
GSM-R光纤分布式系统的时延测量与自动补偿
2015-10-21 00:15丁伟伟同济大学电子与信息工程学院上海201804
网络安全与数据管理 2015年20期
丁伟伟,赵 霞(同济大学 电子与信息工程学院,上海 201804)
GSM-R光纤分布式系统的时延测量与自动补偿
丁伟伟,赵 霞
(同济大学 电子与信息工程学院,上海 201804)
针对GSM-R光纤分布式系统在无线信号覆盖时存在的同频信号干扰问题,设计了基于VxWorks嵌入式操作系统的信号时延测量和自动补偿方法。首先介绍了系统时延测量的基本原理并给出了计算公式,然后利用VxWorks中任务管理和信号量传递机制完成了系统时延测量和自动补偿设计,最终确保系统在自动时延补偿后可降低同频信号干扰的影响,提高无线通信的质量。实验结果表明,该设计可将系统时延差值补偿至1μs以内,满足实际应用的要求。
光纤分布式系统;光纤时延;转发时延;自动补偿;VxWorks
0 引言
近年来,铁路交通不断发展,铁路沿线地形也随之变得复杂,大弯道、深路堑、长隧道等区域通常是基站天线覆盖的弱场区。在这些区域建设基站,无论在成本控制还是基站选址上都有很大难度,而GSM-R光纤分布式系统可以有效地填补基站的覆盖盲区,节省基站建设开支,提高铁路通信的服务质量,因此采用光纤分布式系统结合天线或漏泄电缆的方式来解决复杂地形的信号覆盖问题。基于上述优点,光纤分布式系统近几年来得到了很好的发展和应用[1]。
1 系统概述
本文所述光纤分布式系统由一台时分主单元(Time Distributed MasterUnit,TDMU)与多台射频拉远单元(Remote Radio-frequency Unit,RRU)组成,其中TDMU与基站连接,用于将基站射频信号进行数字化后,通过光纤传输到远端机RRU进行射频覆盖,同时对基站射频信号进行时延处理。一种常见的拓扑连接如图1所示,一台TDMU最多可挂载4台RRU,同时每台RRU又可级联一台RRU实现信号的多级传输。

图1 一种常见拓扑连接图
1.1 工作原理
上行链路中,TDMU与RRU上行天线分别接收来自列车移动台(Mobile Station,MS)的无线信号,经射频放大、混频处理后,再由模数转换器采样变成数字中频信号,之后经过数字处理单元完成数字下变频,其中RRU通过光纤将收到的上行数据传输至上级设备,TDMU收到来自光口的上行数据,由数字处理单元处理后经数模转换器转换成模拟信号,再经过上变频、射频放大后通过天线发送至基站(Base Station,BS)。下行链路中,TDMU下行天线接收来自BS的无线信号,经过与上行链路类似处理后通过光纤将下行数据传输至各级RRU,并通过TDMU与RRU的下行天线将信号发送至MS。
1.2 同频干扰
在移动通信中,一个不可忽视的问题就是同频干扰。同频干扰是指在同一制式下不同信号发射源(基站、直放站等)同一频点的下行信号在同一小区出现,使MS无法区分不同的信号源,形成干扰。参考文献[2]、[3]分析了同频干扰产生的原因以及对无线通信的影响,当同频干扰产生后,如果不处理好,就会造成通信质量下降,严重的可能造成掉话和数据丢失等问题。在同一小区引入光纤分布式系统后,直接增加了同频干扰区域,即在TDMU与RRU之间、RRU与RRU之间都会形成一个同频叠加区。参考文献[1]针对这一问题提出通过增大单个RRU到TDMU的传输时延,使距基站较近的RRU与距基站较远的RRU时延一致,以降低同频干扰的影响。参考文献[4]、[5]针对数字光纤直放站提出了光纤时延与转发时延的概念,介绍了时延测量原理并给出了时延校正的公式,但并未进行验证。本文在此基础上提出一种基于软件实现的时延测量与自动补偿的方案以降低同频干扰的影响,并给出了实际测试结果。
2 时延测量与计算
2.1 系统时延值定义
图2为光纤分布式系统的连接结构图(以TDMU主口1连接2个RRU为例,图中箭头表示数据传输方向)。

图2 系统连接简图
设m为TDMU的主口(m=1,2,3,4),i为级联 RRU的级数(i≥1,i=0时表示TDMU),系统各时延值定义如下[2]:



2.2 时延测量
2.2.1 光纤时延值

由于各级设备的参考时钟频率相同,且光纤双向传输长度相同,则:

由式(1)和式(2)可得:


