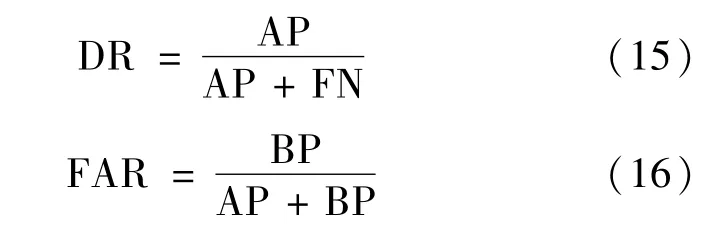
其中,AP为检测到与实际相符的运动目标数目;BP为误检出的非运动目标数目;FN为未检测出的目标数目。在同等条件下3种方法的比较结果如表1所示。
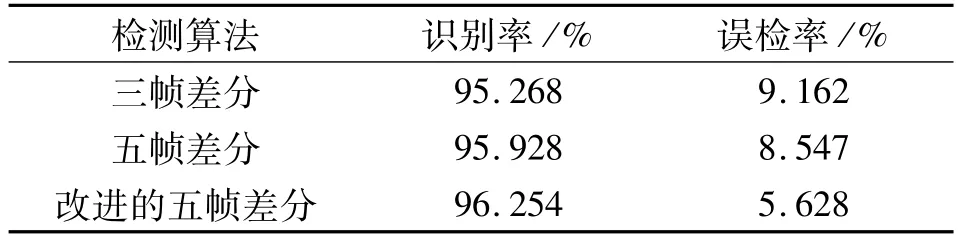
表1 算法的识别率与误检率Tab.1 Recognition rate and error detection rate
3种算法都能达到95%以上的识别率,能有效地检测出运动目标,而误检率变化较为明显,文中所用的算法在误检率上有明显改进,且检测结果准确、完整,目标轮廓清晰,满足实时性检测要求。
4 结 语
结合五帧差分法和中值滤波,提出了一种新的运动目标检测算法。首先对连续5帧图像通过中值滤波进行去噪处理,然后对5帧连续去完噪的图像进行新的五帧差分算法,最后通过二值化处理和数学形态学处理完成对运动目标的准确检测。实验结果表明,该算法能对运动目标准确提取,并且克服了传统帧间差分法目标轮廓不连续、空洞的缺陷,且计算简单,能够实时显示。
[1]Cheung SC S,Kamath C.Robust techniques for background subtraction in urban traffic video[J].Proceedings of SPIE,2004, 5308(1):881-892.
[2]YANG J B,SHIM,YI Q M.A new method for motion target detection by background subtraction and update[J].Physics Procedia,2012,33:1768-1775.
[3]Parks D H,Fels SS.Evaluation of background subtraction algorithmswith post-processing[C]//Fifth International Conference on Advanced Video and Signal Based Surveillance 2008.Santa Fe,NM:IEEE,2008:192-199.
[4]邬大鹏,程卫平,于盛林.基于帧间差分和运动估计的Camshift目标跟踪算法[J].光电工程,2010(1):55-60.
WU Dapeng,CHENG Weiping,YU Shenglin.Camshift object tracking algorithm based on inter-frame difference and motion prediction[J].Opto-Electronic Engineering,2010(1):55-60.(in Chinese)
[5]舒欣,李东新,薛东伟.5帧差分和边缘检测的运动目标检测[J].计算机系统应用,2014,23(1):124-127. ZHAO Gaochang,ZHANG Lei,WU Fengbo.Application of improved median filtering algorithm to image denoising[J].Journal of Applied Optics,2011,32(4):678-682.(in Chinese)
[6]贾伟,黄小天,谢椿,等.融合5帧差分与高斯模型的运动物料袋检测[J].电子技术应用,2013,39(10):139-142.
JIA Wei,HUANG Xiaotian,XIE Chun.Movingmaterial bag detectionmethod of a fused five frame difference and Gaussianmodel [J].Computer Technology and Its Applications,2013,39(10):139-142.(in Chinese)
[7]赵高长,张磊,武风波.改进的中值滤波算法在图像去噪中的应用[J].应用光学,2011,32(4):678-682. SHU Xin,LIDongxing,XUE Dongwei.Five frame difference and edge detection ofmoving target detection[J].Computer System and Application,2014,23(1):124-127.(in Chinese)
[8]陈凤东,洪炳镕.基于动态阈值背景差分算法的目标检测方法[J].哈尔滨工业大学学报,2005,37(7):883-884.
CHEN Fengdong,HONG Bingrong.Object detectingmethod based on background image difference using dynamic threshold[J]. Journal of Harbin Institute of Technology,2005,37(7):883-884.(in Chinese)
[9]郝毫刚,陈家琪.基于5帧差分和背景差分的运动目标检测算法[J].计算机工程,2012,38(4):146-148.
HAO Haogang,CHEN Jiaqi.Moving object detection algorithm based on five frame difference and background difference[J]. Computer Engineering,2012,38(4):146-148.(in Chinese)
[10]Kim K,Chalidabhongse TH,Harwood D,et al.Real-time foreground-background segmentation using codebook model[J].Real-Time Imaging,2005,11:172-185.
[11]TIAN Y L,LU M,Hampapur A.Robust and efficient foreground analysis for real-time video surveillance[C]//IEEE Computer Society Conference on.Yorktown Height,NY:IEEE,2005,1:1182-1187.
(责任编辑:杨 勇)
New M oving Ob ject Detection A lgorithm Based on the Im ported Five Fram e Difference Under the Dynam ic Environm ent
CHEN Zhiyong, PENG Li*, ZHANG Jikuan
(School of Internet of Things Engineering,Jiangnan University,Wuxi214122,China)
The moving-objective detecting algorithm always detects incorrectly in complicated environment,which contains noise illumination change and background disturbance.The interframe differencemethod is one of the basic method in the moving target detection in dynamic environment.The interframe difference method to the dynamic environment has strong adaptability,but can’t detect the targets,and is prone to the edge of the hole and false phenomenon.In this paper,a new method by using five frame differences is proposed for motion targer detection.The median filter is used to deal with the noise of a frame image,then the screen image is denoised after five frames arithmetic,by dynamic threshold segmentation andmathematicalmorphology,the processing is completed to extract the moving object.The experimental results show that the algorithm has low computational complexity,and can detect moving targets in a complicated environment,greatly improve the efficiency of the moving target detection and accuracy.
five frame difference,median filtering,dynamic threshold,moving target detection
*通信作者:彭 力(1967—),男,河北唐山人,教授,博士生导师。主要从事视觉传感器网络、人工智能、计算机仿真等研究。Email:pengli@jiangnan.edu.cn
TP 391.41
A
1671-7147(2015)01-0034-04
2014-08-10;
2014-09-02。
江苏省产学研联合创新项目(BY2013015-33,BY2014024,BY2014023-362014,BY2014023-257)。
陈志勇(1990—),男,江苏盐城人,控制工程专业硕士研究生。
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16 05:32:58
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
信息安全研究(2015年3期)2015-02-28 20:17:57
物探化探计算技术(2015年2期)2015-02-28 17:42:47
太空探索(2014年1期)2014-07-10 13:41:50
振动工程学报(2014年2期)2014-03-01 01:15:10
四川生理科学杂志(2014年2期)2014-02-28 14:09:20
电子设计工程(2014年20期)2014-02-27 12:01:00