基于卷积神经网络的空中目标战术机动模式分类器设计*
2015-10-19 10:02郑昌艳军械工程学院河北石家庄050003
网络安全与数据管理 2015年22期
郑昌艳,梅 卫(军械工程学院,河北 石家庄 050003)
基于卷积神经网络的空中目标战术机动模式分类器设计*
郑昌艳,梅 卫
(军械工程学院,河北 石家庄 050003)
针对现有空中目标机动模式识别算法鲁棒性和抗噪性差的问题,提出了利用卷积神经网络直接对航迹数据进行非人工特征提取,从而实现机动模式识别的算法。针对目标机动段难以分割的现实情况,提出了滑动时间窗口的模式识别方法,并给出了基于滑动时间窗口的机动模式识别流程。对空中目标进行了航迹仿真,并进行了数据预处理,为卷积神经网络提供了合理训练样本。通过仿真实验确定了适合于机动模式识别的卷积神经网络的结构和参数,实验结果表明,构造好的卷积网络对机动模式的识别率达98.4%,并且在结合机动触发点后,对连续航迹的识别取得了良好效果。
机动模式识别;卷积神经网络;滑动时间窗口;航迹仿真;数据预处理
0 引言
随着高新技术的快速发展,空中作战目标机动性能得到了大幅提高,更大规模的多飞行器协同作战,使得空中的情报信息呈现爆炸式增长,这不仅对指挥员的判断与决策造成了很大困难,也使防空武器系统面临着巨大的威胁。利用空中战场态势估计来辅助智能化决策[1]是处理空中复杂情报信息的重要研究内容,而空中目标战术机动模式识别是实现空中战场态势估计的重要环节。
目前均是人工提取机动模式的几何或运动参量特征来进行机动模式的分类。由于目标机动性能、飞行人员操作水平的不同、探测器精度的影响及自然条件因素的变换,同一种机动模式数据有着复杂的变化。人工提取的特征分类往往有很强的局限性,只适合较为特殊的情况,鲁棒性和抗噪性能较差。
神经网络模型有着强大的非线性映射能力,是实现分类、预测任务的一种重要模型[2]。卷积神经网络能够通过训练,实现对数据的非人工特征提取,这种非人工提取的特征在很多应用上取得了比人工提取的特征更好的效果。本文利用卷积神经网络的这一优点,设计了基于卷积神经网络的机动模式分类器,实现了对空中目标战术机动模式的特征提取和分类工作。
1 滑动时间窗口的目标机动模式识别方法
1.1 目标典型机动模式
本文主要针对的空中目标是作战飞机和巡航导弹。
不考虑作战飞机在近距离博弈时的格斗动作,其典型的机动类型包括直线、圆弧转弯、盘旋、爬高、俯冲、蛇形机动等[3-4];巡航导弹一般是根据目标位置事先设定了飞行航路,其动作类型较为单一,主要为直线运动,在进入攻击段时会进行蛇形机动来规避炮火袭击,之后再进行跃升俯冲对目标实施打击[5]。图1为典型的巡航导弹攻击航路。
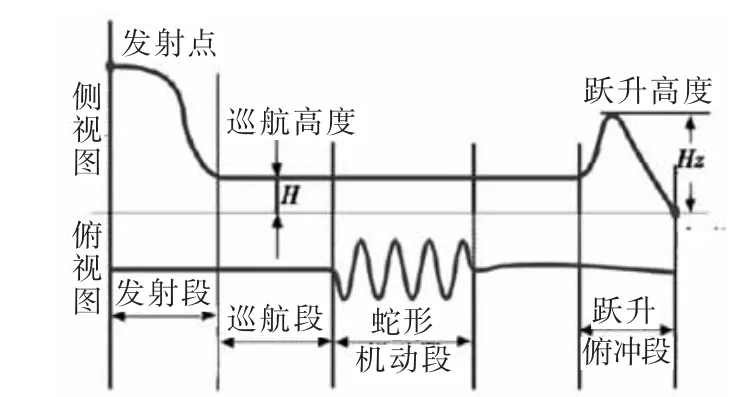
图1 典型巡航导弹攻击航路
1.2 滑动时间窗口的机动模式识别方法
机动段的分割在现实中很难实现,这是机动模式识别存在的一大难题。机动模式识别存在的另一个问题是,由于各种机动模式特征的不同,往往不知道该组合哪些特征来实现对多机动模式的识别。
针对这些问题,本文提出了滑动时间窗口的机动模式识别方法。该方法先利用拐点检测法检测出机动“触发点”,在得到机动“触发点”后,对目标航迹按照一定的时间窗口进行划分,滑动窗口不停地进行机动模式识别;定义一些机动模式为退出机动模式,在识别到该种模式后即停止进行模式识别,重新开始寻找机动“触发点”进行下一轮的机动模式识别。整个识别流程如图2所示。

