
随钻井下姿态测量系统
2015-10-19 07:22:28贾衡天张程光高文凯范锦辉中国石油集团钻井工程技术研究院北京102206
网络安全与数据管理 2015年18期
贾衡天,张程光,高文凯,管 康,范锦辉,彭 浩,邓 乐(中国石油集团钻井工程技术研究院,北京 102206)
随钻井下姿态测量系统
贾衡天,张程光,高文凯,管 康,范锦辉,彭 浩,邓 乐
(中国石油集团钻井工程技术研究院,北京 102206)
在随钻石油钻探时需要准确地了解钻具的姿态信息,通过对姿态信息的测量可以准确地掌握井眼的方位参数。随着近年来石油工业的发展,要求石油钻井技术采用精确的轨迹控制技术,适应定向井、水平井和大位移井等应用的需要。设计一种井下姿态测量系统,可以工作在随钻条件下,通过测量三轴陀螺仪、加速度计和磁阻传感器的信号并进行相应的算法处理,得到钻具在井下的姿态信息。
钻具姿态;方位参数;轨迹控制;算法处理
0 引言
随着石油钻探的大开发,我国石油资源开发面临着严峻的形式。大量的规模开发的油田正在进入资源开发的后期。地质勘探发现的新的开发区块处在海洋、沙漠等特殊的环境。石油钻探和开采的技术难度和成本都相对上升。而处在开发后期的油气田区域也面临着对于薄油气层、复杂油气层等难以开发的油气储层。在这种形式的推动下,需要进行水平井、多分枝井和大位移井等复杂结构的油井的钻探。这就要求应用地质导向钻井技术,而导向钻井技术需要了解的关键工程参数就是钻具在井眼中的姿态。
1 钻具姿态测量的原理
在进行实时钻具姿态计算过程中,需要使用惯性传感器、加速度计和磁阻传感器的测量数据。通过加速度计测量加速度信号,通过陀螺仪测量出加速度信号,通过磁阻传感器测量出磁场强度信号[1]。测量到的信号通过姿态计算算法得到井下钻具俯仰角、翻滚角和方向角信息。姿态计算的过程也是坐标转换的过程。
