基于RFID室内定位的语音拣选系统设计
2015-10-19 07:22马庆修任正云东华大学信息科学与技术学院上海201600
网络安全与数据管理 2015年18期
马庆修,任正云(东华大学 信息科学与技术学院,上海 201600)
基于RFID室内定位的语音拣选系统设计
马庆修,任正云
(东华大学 信息科学与技术学院,上海 201600)
针对传统的表单拣货方式越来越不能满足大型物流中心的需求,设计了基于语音的拣选系统,解决传统拣选方式存在的不足,提高货物拣选效率。为实现拣选操作员的合理调度,系统引入RFID室内定位技术,针对仓储拣选实际应用,以LANDMARC算法为基础进行算法改进,改进后系统的定位准确度提高了2%~60%,同时增强了实用性。系统实验表明,基于室内定位的语音拣选系统能够有效实现相应功能,具有较好的市场应用前景。
语音识别;物流拣选;RFID室内定位;LANDMARC算法;k-近邻算法
0 引言
拣选(Order Picking)作业是指按订单或出库单的要求,从存储场所选出物品并放置在指定地点的作业,拣选作业是物流中心作业中最为关键的环节之一。传统的拣选方式有拣选单拣选、标签拣选、射频RF拣选等。随着物流业的飞速发展,传统的拣选方式不仅束缚了拣选工作效率,而且存在成本高、差错率大等不足。因而,本文设计了基于语音识别的拣选系统,与传统拣选技术相比,语音分拣技术具有极大提高订单准确度、提高工作效率、培训要求低和投资回报率高等优势[1]。在国外,语音拣选系统已有成功案例,但在我国,由于本土化问题,如中文识别播报,语音拣选技术在国内还没有很好的应用。本文设计的系统使用中文语音识别模块,能够很好地应用于语音仓储拣选。在拣选作业过程中,将近50%的时间花费在拣选的路上。为提高拣选的效率,本文引入室内定位技术,选择离待拣选货物最近的操作员拣取该货物,通过合理调度大大提高拣选效率。该拣选系统以语音识别技术为基础,以室内定位技术为支撑,搭建一个快速、精准、高效的语音拣选系统,真正实现“解放双手,解放双眼”。
1 相关技术
从应用方向分析,语音识别主要分为关键词语识别和听写系统两个方面。关键词语识别技术的目标是精确地识别说话人的语音命令,识别率要达到90%以上,用在语音控制和语音命令查询方面,例如在手机上实现的语音拨号功能。听写系统是前端的声学模型不要求精确识别,而是输出尽可能多的音标候选,由后续的语义分析器给出拟合的文字内容,例如IBM推出的ViaVoice软件和Google的语音搜索。但就目前的技术现状,还未出现一个更加完善的理论模型来指导听写系统的发展,目前的听写系统还只能是实验产品,无法达到真正理解人的自然语音的水平。所以,在目前能够提供商业实用产品的技术,依然是关键词语识别技术。本系统采用ICRoute公司设计生产的LD3321芯片作为语音识别的主控芯片,此芯片是基于关键词语识别的。
目前室内定位采用的主要技术有GPS技术、超声波技术、红外线(IR)技术、WiFi技术、超宽带(UWB)技术、射频识别(RFID)技术等,但大多技术因受多径效应、非视距传播影响以及精度限制等不能得到很好的推广。射频识别(RFID)技术利用射频方式进行非接触式双向通信交换数据以达到识别和定位的目的。这种技术作用距离短,但它可以在几毫秒内得到厘米级定位精度的信息,且传输范围很大,成本较低。同时由于其多目标识别、非接触和非视距等优点,可望成为优选的室内定位技术。本系统采用射频识别(RFID)技术实现仓储人员的室内定位。
2 系统总体设计
基于室内定位的仓储语音拣选系统的系统总体框图如图1所示,语音拣选系统主要包括语音识别部分和RFID定位部分。