2.2.2 转发时延值
由于在下行链路中,数据直接通过数字处理单元进行端口透传,下行转发时延理论上是一个数值很小的定值,且其值不随光纤长度、级联设备数量而改变,为简化测量过程,本设计中忽略下行转发时延。上行链路中,数字处理单元需对各级远端设备的上行数据进行加和处理,因此上行转发时延与光纤长度、远端设备数量都有关系。在测量上行转发时延时,首先将本级设备接收到的所有上行数据进行整合,此处数字处理单元的读写速率同频,所以测量写动作和读动作之间的时间差值即为本级RRU的上行转发时延。
2.3 补偿计算
下行链路时延补偿的原则是使基站输出的无线信号经过光纤传输后同时到达TDMU及各个RRU的射频口发射。而上行链路中,各级RRU在收到下一级RRU发送过来的IQ数据后都要与本级射频口接收的数据进行加和再发送至上一级,上行链路时延补偿的原则是使各级RRU在同一时刻接收的数据同时到达基站。根据上下行链路时延补偿的原则,计算时延补偿值首先应分别找到上下行链路的最大时延。

此时,TDMU的上下行时延补偿值就是 TUmax和 TDmax。TDMU具有多条链路时,第j条链路第i级RRU的上下行时延补偿值计算公式为:
3 时延自动补偿
本设计的目的在于实现上下行链路时延的自动补偿,即在系统组网完成、拓扑结构发生改变等情况下,系统能够检测到这些变化,并重新测量时延进行计算和补偿。
3.1 软件实现
基于上述分析以及2.3小节的补偿计算方法,本文提出一种基于VxWorks嵌入式实时操作系统[6]的时延自动补偿实现方案。
测量及补偿的基本步骤如下:
(1)系统上电初始化完成后,TDMU的控制单元向各条链路中的RRU下发拓扑控制信息以获得系统当前的拓扑状态,并在程序中建立多条链表以保存当前的拓扑信息;
(2)通过遍历各条链表实现对系统中各个RRU的光纤时延和转发时延的测量,并将所测得的时延值保存在链表对应的节点信息中;
(3)根据链表的各个节点信息及式(5)~(8)计算系统上下行最大时延值,然后根据式(9)和(10)计算每个RRU的上下行时延补偿值并保存在各个节点中,之后再次遍历各条链表将补偿值下发至RRU完成时延补偿。
链表中各节点结构体定义如下:

当系统完成初始化组网、拓扑连接状态发生变化或更换光纤时,系统需要重新对当前拓扑状态下的RRU进行时延测量和补偿,要实现这一功能,需要利用Vx-Works系统中的任务管理和任务间通信机制[6]:系统初始化时,通过调用taskSpawn()创建两个任务:设备管理任务DevManTask()和时延任务DelayTask(),其中设备管理任务用来实时监控系统的拓扑状态,时延任务用于完成系统的时延测量及补偿,并设置信号量semStart用以在两个任务间传递信息。一般情况下,时延任务处于阻塞状态。打开自动时延补偿使能开关后,当拓扑发生变化时,TDMU会检测到端口光纤变化或收到发生变化的光纤前一级RRU的信息上报,此时,设备管理任务向时延任务释放信号量semStart,时延任务得到该信号量后进入就绪状态,之后,再根据时延测量及补偿的基本步骤完成系统的时延补偿。
设计中,为满足应用方根据参考文献[7]提出的最大时延要求,即信号在接收端产生的时延扩展,其时延差≤1μs,TDMU与RRU上的数字处理单元均采用主频为122.88MHz的数字处理芯片,其时延测量精度为1/122.88MHz≈8.138ns,理论上满足应用要求。
3.2 实验验证
如图3所示,实验平台基于GSM-R光纤分布式系统,包括一台TDMU、两台RRU,实验仪表包括罗德施瓦茨公司的SMBV100A矢量信号源、FSU系列多功能频谱分析仪,其他实验器材包括计算机一台,网线一根,3km光纤、6km光纤各一匝,射频导线及转接头若干,光模块若干等。

图3 测试平台示意图
实验过程如下:将TDMU与RRU分别按照星型组网(如图4(a)所示)和链型组网(如图4(b)所示)连接。测量下行时延时,将信号源接入TDMU下行接收天线口,将频谱仪分别接入TDMU和各RRU下行发射天线口,通过控制台监控软件操作自动延时补偿开关,利用频谱仪分别测量各个设备在自动补偿前和自动补偿后的下行链路时延并记录;测量上行时延时,其过程与下行类似,不同的是此时信号源分别接入TDMU和各RRU的上行天线接收口,频谱仪接入TDMU上行发射天线口分别测量各个设备上行链路时延。