由于两种不同坐标系之间存在着不同的位置关系,而使用变换矩阵可以表示它们之间的这种关系[2]。如图1所示,钻具的载体坐标系 OX1Y1Z1绕着 OZ1轴逆时针旋转α角度后可以形成新的坐标系OX2Y2Z2,由于是绕着 OZ1轴旋转,因此存在于OX1Y1Z1坐标系的 OX1Y1平面的空间向量 r可以在 OX1Y1Z1坐标系形成一个投影,其在投影的分量为[AX1AY1AZ1]T而空间向量 r在旋转后的坐标系 OX2Y2Z2上的投影为[AX2AY2AZ2]T。这两种投影分量之间存在相应的坐标关系。由于坐标系OX1Y1Z1是绕着OZ1轴逆时针旋转得到坐标系OX2Y2Z2,因此在OX1Y1平面上的向量r在两个坐标系的OZ轴上的投影相等,即AZ1=AZ2=0。
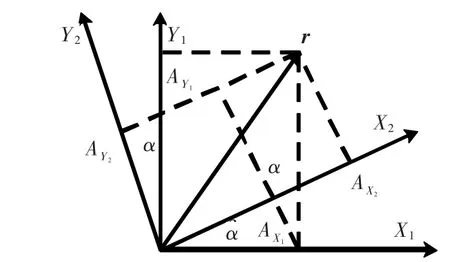
图1 钻具坐标变换
而空间向量r在OX2Y2Z2坐标轴上的投影分量的计算公式为:
AX2=AX1cosα+AY1sinα
AY2=AY1cosα+AX1sinα
AZ1=AZ2=0
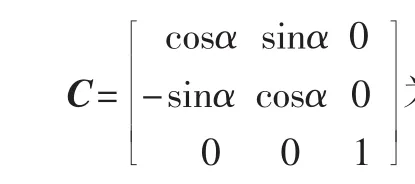
将上述等式关系转换成矩阵关系公式为:
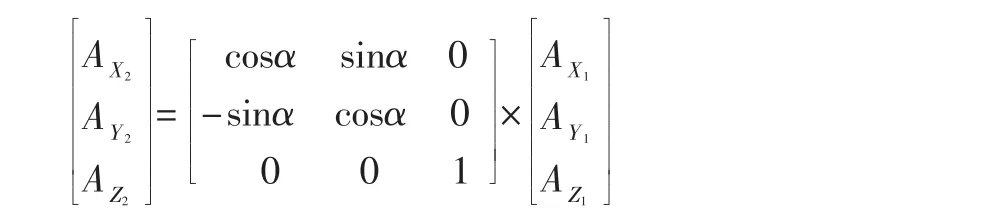

而钻具在井下的姿态不会只在单一OX1Y1平面上变化,其应该在三维坐标系中动态变化。因此钻具的OX1Y1Z1坐标系变化可以被认为是先绕着OZ1轴转动Ψ形成OX2Y2Z2坐标系,然后绕OX2轴转动θ形成OX3Y3Z3坐标系,再绕OY3轴旋转γ形成OX4Y4Z4坐标系。从钻具OX1Y1Z1坐标系旋转到最后OX4Y4Z4坐标系形成变换矩阵为:
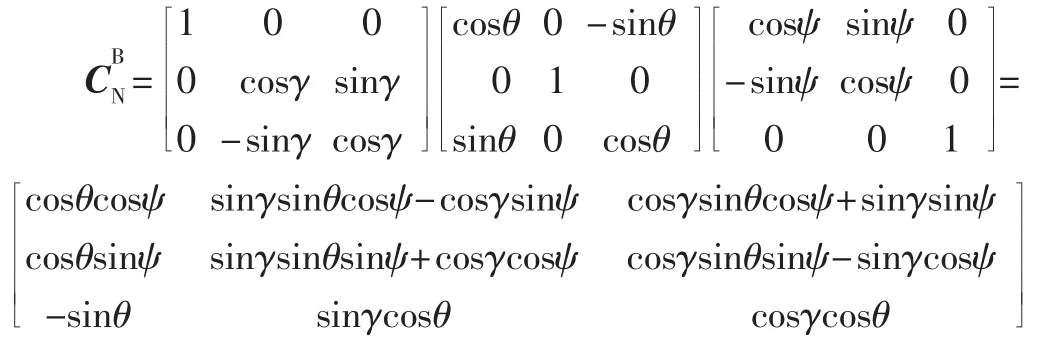
上述公式也可以表示为矩阵:
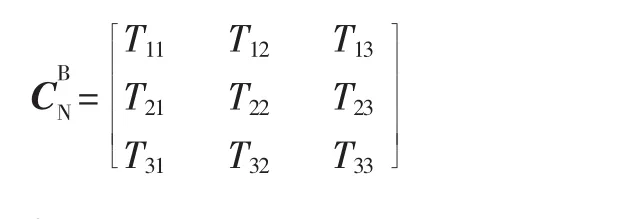
而此时的姿态角可以通过以下公式计算出:
其中,ψ代表偏航角,θ代表俯仰角,γ代表横滚角。
2 随钻井下姿态测量系统电路
随钻井下姿态测量系统通过测量控制器测量数字MEMS惯性传感器元器件的输出信号,并对测量的信号进行相关的算法处理。测量系统的主要惯性传感器元器件包括:数字三轴加速度计、数字三轴陀螺仪和数字三轴磁阻传感器。
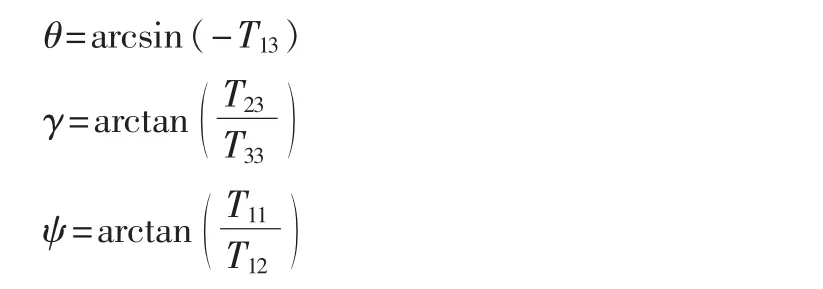
