智能草坪修剪机器人设计
2015-09-21 02:44:10耿立明何麟鹏
电子测试 2015年16期
耿立明,杨 威,何麟鹏
(沈阳城市学院机电工程学院,辽宁沈阳 ,110112)
目前随着城市的发展,越来越多的场合地区需要绿化,草坪覆盖率逐渐提高,在绿地的维护作业中,要消耗大量的劳动强度和成本,迫切需要割草机器人等智能机器的技术推广。
1 系统组成
本智能机器人的电路系统包括电源管理模块、单片机模块、驱动模块。剪草方案使用扇叶状螺旋剪刀。由单片机控制机器人的前进轨迹。设置一个探测水平高度,使用超声波检测模块,如果前方草坪高于这个高度,则机器人直线前进,进行剪草。当前方水平高度低于或等于设置的高度(如平地),则向右旋转测量高度,如果右侧高度也高于设定高度,则前进一个身位,再次向右旋转,然后前进重复前进过程,当下次走到边界时,进行左转,反复呈蛇形轨迹前进,我们将一个周期称为行为A。当四周都高度都低于设定值时,机器人停止工作并发出提示音。该设备同时配有颜色识别模块,判别颜色区域在#02ffaa、#60ff88、#ffbf00、#ffb259区域内,当识别的颜色不在该颜色区域范围内时,小车会原地旋转进行检测,如果检测到了,将实施行为A,如果旋转一周之后仍没检测到,小车将原地停止。
2 硬件组成
割草机器人由控制模块,传感器模块,移动模块,割草模块等四个部分组成。
控制模块功能:主控模块选择STC12C5A60S2单片机,其运行速度快,抗干扰能力强等优点极其适用于本智能剪草机器人。将获得的数据与自身的数据库做比较,并参照路径规划对移动机构和割草机构发出修正指令,以获得稳定的运行情况。
驱动模块:L289驱动板内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载。
传感器模块:实时监测外界环境变量、移动机构及割草机构运行参数,并将结果输送到控制系统。
移动模块:采用三轮小车为本体,后轮用两个不同的直流电机驱动,前轮为起导向作用的万向轮,在车体前端搭载了个的高速电机控制割刀,能形成宽左右的切割区域,割刀的最大特点是可将割下来的草茎粉碎成以下的碎草沫,形成天然的肥料再释放回草坪中去。
颜色识别模块:判别颜色区域在#02ffaa、#60ff88、#ffbf00、#ffb259区域内(待定)、当识别的颜色不在该颜色区域范围内时、小车会原地旋转进行检测、如果检测到、将实施行为,如果旋转一周之后仍没检测到,小车将原地停止。
低智能的割草机器人只依据设定的轨迹进行工作,不具备动态分析外部环境的能力,中等智能的割草机器人则依照某种策略绕过障碍物,但不能保证完全覆盖除障碍物以外的其他所有区域,剩余未割草坪由人工修整高智能的割草机器人能直接建立工作区间的地图,具备路径自主规划和决策的能力,无需任何外部因素干预即可实现割草区域的完全遍历。
单片机模块采用stc16C5260S单片机。高度探测器4采用红外探测器。草坪边界探测器采用超声波探测器或GY-31TCS230 TCS3200颜色传感器。
本具体实施方式由单片机控制机器人的前进轨迹。设置一个探测水平高度,如果前方草坪高于这个高度,则机器人直线前进,进行剪草。当前方水平高度低于或等于设置的高度(如平地),则向右旋转测量高度,如果右侧高度也高于设定高度,则前进一个身位,再次向右旋转,然后前进重复前进过程,当下次走到边界时,进行左转,反复呈蛇形前进轨迹,当四周都高度都低于设定值时,机器人停止工作并发出提示音。
本具体实施方式的整个电路系统主要由检测、控制、驱动三个模块组成,首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动,从而实现在无花坛的草坪上实施自动剪草功能。
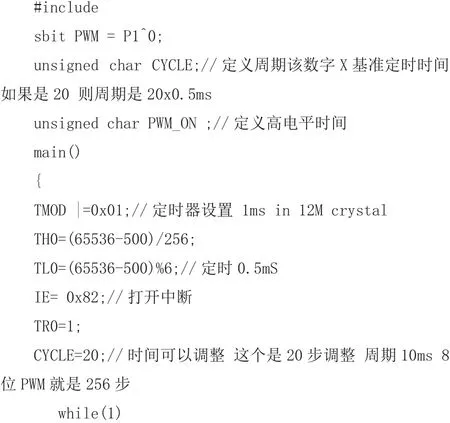
3 PWM调速程序编写
4 结论
割草机器人具有节约人力成本,环保等特点。
控制系统的关键部件是实现自主执行任务的自主机器人割草机割草,根据特定的任务与低成本战略,建立一套独立的电机控制芯片处理系统是必要的。
[1]赵满全,刘伟锋,赵士杰,佘大庆,刘汉涛,王永清.前置式双圆盘割草机的研制与试验[J].中国农机化.2004(05)
[2]覃柯,孙茂相,孙昌志.动态环境下基于改进人工势场法的机器人运动规划[J].沈阳工业大学学报.2004(05)
猜你喜欢
电子制作(2019年13期)2020-01-14 03:15:28
小学生必读(低年级版)(2019年5期)2019-08-30 03:22:26
电子制作(2019年15期)2019-08-27 01:12:10
电子制作(2019年9期)2019-05-30 09:42:02
家教世界(2017年8期)2017-06-21 10:44:45
少儿科学周刊·儿童版(2017年2期)2017-03-29 21:38:30
孩子(2016年4期)2016-04-13 12:41:29
少儿科学周刊·儿童版(2015年11期)2015-12-17 03:39:38
儿童绘本(2015年8期)2015-05-25 17:55:54
电子设计工程(2015年15期)2015-02-27 12:07:30