基于电感数字转换器的金属探测小车设计
2015-10-21 00:16:02柳文强谢景卫大连大学信息工程学院辽宁大连66大连大学素质教育基地辽宁大连66
网络安全与数据管理 2015年20期
柳文强,谢景卫(.大连大学 信息工程学院,辽宁 大连 66;.大连大学 素质教育基地,辽宁 大连 66)
基于电感数字转换器的金属探测小车设计
柳文强1,谢景卫2
(1.大连大学 信息工程学院,辽宁 大连 116622;2.大连大学 素质教育基地,辽宁 大连 116622)
利用LDC1000电感数字转换器设计了一个金属探测小车。小车以MC9S12XS128单片机为控制核心,控制装有LDC1000电感传感器的摆臂左右摆动,进行金属探测。控制策略为先粗略扫描再精确定位,能在500mm×500mm的测试区域内探测到探头下方一定距离内的特定金属,并分辨出金属的不同特性。该金属探测小车探测精度高,测量信息准确、稳定,而且成本低,能适应多种恶劣环境,在军事领域、工业领域和安全领域都有很好的应用前景。
LDC1000;MC9S12XS128;金属探测;电感数字转换器
0 引言
金属探测器是利用金属传感器实现的能在一定范围内探测到是否有金属物体并能对金属物体进行定位的仪器。由于采用非接触式的感测技术,使得金属探测器在军事、工业和安全等领域都有着广泛的应用,如地雷探测、食品质量检测、地铁安检等,也可用于农村乡镇企业中化工、橡胶、制塑、食品加工、采矿、采煤等行业,还可应用于食品、药品、玩具等领域[1]。目前,市场上大多数金属探测器还是采用体积庞大、价格昂贵的电磁式金属传感器。相比之下,电感式数字金属传感器体积更小,价格更低,测量数据也更精确。
1 探测原理
1.1 LDC1000电感数字转换器简介
LDC1000是美国德州仪器(TI)公司研发的世界上首例实现了电感式感测的电感到数字化的转换器。它通过以较低的系统成本提供优于现有解决方案的性能、可靠性和灵活性,彻底地变革了感测技术。LDC1000提供了16位的谐振阻抗和24位的电感值,从而可在位置感测应用中实现亚微米级的分辨率。另外,电感式感测还可耐受诸如污垢和灰尘等非导电干扰,并且支持布设远程传感器,从而使其非常适合于严酷环境[2]。而且,此款电感传感器体积非常小,使其能够安装在微型设备上成为可能;同时,更小的体积给设计者保留了更充足的设计空间,应用范围也更加广泛。
1.2 LDC1000电感感测原理
LDC1000电感感测探头为一个自制线圈,在线圈中加上一个交变电流,线圈周围会产生交变电磁场,如果有金属物体进入这个磁场时,就会在金属物体表面产生感应电流,如图1所示。感应电流与线圈电流方向相反,感应电流产生的感应磁场与线圈的磁场方向相反。而感应电流的大小与金属物体的大小、成分、金属物体与线圈的距离相关。
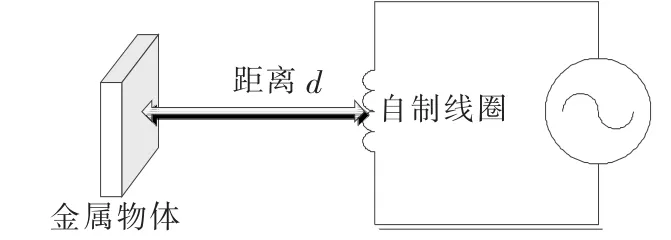
图1 线圈的电磁感应
如图2所示,由于金属物体与自制线圈的互感作用,在自制线圈这一侧就可以检测到金属物体的参数。图中Ls是自制线圈电感值,Rs是自制线圈的寄生电阻;L(d)是互感值,R(d)是互感寄生电阻,L(d)和R(d)都是距离d的函数。交变电流如果只加在电感(自制线圈)上,则在产生交变磁场的同时也会消耗大量的能量。这时将一个电容并联在电感上,由于LC的并联谐振作用,能量损耗大大减少,只会损耗在Rs和R(d)上,只要检测到R(d)的损耗就可以间接地检测到距离d。