整个测量系统由ARM控制器STM32、3个MEMS传感器以及传感器相应电路组成。各个传感器负责测量角速度、加速度和磁场的数据,并由STM32控制器来处理数据。系统硬件结构图如图2所示。
图2 姿态测量系统硬件结构图
电路的电源供电系统由低噪声低压差器件构成,负责提供整个硬件系统所需要的功率电源。STM32控制器与传感器之间为I2C接口,STM32控制器内部的浮点运算单元可以快速处理3个传感器测量的数据。
三轴数字陀螺仪采用ST公司的L3G400D,其可以测量出3个相互正交轴方向的角速度,STM32控制器通过I2C接口设定其测量时的量程范围。测量范围从±250dps到±2 000dps,低量程测量的角速度精度高,但传感器响应速度慢。高量程传感器响应速度快,但加速度的测量精度比低量程差[3]。三轴数字陀螺仪输出的信号需要通过相应的公式计算来得到相应的角速度数据。随钻井下姿态测量系统的陀螺仪采用的测量范围是±300dps,陀螺仪测量精度为1°/s,应测量的电压值为6mV的增量。因此陀螺仪测量得到最高输出电压为:
2.5 V+300×0.006=4.3V
要将测量到的电压值转换成响应的角速度值,需要通过以下公式进行计算:其中,ω为计算后得到的角速度值。

加速度传感器的主要作用是测量钻具与重力方向间的夹角,在钻具静止状态和匀速运动状态下可以直接测量出重力作用产生的加速度,因此可以对钻具的俯仰角和横滚角进行测量[4]。要实现钻具在钻进状态下的姿态测量,还需要用陀螺仪的测量数据进行配合。
三轴加速度传感器将测量到的加速度值转换成为数字量,通过I2C接口输出给STM32控制器进行相应的数字信号处理。
磁阻传感器用来测量钻具的方位,其由磁阻薄膜合金组成惠更斯电桥[5]。它能将磁场强度转换成电压进行输出,再由AD器件对其进行采集,对采集的数据进行处理。
3 随钻井下姿态测量系统数据处理
随钻井下姿态测量系统对测量传感器测量数据的处理主要是先对加速度传感器、陀螺仪传感器和磁阻传感器的测量数据进行预处理,再由相应的计算方法将3个传感器预处理后的数据相互结合计算出钻具在井下的俯仰角θ、横滚角γ和偏航角ψ姿态信息[6]。加速度传感器测量得到钻具的速度增量信号,陀螺仪测量得到钻具的角度增量信号,而磁阻传感器测量到地磁磁场强度信号。
