
民用飞机ADIRS系统级需求研究
2015-10-09 20:24张辉
科技资讯 2015年18期
张辉
摘 要:ADIRS(Air Date& Inertial Reference System)在民用飞机上有着广泛的应用。ADIRS作为飞机上重要的A级系统,与飞机上其他系统有着复杂的交联关系。ADIRS将原先独立的ADS和IRS系统集成到一起,具有两套系统的全部功能(ADR功能和IR功能),而且两部分功能具有独立性,同时既可以节省飞机上的设备安装空间,又可以节省设备重量,具有良好的运营的经济性。从系统级对ADIRS需求进行研究就显得很重要。ADIRS的系统级需求从系统功能,系统精度,相关操作,安全性以及维修性等方面进行阐述。
关键词:民用飞机 ADIRS 独立性 系统级需求
中图分类号:V268 文献标识码:A 文章编号:1672-3791(2015)06(c)-0030-02
ADIRS一般包含三套或者三套以上ADIRU以及若干ADM,AOA,TAT以及全静压探头(或全压/机身静压孔)。ADM可以通过A429总线给ADIRU提供全压、静压、数据。飞机上ADM具体应配置的数量需根据大气数据系统的架构来确定。每套相同的ADIRU设备应该分为两个独立的部分ADR(Air Data Reference)和IR(Inertial Reference),每个独立的部分可以在另外一个失效的情况下,独立工作。ADIRU输出的大气及惯性基准数据可用于驾驶舱显示系统及自动飞行控制系统等,其中IR可与GNSS系统接口来提高组合导航数据的精度。
1 ADIRS功能
1.1 大气数据基准(ADR)功能
ADIRU中的大气数据基准部分应包含大气数据计算功能,并具备存储静压源误差修正(SSEC)参数并进行修正的能力,并能以A429总线的形式输出至少以下的数据信息。
- 计算空速
- 气压高度
- 修正气压高度
- 高度变化率
- 马赫数
- 真空速
- 最大空速门限
- 最大马赫数门限
- 总压
- 静压
- 动压
- 总温
- 静温
- 正驾驶场压修正高度
- 副驾驶场压修正高度
- 修正攻角
- 修正侧滑角
1.2 惯性基准(IR)功能
ADIRU的IR部分应能够在横滚和偏航轴以及±85°俯仰轴上进行全自由度操作。ADIRU惯性基准功能至少提供以下参数:
- 俯仰角
- 横滚角
- 航向(真航向和磁航向)
- 航迹(真航迹和磁航迹)(惯性/组合)
- 地速(北向地速/东向地速)(惯性/组合)
- 地速(惯性/组合)
- 纬度(惯性/组合)
- 经度(惯性/组合)
- 惯性高度
- 风速和风向
- 偏流角
- 飞行路径角(惯性/组合)
IR除了能够接受来自ADR的真空速(TAS,True Air Speed)以及高度变化率即垂直速度(VS,Vertical Speed)数据,还应能和ARINC743A GNSS传感器交联,接收GPS的经纬度以及Time Mark等参数信号,以提高IR输出参数的精度。IR最终计算出来的结果应通过ARINC429高速总线输出给其他系统,例如FCS,FRS,OMS等。