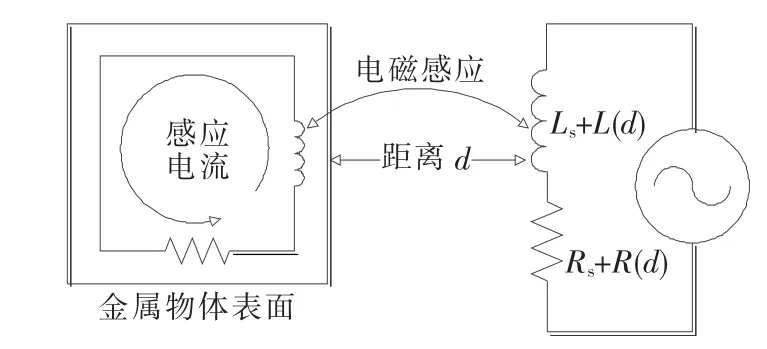
图2 互感
LDC1000并不是直接检测串联的电阻,而是检测等效并联电阻。等效并联电阻的计算公式为:

图3为实测结果,测试点在线圈的两级,利用差分探头可以在示波器上直接看到波形。可以看出,实测波形是正弦波,正弦波的频率是谐振频率。金属远离线圈时,由于没有感应电流的反向磁场,线圈的电感最大,谐振频率最低(2.71MHz),如图3(a)所示。当金属物体靠近时,由于感应电流产生的反向磁场,使线圈的等效电感下降,谐振频率就会提高(3.01MHz),如图3(b)所示。谐振LC中的电容C是已知的,所以根据谐振频率就能计算出电感L值。根据衰减震荡的曲线可以计算出并联等效电阻Rp。

图3 实测结果
2 总体设计
2.1 机械结构
为了让金属探测小车结构更简单而又转向灵活,小车采用双驱动轮加一个万向轮的两驱三轮车体结构。两个驱动轮分别用单独的电机来驱动,第三个轮起支撑作用。这种结构可以使小车在较短的时间内到达任意位置和角度。
为了使小车在同一位置扫描更大的区域,小车的前方装有能左右旋转180°的数字舵机,舵盘上固定着长为300mm的摆臂,摆臂的末端固定着LDC1000传感器。这样就可以让小车更快速地完成探测任务,也为后来的控制算法提供了有力的保障。小车的机械结构如图4所示。
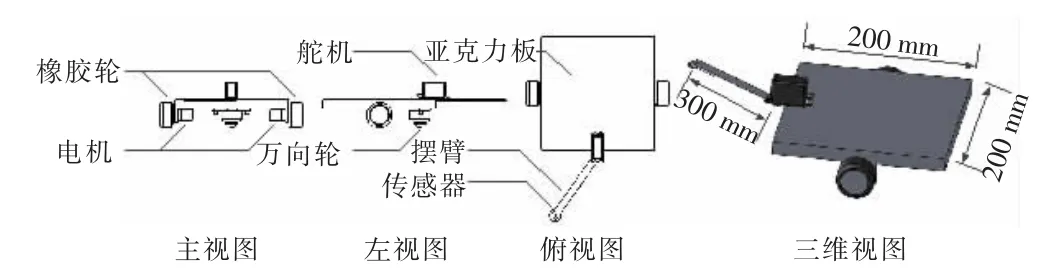
图4 小车的机械结构
2.2 系统结构
金属探测小车以飞思卡尔(Freescale)半导体公司的MC9S12XS128MAA单片机为主控芯片,该芯片由16位中央处理单元(CPU12X)、128KB程序Flash、8KB RAM、8KB数据Flash组成片内存储器,而且还集成了串行通信接口(SCI)、串行外设接口(SPI)、定时器模块(TIM)和脉冲调制模块(PWM)等丰富的片上资源[3]。小车用单片机内的SPI模块与LDC1000进行通信,将传感器采集到的数据读取到单片机中,对数据进行分析后,通过PWM模块控制舵机转动,进行下一个位置点的探测。当舵机转到最小角度或最大角度时,同时控制电机使小车向前运动一小段距离,然后舵机以反方向继续转动。如此往复,直到探测到目标金属物体,蜂鸣器发出提示音为止。系统功能图如图5所示。
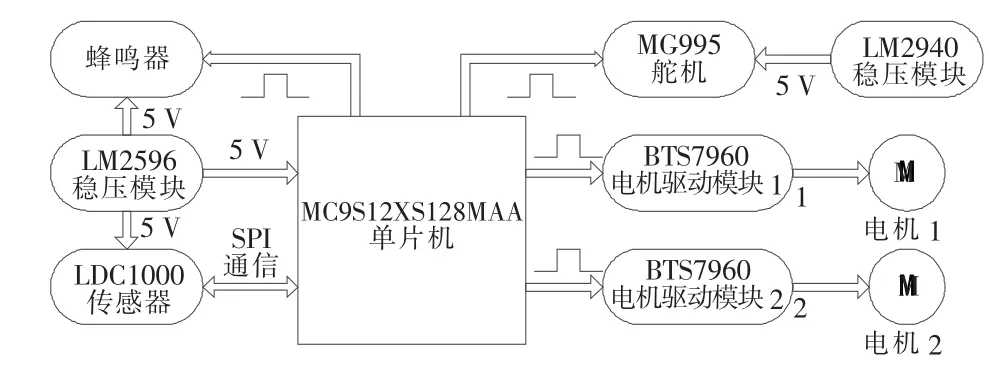
图5 系统功能图
2.3 控制算法
控制算法是整个系统的核心。一个好的控制算法不仅能够保证系统稳定工作,还能尽可能地提高金属探测的精度。本金属探测小车的控制算法总体思想为:先找到大概位置,再精确定位。
金属探测小车以20ms为一个控制周期,即每20ms读一次传感器数据,然后根据读取的数据做出相应的输出。刚开始探测时,小车把摆臂转到最左边。此后,在每个控制周期内,单片机从金属传感器读取一次谐振阻抗数据(以下简称数据),并将此数据及对应的舵机打角记录下来,然后,摆臂向右转动大约1°,等待进入到下一个控制周期。当摆动到最右端时,小车向前移动大约5mm,然后读取传感器数据,记录数据及对应的舵机打角,摆臂向左转动大约1°,等待进入到下一个控制周期。如此往复,直到读取回来的数据出现大幅度波动,这时就可以推断出传感器附近有金属物体了。此时,让金属探测小车继续扫描,直到数据幅值出现下降趋势。再通过查找记录下来的数据,找到幅值最大时的小车位置及舵机打角,并将舵机转动到相应的打角,然后进入精确定位阶段。