系统中的加速度传感器在静止和匀速运动时测量到的数据信噪比比较好[7]。但在井下钻具钻进过程中存在着加速性质的运动,产生随机干扰影响测量数据的信噪比,因此对加速度传感器的信号的预处理需要以短时间的低频信号为主[8]。其次用数字低通滤波器和均值滤波都可以对信号进行较好的处理。而数字均值滤波的数据处理实时性好,而且可以借用ARM处理器内部的硬件平均滤波器完成。因此系统采用数字均值滤波的方式对短时间内采样的加速度传感器信号进行预处理。主要的处理过程为对N个采样数据进行选择,选择出其中一个与其他数据的差值的平方和最小的数据。因此对采样数据量N有一定的要求,N值越大信号滤波后的效果越好[9]。
姿态测量系统的陀螺仪测量的角速度信号动态特性高,其测量的输出结果包含的噪声主要为高斯白噪声。测量系统采用卡尔曼滤波器对其进行有效滤除[10]。
随钻井下姿态测量系统将各个传感器的数据进行预处理后,需要将各个传感器的处理结果进行结合并解算出钻具在井下当前状态的姿态信息,主要为俯仰角θ、横滚角γ和偏航角ψ信息。
为进行与钻具姿态信息相关测量,就必须根据传感器信息计算出俯仰角θ、横滚角γ和偏航角ψ。由于从三轴陀螺仪传感器读取的数据为AD转换后的结果,因此要将三轴陀螺仪AD转换的结果变成弧度每秒,以便后面进行计算。由于三轴陀螺仪的测量结果为X轴、Y轴和Z轴的加速度值,该值为16bit长度,范围从0000到7FFF(十进制为0~32 767),因此当陀螺仪传感器的测量为1 000°/s时,1°/s对应的数值大约为32.8,计算公式为:
1°/s对应数值=32 767/1 000≈32.8
然后将AD转换后的值计算转换成为弧度每秒,计算公式为:
roval=ADC/32.8
需要确定比例增益KP来控制加速度计和磁力计的收敛速度,需要确定积分增益Ki控制陀螺仪的偏置。初始化参数为:Kp=1.0f、Ki=0.53f。初始化用于估计方向的使用的四元数q0=1,q1=0,q2=0,q3=0。初始化姿态解算误差的积分值exInt=0,eyInt=0,ezInt=0。halfT定义为姿态解算周期的一半时间,由于姿态解算周期的时间为0.002 s,因此halfT=0.001s。