2 ADIRS性能指标
大气数据基准(ADR)性能指标
2.1 ADM性能指标
如果将大约47.5mb(绝对)到1900mb(绝对)范围内的压力施加到压力装置,则不应当损坏ADM;如果暴露在2900mb(绝对)压力环境下,且压力输入不大于950mb,则不应当损坏ADM。
在测试ADM的泄露速率的试验中,设定使用不超过2L的气体,在40000英尺的高度,每套压力输入(不包括相关的飞机管路,如果有的话)的ADM泄露速率不应当超过0.1mb/分。
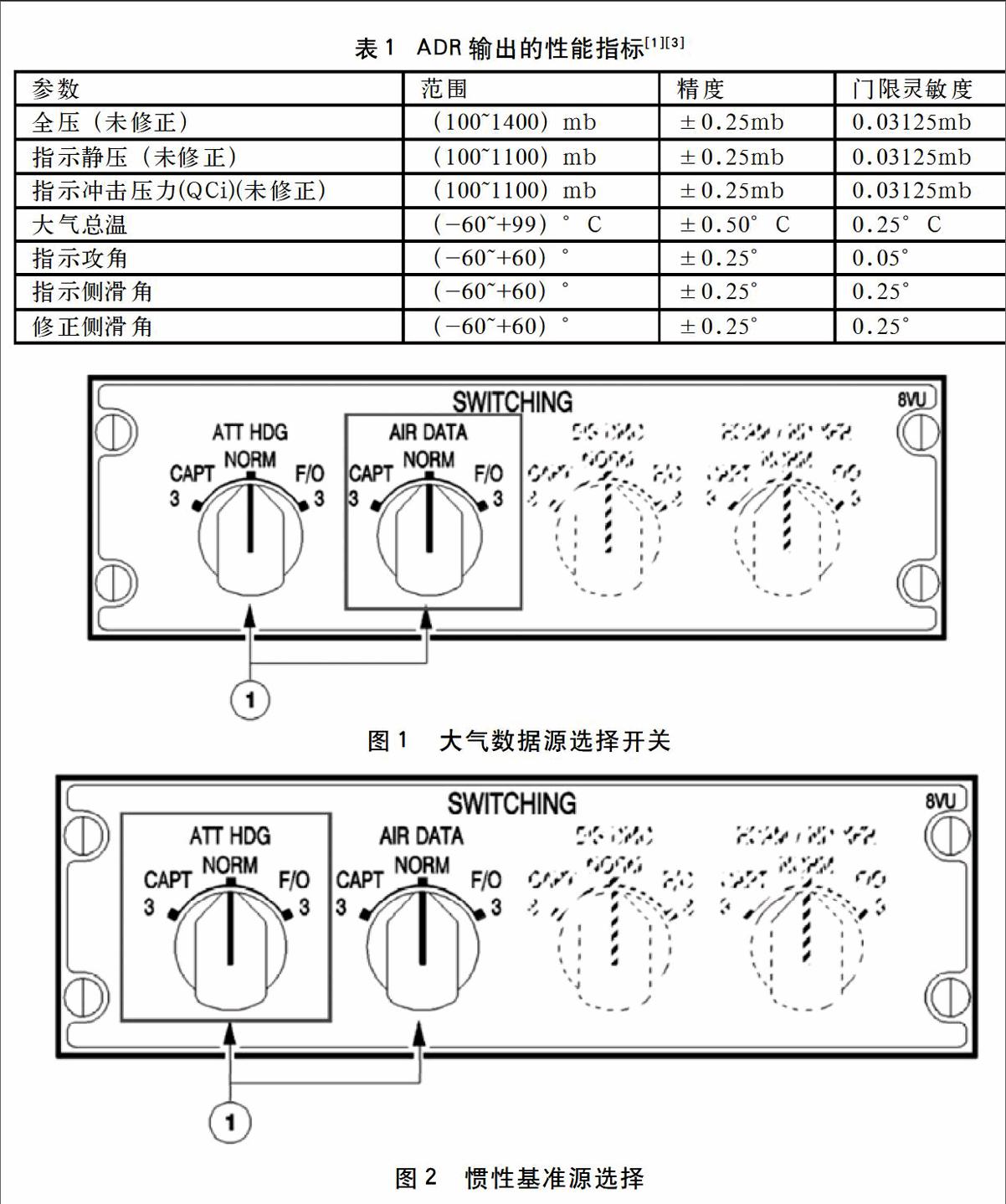
2.2 ADR输出参数性能指标
ADR输出参数的性能指标如表1所示。
2.3 惯性基准(IR)性能指标[2]
IR在外部环境温度高于0°C,且纬度在±70°之间工作,从加载电源到完成自动对准过程所需时间应小于10min。
IR输出应满足以下性能:
(1)位置(组合):25m(在有SA的情况下,100m)。
(2)位置(惯性):如果飞行时间在10小时内,则应满足2NMPH(95% CEP);如果飞行大于10小时,垂直航迹位置误差不应当超过±20NM(95% CEP),沿航迹±25NM(95% CEP)。
(3)磁航向精度(2σ):
50°S<纬度<50°N,Accuracy = 2.0°;
60°S<纬度<=50°S,并50°N<=纬度<68°N,Accuracy = 3.0°;
其他(82°S和82°N之间,除两极区域),Accuracy = 4.0°。
(4)姿态:0.5°(2σ)。
3 ADIRS相关操作
3.1 大气数据基准(ADR)相关操作
ADR相关操作包括以下操作:
(1)源选择开关(如图1所示,红框表识),通过此旋钮来选择正副驾驶的PFD上显示的大气数据相关的数据来源于哪套ADIRS。位于“NORM”位置时,正驾驶PFD显示数据来自第一套,副驾驶PFD显示数据来自第二套,第三套备用;位于“CAPT 3”位置时,正驾驶PFD显示数据来自第三套;位于“F/O3”位置时,副驾驶PFD显示数据来自第三套。
(2)气压修正旋钮,飞行员通过此旋钮来设置显示高度为标准气压高度或是修正了场压的修正气压高度。
(3)探头加热控制开关,通过此开关来控制大气数据探头加温。
3.2 惯性基准(IR)相关操作
惯性基准(IR)应提供下列操作模式:
(1)OFF:断开全部电路(控制电路除外)。
(2)ALIGN:该模式是自动的,但在某些飞机上可由操作人员选择。这个自给过程利用了外部即时位置输入,系统应以当地垂直和方位基准计算即时方位,并进行自测试和校准。
(3)NAV:如果对准成功,系统应当提供姿态、位置、速度输出,机体和欧拉加速度、角速率,以及合成磁航向。
(4)ATT:如果连续更新的导航数据(惯性基准垂直和位置)丢失,系统应当操作模式,仅提供飞机姿态输出、方向基准、加速度和角速率。磁航向降低到“自由”DG状态,由操作人员手动设置,修正漂移。