在精确定位阶段,金属探测小车还是以20ms作为一个控制周期。先让舵机保持之前数据幅值最大时对应的打角,然后在每个控制周期内向后以1mm的间距移动小车,并读取谐振阻抗数据,直到数据出现下降后停止向后移动。此时,舵机每个控制周期向右转动大约0.2°,并记录下传感器数据,直到数据大小开始下降,然后,舵机每个控制周期向左转动大约0.2°,直到数据大小开始下降。
经过一系列的实验与测试,得到了探测器探头与硬币中心之间的距离和谐振阻抗数据的关系,如图6所示,测试所用的硬币分别为一角硬币(2005年版,不锈钢,直径为19mm)和一元硬币(1999年版,钢芯镀镍,直径为25mm)。根据数据的幅值大小即可判断硬币种类。至此,金属探测任务已经完成,金属探测小车发出“滴滴滴”的提示音。

图6 硬币距探测器距离和传感器数据关系图
3 实际测试
3.1 测试方式
分别将一角硬币和一元硬币放在大小为500mm×500mm的测试区域内的任一位置,测试区域上方覆盖一层厚度为3mm的有机玻璃,将小车放在测试区域外,并将小车的方向朝向测试区。如图7所示,打开小车电源开关,小车开始金属探测。记录探测完成所需时间(探测用时)及探头中心与硬币圆心之间的距离(探测误差)。
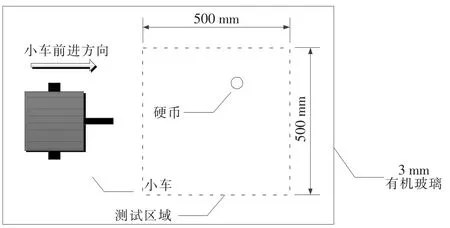
图7 测试方法
3.2 测试结果
将金属探测小车按照上述方法进行实际测试,经过5组测试后,将测试结果制成表格,如表1所示。根据测试数据可以看出,小车能够在 2min内完成探测任务,并且能将探测误差控制在5mm以内。
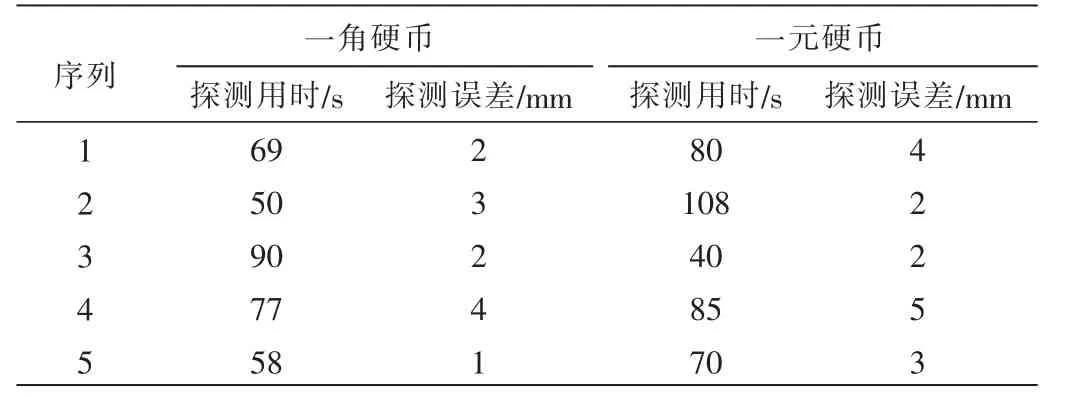
表1 测试结果
4 结论
本金属探测小车能够在2min之内探测到500mm×500mm测试区域内任意位置上的硬币,并能将探测误差控制在5mm以内,而且能够分辨出硬币类别。快速、精确是本金属探测小车的特性,但由于电机齿轮、舵机齿轮有少许的空程,使之与理论上的控制精度有一些差别。如果小车使用更精密的电机和舵机,将会进一步减小探测误差,使金属探测小车更加完美。
[1]杨勇,曲晓东,刘志珍,等.一种改进的高灵敏度金属检测系统[J].微型机与应用,2014,33(17):23-25.
[2]单祥茹.TI首创电感数字转换器满足多领域应用 [J].中国电子商情(基础电子),2013(10):28.
[3]张阳,吴晔,腾勤.MC9S12XS单片机原理及嵌入式系统开发[M].北京:电子工业出版社,2011.
Design of metal detecting car based on inductive digital converter
Liu Wenqiang1,Xie Jingwei2