图2 滑动时间窗口的机动模式识别流程图
2 基于卷积神经网络的机动模式分类器设计
图2所示的识别流程中,是利用已经训练好的分类器进行时间窗口内的机动模式识别,本节主要探讨5 s时间窗口内的机动模式分类器是如何设计和训练的。
目标因为过载承受能力等限制,在5 s的时间内无法完成盘旋机动,所以5 s的时间窗口中可能出现直线、蛇形机动、圆弧转弯、圆弧直线过渡段、跃升、俯冲、跃升俯冲过渡段这7种机动类型,设计的分类器即要能够实现对这7种机动模式的分类。
2.1 卷积神经网络简介
2.1.1 卷积神经网络的网络结构[6-7]
卷积神经网络是一个多层神经网络,每层由多个二维平面组成,每个平面由多个独立神经元组成。图3为典型的卷积神经网络结构图。输入层经过多个卷积核卷积后得到多个特征图组成的卷积层C1,每个特征图再经过池化,得到池化层S2。后面两层依此类推,最终将得到的输出光栅化,连成一个列向量后输入到传统的神经网络。

图3 典型的卷积神经网络结构图
2.1.2 卷积层
卷积层利用局部连接和权值共享,减少网络自由参数个数,降低网络参数选取复杂度。在一个卷积层中,用一个可学习的卷积核与上一层若干个特征图进行卷积,再通过一个激活函数 f(如Sigmoid函数等),利用式(1)就可以得到相应的输出特征[6]。

其中,l表示层数,k是卷积核,*表示二维卷积,b是偏置,Mj为输入特征图集合。
2.1.3 池化层
下采样层利用相邻数据相关性原理进行子抽样,在减少数据处理量的同时保留有用信息。通常是对前一层对应的特征图中向量特征进行池化操作。池化分为平均池化和最大池化等[8]。由于本文输入数据维数不大,采用非重叠池化即可。
池化输出的特征图可用式(2)计算:

其中,β是相应权值,b是相应偏置,down(·)表示下采样函数。
3 仿真实验
卷积神经网络层的参数是分类器设计的核心,将预处理好的航迹数据送入定义好的网络中进行实验,通过不断改变网络的参数最终得到适宜于机动模式分类的分类器。
3.1 样本生成
设定目标不同的机动时间长短、机动幅度、初始位置等,利用MATLAB进行仿真,每种机动模式仿真生成1000个样本,共7000个样本。将这7000个样本随机分为4000个训练样本、2000个验证样本和1000个测试样本。
样本数据要经过一定预处理才可送入网络中。航迹数据与目标的起始位置有很大关系,而机动主要在于三维(x,y,z)的波动,与起始位置无关,故需去掉目标起始位置这样的“直流信号”,本文采取的方法是每个航迹样本减去该航迹数据的均值。
神经网络输入数据通常要进行归一化,一方面可加快收敛速度,一方面防止数量级大的输入数据对权重的影响过大导致无法训练。本文参考常规的神经网络数据预处理过程,将数据归一化到0.1~0.9。
3.2 分类器设计实现
通过仿真实验,得到效果最好的分类器如图4所示,在该分类器下7种机动模式的分类准确率为98.4%。