注:ATT模式(对某些飞机机型是可选的)为备用模式,其性能不亚于优质的垂直陀螺和方位陀螺。仅当设备故障或者飞行中电源故障引起惯性基准垂直和位置信息不可用时,才使用该模式。正常工作中不适用该模式。
IR数据源选择旋钮(如图2中红框标示所示),通过此旋钮来选择正副驾驶的PFD上显示的惯性基准相关的数据来源于哪套ADIRS。位于“NORM”位置时,正驾驶PFD显示数据来自第一套,副驾驶PFD显示数据来自第二套,第三套备用;位于“CAPT 3”位置时,正驾驶PFD显示数据来自第三套;位于“F/O3”位置时,副驾驶PFD显示数据来自第三套。
4 ADIRS安全性与可靠性
ADIRS系统应该满足飞机的FHA的失效状态等级以及可靠性要求。ADIRS为A级系统,失效概率达到10E-9,其软件的研制保障等级为DO-178B A级,硬件的研制保障等级为DO-254 A级,飞机一般有三套独立的ADIRS,单套的ADIRS的失效概率达到1E-4,其MTBF为10000h。
5 ADIRS维护性
为了确保不同制造商的设备具备可互换性,ADIRS设备应当严格遵守ARINC600。具体来说,设备应当满足ARINC600中关于尺寸、误差、手柄、冷却设施、以及重量和中心方面的要求,除了冷却口和前端紧固销位置,该装置应当遵循ARINC600中4MCU外形参数基本标准,冷却口和前端紧固销位置应适用于4MCU类型。
ADIRS相关的传感器AOA、TAT、空速管/机身静压孔均安装于飞机机头的两侧,具体的位置因飞机机头的形状而定。传感器布置在飞机外部,可达性较好,便于维护。
ADIRS设备的应提供数字化数据通信端口,以ARINC429格式与机载维护系统(OMS)进行数据通信,向OMS系统报告ADIRS系统的Maintenance Word以及设备状态信息,以便于在地面对设备故障进行定位,并及时进行ADIRS系统的地面维护。
参考文献
[1] ARINC 738A.AIR DATA AND INERTIAL REFERENCE SYSTEM (ADIRS),2001.
[2] ARINC 704A.Inertial Reference System,1999.
[3] ARINC 706-4.Subsonic Air Data System,1988.
猜你喜欢
中学生数理化(高中版.高二数学)(2022年6期)2022-06-30
军民两用技术与产品(2021年8期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
民用飞机设计与研究(2020年1期)2020-05-21
甘肃教育(2020年12期)2020-04-13
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
现代营销(创富信息版)(2018年10期)2018-10-12
天府新论(2016年6期)2016-11-23
电网与清洁能源(2015年5期)2015-12-29