图1 系统总体框图
该语音拣选系统语音识别模块采用 ICRoute公司设计生产的V280语音识别标准模块,该模块能够独立完成语音识别,并根据用户设计实现相应的操作;模块基于本地的语音识别,识别命令相对于“云端”语音识别,其具有没有延迟、不受网络稳定性影响等优点;模块以LD3321芯片作为语音识别的主控芯片,此芯片是基于关键词语的识别,采用成熟的非特定人语音识别芯片技术,能够有效地实现语音识别,并且能够支持语音播放功能;同时,模块具有丰富的外设接口,方便进行控制。为实现操作人员的有效调度,提高拣选效率,系统采用先进的室内定位算法,并依据系统的特殊性进行算法改进,下面详细介绍定位算法的实现。
3 RFID定位算法分析
目前,比较成熟的RFID室内定位方案有SpotON、3D-iD pinpoint和基于动态有源RFID校准定位(Location Identification based on DynamicactiveRFID Calibration,LANDMARC)[2]。其中技术最成熟,应用最广泛的是LANDMARC算法。LANDMARC算法引入参考标签概念,应用“最近邻”思想,求待测点位置。即以确定坐标的RFID标签为参考,与参考标签越近的待测标签,其在同一个RFID读卡器中读得的信号强度应该越相近。然后通过相应的公式计算获得待测标签的坐标位置[3-5]。
LANDMARC算法引入参考标签降低环境因素影响,获得较高的定位精度。但其也存在一些不足,LANDMARC算法将所有参考标签都设为其邻近标签,并计算其与待测标签的欧氏距离,这势必增加系统的计算量,还可能会影响到定位精度。而且为提高LANDMARC算法定位精度,就需要增加参考标签排放密度,然而密度增加会加剧信号之间的干扰,从而又导致定位精度降低。
4 LANDMARC系统算法的应用改进
分析拣选系统的特性,语音拣选系统定位要求是找到离设定位置(待拣选货物)最近的待测标签(操作员),而不是关心所有待测标签(操作员)的具体位置,因而不需要计算所有待测标签的具体位置,可以先找到靠近设定位置(待拣选货物)的一些待测标签(操作员)形成一个集合,再在这个集合中找到离设定位置(待拣选货物)最近的待测标签(操作员),对其下达拣选命令。因而对LANDMARC系统进行改进。
对LANDMARC系统“k邻域”算法中 k的取值进行研究,实验得到,在参考标签的密度适中时,当k值为4时定位精度最理想[6-10]。因而,在改进算法中,以待拣选货物所在网格的4个参考标签为邻居标签,选取K个欧几里德距离最小的待测标签(操作员),然后利用公式求得距离货物最近的操作员。语音拣选系统室内定位布置示意图如图2所示。
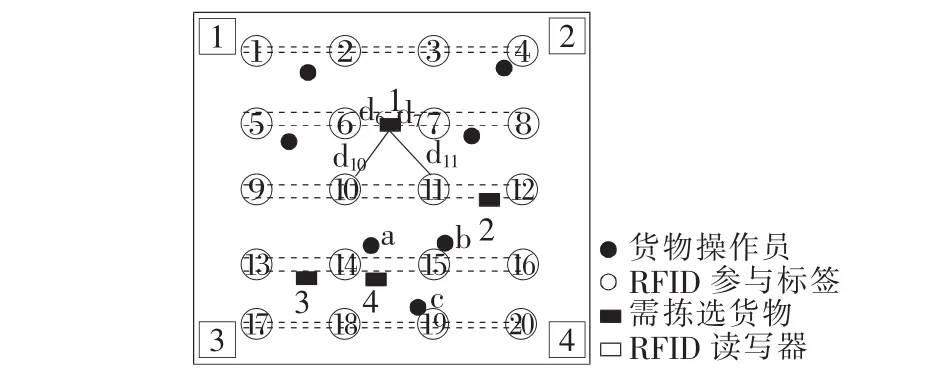
图2 语音拣选系统室内定位布置示意图
算法改进过程如下(n个阅读器,m个参考标签和u个待定位标签):
(1)分别获得u个带定位标签关于n个阅读器的信号强度矩阵:

再获得包围待拣选货物的矩形定点上的4个参考标签(分别编号为a、b、c、d)关于n个阅读器的信号强度矩阵:

(2)如图 3所示,当需要拣选的货物位置在⑥、⑦、⑩、11○参考标签围成的方框区域内时,分别使用 6、7、10、11号参考标签为邻居标签,利用式(3)得到所有以6、7、10、11号参考标签为邻居标签与待测标签的值,即为其欧式距离。根据参考标签离需拣选货物的距离关系,由式(4)选取 Mj值最小的前 K(1≤K≤u)个待测标签,表示这K个标签离需选取的货物位置相对较近。其中,kj由式(5)获得,其中di对应图 2中的距离。

(3)通过式(6)求得选取的该 K个待测标签的坐标(x,y):

(4)得到这4个点的坐标后,利用式(7)求出e最小的点,即离(x0,y0)最近的待测标签,其中,(x0,y0)为需选取货物的坐标,选择该最近的待测标签(操作员)为接收拣选命令的操作员。