图4 最佳分类器
该分类器共有两层卷积网络,第一个卷积层卷积核为 1*10,共 20个卷积核,卷积步长为 1,卷积后将输入的3个通道变成 1个通道,得到1×241维数据,20个卷积核则产生20×1×241维数据;池化采用非重叠最大池化,池化时先将卷积得到的数据加了一个的边(pad),数据变为 20×1×243,池化核为 1*3,步长为3,池化后数据变为 20×1×81;第二层卷积层与第一层非常类似,只是卷积核为1*3;经过第二层池化后数据进入全连接层,设置隐藏单元数50;再将数据连接Softmax分类器。
图5(a)为在分类器下,训练集训练迭代次数和训练集损失函数曲线图。在训练集迭代训练网络同时,每间隔一定迭代次数向网络送入验证集,用以观察是否发生过拟合等现象。图5(b)为训练集迭代次数和验证集损失函数曲线图,图 5(c)为训练集迭代次数和验证集识别准确率曲线图。
由图5可看出,随着迭代次数的增加,训练集损失函数值不断减少,网络逐渐开始拟合。在迭代到2000次时到达最小值附近,开始出现波动。训练集损失函数波动是由于数据本身不平稳造成的,无法避免。验证集损失函数大小随着训练集同步减少,说明没有出现过拟合现象,并且在 2000次迭代左右,验证集的识别率基本达到饱和,达到98%左右,如图5(c)所示。
将训练好的网络对1000个测试样本进行测试,得到识别率为98.4%。
3.3 最佳分类器在连续航路下的识别效果
将机动触发点结合进目标机动模式识别,可实现连续航路的机动模式判断。
假定敌方空中目标从(10000,101000,1000)m处朝我方军事目标飞进,先做圆弧机动改变航向,再直线飞行一段距离,进入攻击区后做了两个蛇形机动以规避火力,再跃升再跃升俯冲机动对军事目标进行打击。

图5 最佳网络训练效果图
本文暂时将直线、圆弧直线过渡段、俯冲机动均作为退出机动模式。利用课题前期研究的拐点检测算法找到机动触发点后,不断将间隔5 s的数据送入训练好的网络中进行识别,直到出现退出机动模式。识别停止后重新开始寻找机动触发点,循环往复,实现对连续航路的机动模式识别。
图6为对上述连续航路的识别效果图。训练好的网络对航路预测结果分别为 2、3、1、1、3、4、6、5,由 3.1小节可知分别对应于圆弧转弯、圆弧直线过渡段、蛇形机动、蛇形机动、圆弧直线过渡段、跃升、跃升俯冲过渡段、俯冲机动。由图6可看出分类器对连续航路的识别达到了预期效果。
Air targets maneuvering pattern recognition based on convolutional neural netw orks
Zheng Changyan,Mei Wei
(Ordnance Engineering College of PLA,Shijiazhuang 050003,China)
In order to improve the air targets maneuvering pattern recognition accuracy,aiming at improving the system property of the robustness and resistance to noisy data,convolutional neural networks were applied to extract non-labor features from trace data directly for accomplishing the pattern recognition.Slide time window maneuvering pattern recognition method was proposed to solve the difficulty on maneuvering segmentation in actual situation,and then flow process diagram was given.Trace simulations were carried on after typical maneuvering pattern and parameters analyzed which provided reasonable training samples for convolutional neural networks.Suitable convolutional neural networks structure and parameters were identified after simulation experiments.The simulation results showed that the pattern recognition ratio was 98.4%on segmented pattern with the trained networks,at the same time,good results were achieved on continuous trace combined with the maneuvering trigger point.
maneuvering pattern recognition;convolutional neural networks;slide timewindow;trace simulation;data preprocess
TP399
A
1674-7720(2015)22-0050-03
郑昌艳,梅卫.基于卷积神经网络的空中目标战术机动模式分类器设计[J].微型机与应用,2015,34(22):50-52,56.
国防“十二五”预研项目(40405070102)
猜你喜欢
计算机应用(2022年9期)2022-09-25
软件导刊(2022年3期)2022-03-25
装备制造技术(2020年3期)2020-12-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
计算机技术与发展(2019年1期)2019-01-21
智能计算机与应用(2018年2期)2018-05-23
中成药(2017年10期)2017-11-16
智能系统学报(2017年5期)2017-01-22
海军航空大学学报(2015年1期)2015-11-11