计算中间变量,其公式为:
将测量到的加速度的原始数据进行归一化处理,得到单位加速度值。
将测量到的磁场传感器的原始数据进行归一化处理,得到单位磁场值。
计算地球磁场的参考方向,计算公式为:
计算加速度计测出来的重力向量和姿态来推算出的重力向量之间的误差向量,计算公式为:

对误差进行积分,将误差处理后后补偿到陀螺仪,计算公式为:
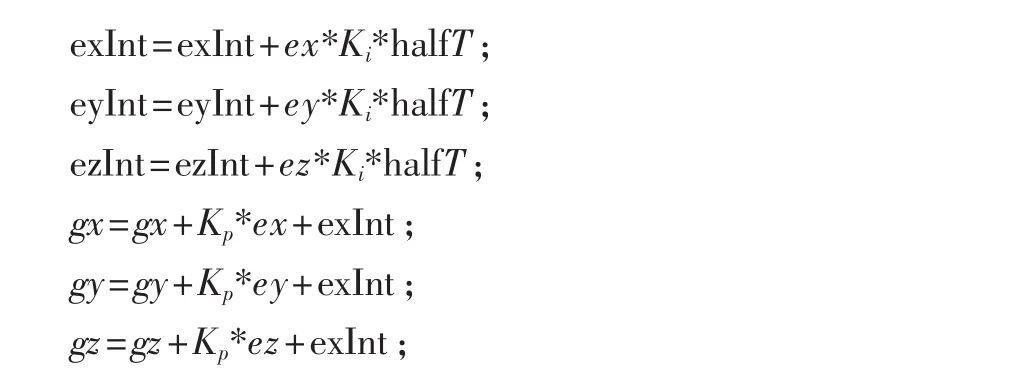
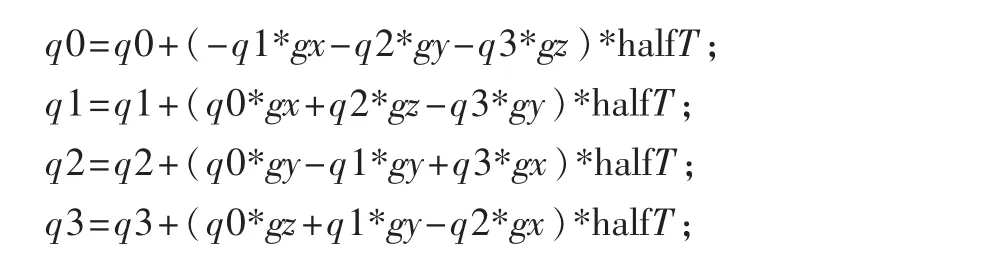
带入四元数微分方程进行计算,更新计算结果,计算公式为:
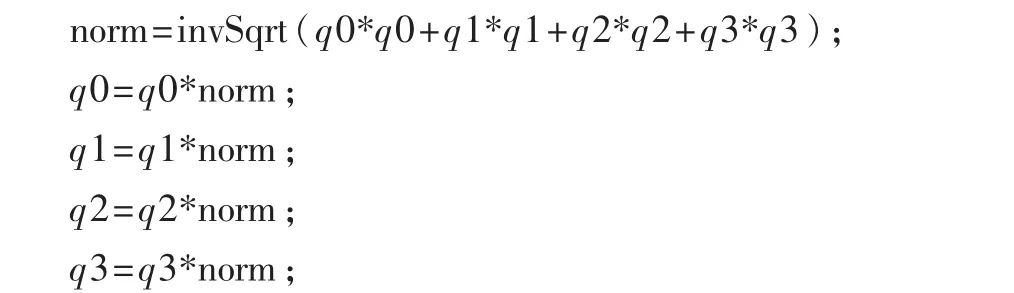
对计算后的四元数进行归一化,计算公式为:
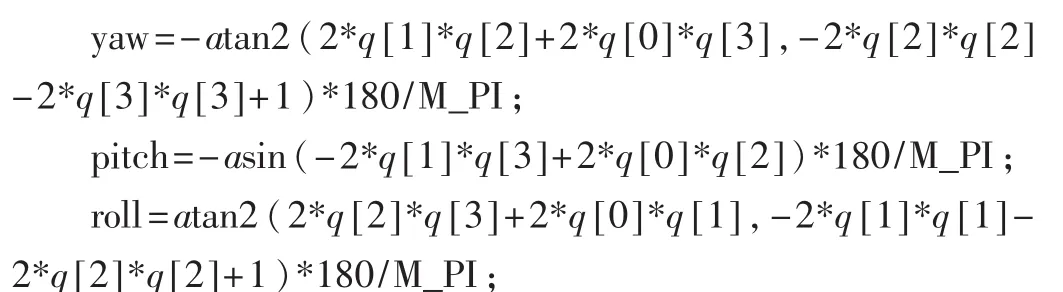
有解算出的四元数计算与钻具相关的姿态信息:航向角(yaw)、俯仰角(pitch)和横滚角(roll)。计算公式为:
4 井下随钻测量装置的实验
将井下姿态测量电路封装在铜管电路仓体内,并对该系统进行测试。测试的结果通过电路板的串口发送给上位PC,通过串口发送的测量信息为:俯仰角、翻滚角和航向角。上位机接收到数据并进行处理和显示。串口发送的数据中也包含了加速度传感器、磁场强度传感器和陀螺仪传感器的原始数据,测量的三轴加速度传感器数据如图3所示。
三轴加速度传感器的z轴测量数据为 accz曲线,三轴加速度传感器的y轴测量数据为accy曲线,三轴加速度传感器的x轴测量数据为accx曲线。
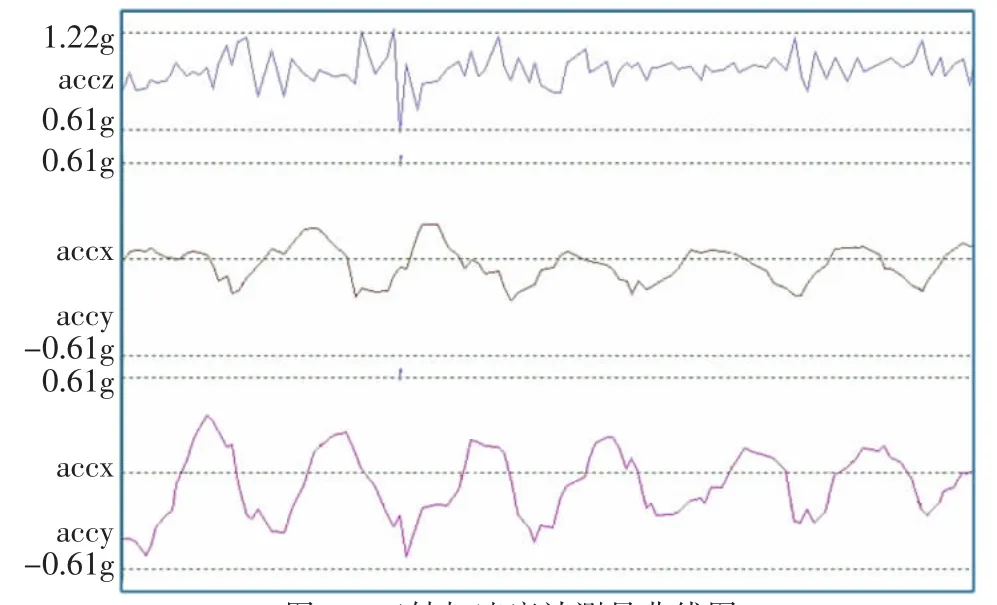
图3 三轴加速度计测量曲线图
三轴陀螺仪测量的数据曲线如图4所示。
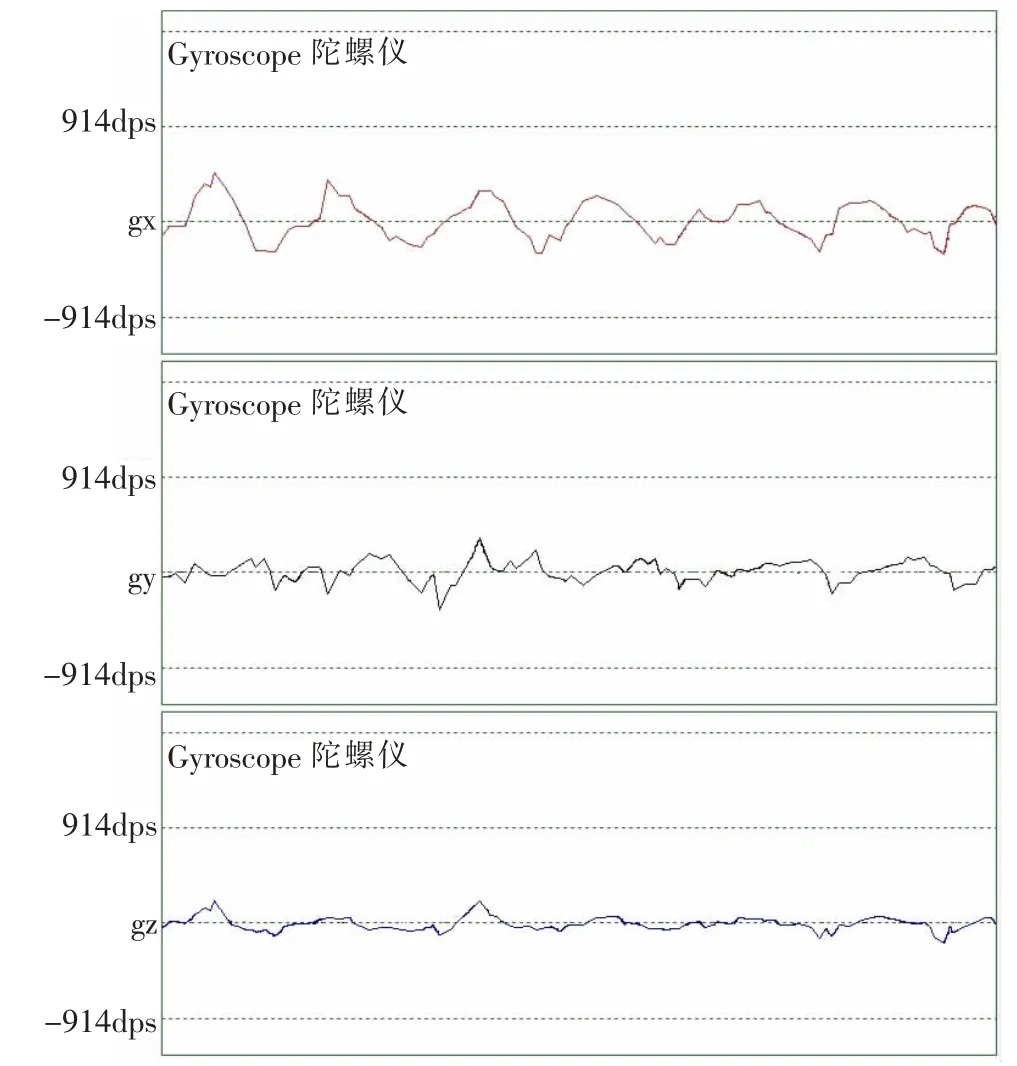
图4 三轴陀螺仪测量曲线图