(1.College of Information Engineering,Dalian University,Dalian 116622,China;2.Quality Education Base,Dalian University,Dalian 116622,China)
This paper designed a metal detector car with the inductance-to-digital converter of LDC1000.The car′s MCU is MC9S12XS128,controlling the swinging arm with inductance-to-digital converter of LDC1000 to around side to side to detect metal. The Strategy is accurate positioning control after a rough scan.It can detect certain metals within a certain distance in the region of 500 mm×500 mm,and distinguish different properties of metals.This car has high metal detection precision and accurate measurement information.It is stable and low cost,and can adapt to a variety of harsh environments,and in the field of military industry has very good prospects and security areas.
LDC1000;MC9S12XS128;metal detector;inductive digital converter
TP23
A
1674-7720(2015)20-0090-03
柳文强,谢景卫.基于电感数字转换器的金属探测小车设计[J].微型机与应用,2015,34(20):90-92.
2015-05-27)
柳文强(1995-),男,本科,主要研究方向:计算机控制。
谢景卫(1980-),通信作者,男,工程硕士,实验师,主要研究方向:计算机技术应用。E-mail:21115098@qq.com。
猜你喜欢
成都信息工程大学学报(2020年5期)2020-07-29 08:50:12
自动化学报(2019年6期)2019-07-23 01:18:36
中学生数理化·八年级物理人教版(2018年5期)2018-06-21 08:01:38
电子制作(2018年1期)2018-04-04 01:48:14
创新作文(小学版)(2018年16期)2018-01-26 02:41:29
制造业自动化(2017年2期)2017-03-20 14:26:08
西南交通大学学报(2016年3期)2016-06-15 20:29:35
通信电源技术(2016年4期)2016-04-04 02:57:38
舰船科学技术(2015年8期)2015-02-27 15:38:46
小说月刊(2014年10期)2014-04-23 08:53:53