5 实验结果分析
按照图2实验布局,每一排中相邻两参考标签之间距离为2m,每两排之间距离为1.5m。约定当系统选择离待拣选货物最近最方便的操作员完成拣选任务即为此次定位正确。通过大量实验得到,当K〈5时,随着K的增大选取最近待测标签的准确率提高;当K≥5时,随着K值的增加选取最近待测标签的准确率只存在微弱波动,而K值的增加带来额外的计算。因而,K=5时系统性能最佳。
取K=5,实验得到算法改进前后选取最近操作员正确率对比图如图3所示。其中,横坐标对应图2中待拣选货物的序号,纵坐标为选取操作员的正确率。
从图3可以看出,改进算法较原来的LANDMARC算法准确率有所提高。而且,实验中定位错误时选择的操作员的位置与在实际离待拣选货物最近的操作员位置相邻近。因而,系统定位准确率能达到拣选定位要求。

图3 定位正确率对比图
分析结果数据可知,对于2、4号待拣选货物定位选择操作员准确率明显提升。以4号待拣选货物为例,从系统布局示意图可以看出,与4号待拣选货物距离相对较近的有a、b、c位操作员,由无线电波在室内传播模型分析,相对于带定位标签a、b,带定位标签c由于与货物4周围的14、15、18、19号参考标签在同一条走廊上,因而路径损耗相近,系统定位时更容易选择c为最近操作员。由此可得,当操作员与待拣选几何距离相近时,改进算法能够选择相同走廊上的操作员完成拣选工作,而避免选择与待拣选货物不在相同走廊上的操作员而走远距离完成拣选任务的情况,从而提高拣选效率。
6 结论
本文设计了基于室内定位的仓储语音拣选系统,系统使用ICRoute公司设计生产的V280语音识别标准模块,完成语音命令的下达与识别。为提高拣选操作员调度效率,系统以LANDMARC室内定位算法为基础,以语音拣选仓库为实际应用目标,对室内定位算法进行应用改进,与原始LANDMARC算法相比较改进后的算法定位精度提高2%~60%,实用性更强。该系统具有较好的市场应用前景。
[1]浦震寰.语音拣选技术的优势与应用分析[J].物流技术与应用,2013,18(8):120-121.
[2]潘爵雨.基于RFID的室内定位技术及其应用研究[D].广州:华南理工大学,2012.
[3]游战清,李苏剑.无线射频识别技术(RFID)理论与应用[M].北京:电子工业出版社,2004.
[4]Zhao Yiyang,Liu Yunhao,NI L M.VIRE:active RFID-based localization using virtualreference elimination[C]. International Conference on Parallel Processing,ICPP 2007,2007:56.
[5]NI L M,Liu Yunhao,LAU Y C,et al.LANDMARC:indoor location sensing using active RFID[C].Proccedings of the First IEEE International Conference on Pervasive Computing and Communications, PerCom 2003, 2003:407-415.
[6]闫保中,姜琛,尹伟伟.基于 RFID技术的室内定位算法研究[J].计算机仿真,2010,27(2):320-324.
[7]PAPAPOSTOLOU A,CHAOUCHI H.RFID-assisted indoor localization and the impact of interference on its performance[J].Journal of Network and Computer Applications,2011,34(3):902-913.
[8]李魏峰.基于RFID的室内定位技术的研究[D].上海:上海交通大学,2012.
[9]周惇.基于射频识别的室内定位系统研究[D].西安:西安电子科技大学,2013.
[10]何毅,黄俊,邹传云.基于RFID的虚拟标签算法研究与改进[J].电子技术应用,2014,40(10):99-102.
Voice picking system based on indoor positioning technology of RFID
Ma Qingxiu,Ren Zhengyun
(College of Information Science and Technology,Donghua University,Shanghai 201600,China)
According to the traditional way of form picking cannot meet the growing demand of large-scale logistics center,this paper designed a picking system based on voice,to make up of the deficiencies of traditional picking mode,and improve the picking efficiency.While,in order to schedule picking operator reasonably,RFID indoor positioning technology is introduced into this system based on LANDMARC algorithm and improved it.From the improved system the accuracy of positioning is promoted 2%~60% and it becomes more practical.The system experiment shows that,voice picking system based on indoor positioning can effectively achieve the corresponding function,and has a good market application prospect.
auto speech recognize;logistics picking;RFID indoor positioning;LANDMARC algorithm;k-nearest algorithm
TN925;TP23
A
1674-7720(2015)18-0050-03
马庆修,任正云.基于RFID室内定位的语音拣选系统设计[J].微型机与应用,2015,34(18):50-52.
2015-05-29)
马庆修(1990-),男,硕士研究生,主要研究方向:物联网、嵌入式。
任正云(1969-),男,博士,教授,主要研究方向:先进过程控制、模型预测控制。
猜你喜欢
军事文摘(2022年13期)2022-08-27
小猕猴学习画刊(2019年9期)2019-11-08
当代旅游(2019年3期)2019-09-19
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
科学与财富(2017年24期)2017-09-06
小天使·三年级语数英综合(2017年6期)2017-06-07
雷达学报(2017年1期)2017-05-17
自动化学报(2017年11期)2017-04-04