红色曲线为三轴陀螺仪X轴测量的数据,黑色曲线为三轴陀螺仪Y轴测量的数据,蓝色曲线为三轴陀螺仪Z轴测量的数据。
随钻井下姿态测量系统根据传感器测量到的数据解算得到姿态数据如图5所示。
曲线YAW为钻具的姿态测量系统解算得到的偏航角,曲线ROLL为钻具的姿态测量系统解算得到的横滚角,曲线PITCH为钻具的姿态测量系统解算得到的俯仰角。
5 结论
随钻井下姿态测量系统采用三轴数字陀螺仪三轴加速度传感器和三轴磁阻传感器为核心元件构成测量装置,能对井下钻具的三轴角速度、三轴加速度和三轴磁场强度进行实时测量和记录。其通过实时采集三轴传感器数据信息,并通过相应的算法处理获得钻具在井下的姿态。通过对随钻井下姿态测量系统的实验,证明了其能准确测量出钻具的俯仰角、横滚角和偏航角姿态信息。该系统对实时准确掌握井眼的方位参数、精确地控制钻具在钻进过程中形成的井眼轨迹起着重要的作用,可用于油田水平井、大位移井等钻井勘探的开发。
Attitude measurement system Downhole drilling
Jia Hengtian,Zhang Chengguang,Gao Wenkai,Guan Kang,Fan Jinhui,Peng Hao,Deng Le
(Research Institute of Drilling Engineering and Technology of China Petroleum,Beijing 102206,China)
In drilling oil drilling it′s important to accurately understand the attitude information of drilling tool.By measuring the attitude information accurately it can grasp the orientation parameters of borehole.With the development of petroleum industry in recent years,it need to use precise trajectory control technology for oil drilling technology to adapt to directional wells,horizontal wells and large displacement well application.This paper designs a downhole attitude measurement system which can work in drilling conditions.By measuring the signal of three axis gyroscope,accelerometer and magnetic sensor.and doing corresponding algorithm,it can get the attitude information of underground drilling.
drill attitude;the position parameter;trajectory control;processing algorithm
TE21
A
1674-7720(2015)18-0001-04
贾衡天,张程光,高文凯,等.随钻井下姿态测量系统[J].微型机与应用,2015,34(18):1-4,7.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
学生天地(2020年3期)2020-08-25 09:04:16
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
山东工业技术(2016年15期)2016-12-01 05:32:01
凿岩机械气动工具(2016年1期)2016-11-11 07:33:35
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
深空探测学报(2016年2期)2016-05-17 05:19:17
凿岩机械气动工具(2015年3期)2015-11-11 07:32:54
