
Laser Measurement System of Railway Contact Cable about Geometrical Parameters
2015-10-13 07:30LINDengweiLIDongliang
电子器件 2015年1期
LIN Dengwei,LI Dongliang
(College of Information Engineering of Jiaozuo University,Jiaozuo He’nan 454000,China)
Laser Measurement System of Railway Contact Cable about Geometrical Parameters
LIN Dengwei*,LI Dongliang
(College of Information Engineering of Jiaozuo University,Jiaozuo He’nan 454000,China)
In order to detect geometrical parameters of contact cable in real-time and effectively,ensure the running of railway and prolong the using time of laser cable,the laser measurement system of contact cable about geometrical parameters is proposed.Distance sensor,angle sensor,displacement sensor,CCD camera and embedded data processing technology are applied to this system.The architecture and measurement principle of the system are introduced,the mathematics model and the error range are described in detail,and the main parameter measurement indetermination degree of the system are analyzed and evaluated.Compared with previous measurements,orientation can be implemented in this measurement system,besides the measurement of railway contact net’s parameters can speed up,whose accuracy can reach±5 mm.
automation technology and equipment;measuring techniques;laser;railway contact cable;sensor;geometrical parameter
电力机车本身不带原动机,依靠接触网电流作为能源,由牵引电动机驱动机车的车轮,所以铁路接触网的工作状态直接影响电气化铁路的运载能力[1]。在电气化铁道设备故障中,接触网故障所占比例相当大。作为牵引供电系统主体的接触网,其状况的好坏最终影响机车的运行速度与安全[2]。接触网检测的几何参数:导线高度、拉出值、平行线间距、定位器坡度等,是与安全密切相关的接触网自身结构参数。一些如速度、定位点、温度、补偿等式接触网检测的辅助参数,对检测结果起到定位参考、辅助分析等作用。随着列车运行速度的加速和高速铁路的建设,要求作为供电系统的接触网,几何参数检测不仅要求方便易操作,而且也要更加精确。目前,国内铁路接触网几何参数检测方式主要有以下几种:①在受电弓上安装传感器的接触式测量,缺点是测量参数不完备;②采用测杆、线坠的便携式接触测量,缺点是人工控制的机械式操作,容易产生意外及易受外界条件影响,精度低;③采用摄像机技术成像的非接触式测量,缺点易受外界气象条件的影响,导致测量精度不高;④采用激光测距仪,使用激光测距仪,只能测量轨道平面的垂直方向,但不能测量轨道平面的水平方向[3-4],故轨距、跨度和结构等的测量都受到限制。基于对传统测量方法优缺点的对比,同时根据对实际接触网检修和维护的需求,本文提出了一种高性能的基于多种传感器的测量系统,该系统中应用了距离、角度和位移等多种传感器、CCD摄像头以及嵌入式数据处理技术。该系统不仅测量架空接触网的高度,拉出值等,还可测量轨距,跨度等接触网的自身结构参数[4]。整个测量系统操作简单,参数测量速度快,精度高。
1 测量系统的硬件组成和操作原理
该测量系统的硬件组成包括测量仪、距离、角度、位移等传感器、CCD组件,标准器,显示屏和操作面板等,见图1。
测量仪主要由半导体激光器组成,用于测量物体的距离、方位角和俯仰角。CCD组件用来观察和定位测量对象,其中,焦距和口径可根据测量对象的距离和大小自动调节[5]。CCD摄像头具有较高的信噪比、抗强光、抗震动等优点,可确保测量对象更清晰,更准确。该系统中使用3.5 inch的LCD,用以显示测量对象的参数信息;另外操作面板中设计了一些操作按钮用以对参数的保存、删除等操作。除了测量仪外,标准器安装了角度传感器和位移传感器,用来测量钢轨平面和水平面的角度。测量系统的工作原理图见图2。

图2 测量系统的工作原理图
图2中,A是一个测量点,A'是A在轨道平面的投影,B是A'在两个轨道中心线上的垂足,D为测量基准点,O是D在轨道1上的垂点,α是A'D和DO的夹角,β是DA和轨道平面的夹角。利用三角形原理可计算AA'(超高值)和A'B(拉出值)等参数;利用AA'和A'B可以计算出水平间距、错位角等[6]。利用光栅、相位激光测距仪可以测出精确的角度和距离等。
2 测量系统的数学模型和误差分析
接触网参数的测量工程中需要使用的参数有一下一个:光栅的角度值,测距仪的距离范围,位移传感器的电阻值和倾斜传感器角度范围,其中光栅的角度值:和轨道水平方向的夹角为α,和轨道平面的垂直方向的夹角β;激光测距仪的范围为0.5 m~70 m;倾斜传感器角度范围为-10°~10°;位移传感器的电阻值为5 kΩ[7]。
2.1测量点投影在轨道平面坐标系统的位置
测量点投影在轨道平面坐标系统中位置的计算公式为:

其中L″是测量点投影在轨道平面坐标系中的距离; L是测距仪测出的对象的距离;α是测量点在轨道平面坐标系中的夹角,β是测量点和轨道平面的夹角[5]。
式(1)的误差公式:

当α和β为0°,ΔL″值最大:ΔLmax=ΔL=2 mm
由式(2)可知,测量对象在轨道平面上的参考系中的距离误差主要受测距仪误差的影响。
2.2接触线超高值测量
接触线超高值测量的计算公式:

由式(3)可知,L为测距仪测量出的对象的距离; β角是测量对象和轨道平面的夹角,ΔHmax=2 mm。
2.3拉出值测量
接触线拉出值是指在定位点处接触线与受电弓中心线行迹之间的距离值。在直线区段上,又可以定义为定位点处接触线相对于线路中心的偏移距离。测量范围:(-600 m~600 m),一般测量位置位于铁轨左侧。接触线拉出值计算公式为:

其中D为接触线拉出值,L是测距仪测量对象的距离;α为定位点和参照轨道的夹角;β为定位点和轨道平面的夹角。由式(4)可知,当α和β是0°,ΔD是值得的最大值,ΔDmax=2.125 mm。
3 系统的软件部分
软件部分用来收集处理信息并在控制终端上进行显示,采用的是轮流分析法。软件部分分成上层和底层两部分,均运行在嵌入式Linux操作系统中。
软件部分的工作流程是:观察网关CCD图标,通过采集卡把信息传送给主CPU,处理后传送到终端上显示;测量仪测量导线的倾斜角度、轨距和角度[3]等参数,然后传送给嵌入式ARM9微处理器进行数据处理,得到测量参数,保存有用的数据,最后电子报表自动生成系统对测量参数进行分类处理,生成一个标准的电子文档。
4 系统的不确定度分析
该测量系统测量出的接触网的高度和拉出值等参数,根据JJF1059—1999《测量不确定度评定与表示》对测试结果进行分析和评估,测量精度为±5 m,测量系统的不确定度主要来源于测量的重复性、测量的环境和测量对象的位置差异,以及测量基准的不同。
4.1重复性测量
选择不同的测量点,测试系统重复10次,测试结果见表1。H是接触线的测量高度,L表示拉出值。其标准偏差分别表示为SH(Height Standard Deviation)、SI(Standard Deviations)、Pr(Parameter)。

表1 测试结果(重复测量)
根据公式计算出标准偏差:SH1=0.83,SL1=0.37。
4.2环境因素影响的不确定度
对接触线高度连续10次测量,测量数据如表2所示。

表2 测试结果
计算出的标准偏差:SH2=0.63,SL2=0.28。
4.3变换测量对象的位置
调整接触线参量,Pr测量一次完成,并重新定位接触线,重复10次测量,测量数据如表3所示。
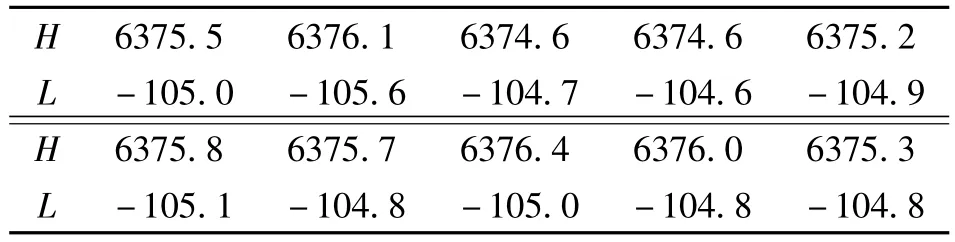
表3 测量结果(变换对象位置)
计算出的标准偏差:SH3=0.51,SL3=0.28。
4.4标准机(测量基准)导致的不确定度
标准机导致的不确定度,测量过程使用10 m的尺子,二级导轨,轨距误差为1 435 mm,ΔBE=0.2 ×1.435=0.287 mm,SL4=0.287 mm。
测试中使用0.02 mm/m水平校正标准铁轨平面,测量轨距1 435 mm,根据最大计算,取误差为0.028 7,计算不确定度的质量为SH4=0.028 7 mms,SL5=0.028 7 mm。
4.5合成标准不确定度
每个不确定度都是独立的,不存在互换,然后合成不确定度:

相关数据可以考虑到计算中:SH=1.2,SL=0.61。由此可以得到接触线的高度,并使合成的不确定度达到3 SHS和3 SLS分别小于5 mm,测量系统精度误差可以达到±5 mm。
5 结论
本文提出了基于距离传播机,角度传播机,位移传播机及单立柱的CCD摄像头和嵌入式数据处理技术的铁路网参数的激光测量系统。和国内当前常用的测量方法相比,该测量系统测量速度快,精度可达±5 mms,且所有测量的参数可以自动生成电子报表[8]。该测量系统被广泛应用于铁路网的日常检修和维护,可以保证快速转速。该系统中,CCD摄像头进行二维测量,操作简单,便携性好,高精度的轨道偏差。与传统的吊弦测量方法相比,该系统中测量仪使用激光束代替吊弦,光电目标来代替钢尺,模拟显示代替人工读数,使铁路网参数测量更方便易行,同时还提高了测量精度和工作效率。实践中,证明了本系统中,提出的新的激光CCD仪器在实际测量中完全满足使用要求。
[1]Wu Changbo,Zhou Hong.The On-Line Real-Time Detection And Broken Line Accident Early Waring System on Railway Catenary Cable Stress Load[J].Micro Computer Information,2009,25:102-103.
[2]于万聚.高速电气化铁路接触网[M].成都:西南交通大学出版社,2003:128-129.
[3]Rong-guang D I.Study on Catenary Dynamic Parameter Measurement of High-Speed Railway[J].Technology Square,2005(1):90-92.
[4]Wu Jian,Zhang Hua.A Design of Railway Cable’s Multi-Parameter Measurement[J].Micro Computer Information,2008(10):47-50.
[5]巩浩.接触线几何参数双目视觉测量系统研究[D].山东:青岛大学,2012:8-9.
[6]陈忠斌,周燕芳.便携式接触网几何参数激光测量仪的研制[J].传感器与微系统,2013(4):23-25.
[7]吴健;张华.接触网多参数测量仪设计[J].微计算机信息,2008(10):45-47.
[8]Zhou L.Thermal Error Compensation of a LED/CCD 3D Measuring SyStem[R].[sl]:Internal Report(K.U.Leuven),2002.
林邓伟(1972-),男,汉族,河南温县人,焦作大学副教授/硕士,主要研究方向为计算机科学技术,自动化,lindengwei@yeah.net。
EEACC:436010.3969/j.issn.1005-9490.2015.01.037
铁路接触网导线几何参数的激光测量系统
林邓伟*,李东亮
(焦作大学信息工程学院,河南焦作454000)
为了实现对接触网导线几何参数的实时、有效检测,从而确保铁路安全行驶,延长导线使用时间,提出了基于激光的铁路接触网导线几何参数的测量系统,该系统中应用了距离传感器,角度传感器,位移传感器,CCD摄像头和嵌入式数据处理技术。另外详细介绍了该系统的体系结构和测量原理的数学模型和误差范围,并对该系统的主要参数测量进行了分析和评估。与先前的测量结果相比,该测量系统可旋转方向,从而使铁路接触网的测量速度加快,测量精度可以达到±5 mm。
自动化技术及设备;测量技术;激光;铁路接触网;传感器;几何参数
TP2
A文献标识码:1005-9490(2015)01-0174-04
2014-01-13修改日期:2014-03-17
猜你喜欢
航空学报(2022年5期)2022-07-04
云南画报(2021年10期)2021-11-24
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
模具制造(2019年10期)2020-01-06
自动化与仪表(2019年2期)2019-03-06
数字通信世界(2019年1期)2019-02-14
西南石油大学学报(自然科学版)(2018年4期)2018-08-02
广西电力(2016年5期)2016-07-10
西南交通大学学报(2016年3期)2016-06-15
- 电子器件的其它文章
- The Implementation of CRC Algorithm Based on FPGA
- A Bandgap Reference with High Temperature Performance*
- The Relationship between Excessive Leakage Current,Large Thermal Resistance and Voids Rate*
- A Method of Bottleneck Detection of Semiconductor Assembly and Test Production Line*
- Suppression of Spurious Radiation of Patch Antenna Based on Microstrip Spiral-Defected Resonant Cells*
- An Ultra-Wideband Low Noise Amplifier Based on Noise Cancellation Technique*