图4 组网示意图
星型组网下,测量结果如表1所示。

表1 星型组网测试结果
链型组网下,测量结果如表2所示。

表1 基本PSO所得统计数据
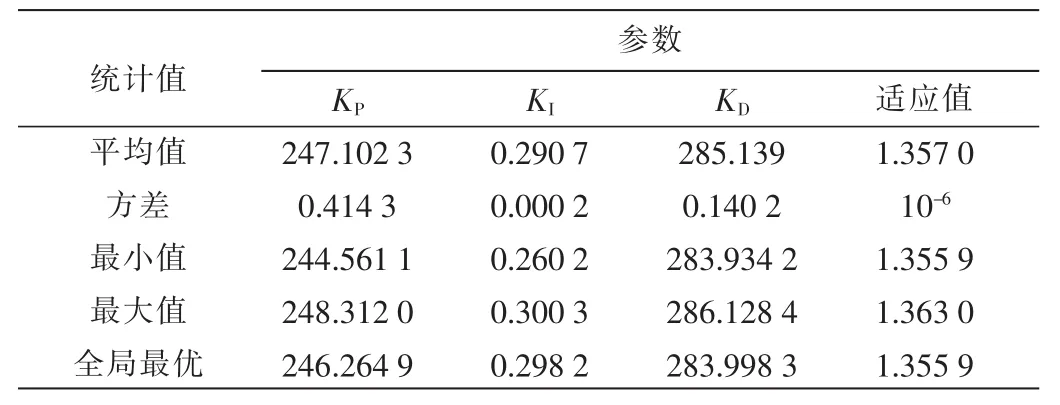
表2 改进量子PSO所得统计数据

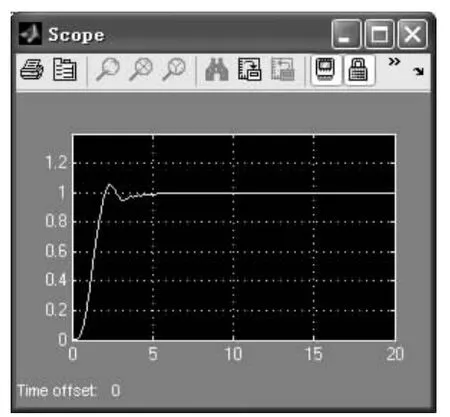
图2 基本PSO对应响应曲线
[1]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2003.
[2]安凤栓,常俊林,苏丕朝,等.基于改进粒子群优化算法的PID控制器参数优化[J].工矿自动化,2010(5):54-57.
[3]朱颖合,薛凌云,黄伟.基于自组织调整因子的模糊 PID控制器设计[J].系统仿真学报,2011,23(12):2732-2737.
[4]杜海树,杨智,邱熔胜,等.神经智能PID控制算法应用[J].甘肃工业大学学报,1999,25(3):72-76.
[5]周洪波,齐占庆,衡强,等.一种改进的遗传算法及其在PID控制中的应用[J].控制工程,2007,14(6):589-591.
[6]王介生,王金城,王伟.基于粒子群算法的PID参数自整定[J].控制与决策,2005,20(1):73-76.
[7]孙慧,杨守义,穆晓敏.NC-OFDM系统导频设计的离散粒子群算法[J].电子技术应用,2014,40(7):99-102.
[8]孙俊.量子行为粒子群优化算法研究[D].无锡:江南大学,2009.
[9]KENNEDY J,EBERHART R.Particle swarm optimization[C]. Proceedings of the 1995 IEEE International Conference on Neural Networks,1995:1942-1948.
The delay measurement and auto compensation of GSM-R fiber distributed system
Ding Weiwei,Zhao Xia
(School of Eletronic and Information Engineering,Tongji University,Shanghai 201804,China)
Aiming at same frequency disturbance problem in global system of mobile communication for railways(GSM-R)fiber distributed system when wireless signal covering,this paper designs a method of delay measurement and autocompensation based on VxWorks system.Firstly,it introduces fundamental of system delay measurement and calculating formulas.Then it finishes the design of delay measurement and auto compensation using mechanism of task management and semaphore.The purpose of design is to reduce the interference of same frequency and improve the quality of wireless communication finally.The experimental results indicate that this design may reduce the difference value of delay to 1 μs,and satisfies the need of actual application.
fiber distributed system;fiber delay;forwarding delay;auto compensation;VxWorks
TN913.7;TP29
A
1674-7720(2015)20-0072-04
丁伟伟,赵霞.GSM-R光纤分布式系统的时延测量与自动补偿[J].微型机与应用,2015,34(20):72-75,79.
2015-06-22)
乔占周(1979-),男,硕士,讲师,主要研究方向:智能优化与控制。
猜你喜欢
汽车工程师(2021年12期)2022-01-17
移动通信(2021年5期)2021-10-25
军民两用技术与产品(2021年12期)2021-03-09
空间科学学报(2020年3期)2020-07-24
电子制作(2019年23期)2019-02-23
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
现代防御技术(2016年1期)2016-06-01
腹腔镜外科杂志(2016年9期)2016-06-01
电测与仪表(2016年17期)2016-04-11
