电子节气门复合控制方法研究
2015-09-21 07:14:46李学军马玉静杜丽敏
长春大学学报 2015年10期
李学军,马玉静,杜丽敏
(长春大学电子信息工程学院,长春130022)
0 引言
目前基于扭矩需求的发动机控制主要是通过电子节气门控制系统控制空气流量达到扭矩需求的控制要求,即电子节气门控制系统根据脚踏板的位置信号、当前工况下整车的扭矩需求精确地算出节气门的开度,控制电机快速驱动节气门开启并准确、平稳地达到节气门开度。在电子节气门控制中,PID算法[1]是当前常用的控制算法,该算法计算成本低,易于实现,但其控制精度受到节气门机械结构的非线性和磨损等的影响而达不到精确控制。文献[2]提出基于近似模型的控制算法,并针对模型的误差等不确定性采用鲁棒滤波方法给予补偿。文献[3]采用输入整形技术对跟踪信号滤波,基于Backstepping方法的电子节气门非线性控制器设计,对模型参数变化、空气流量等不确定性具有鲁棒性。文献[4-5]基于所制定的电子节气门控制策略设计了智能PID控制器,进行了电子节气门的阶跃响应试验和电子节气门的跟随响应试验,改善了电子节气门的随动性和稳定性。文献[6-7]则给出了基于前馈-反馈的复合控制器的设计。文献[6]中的前馈控制器为逆模型控制器,反馈控制器为PID控制器,用于补偿逆模型的建模误差。文献[7]的反馈控制器则根据节气门开度误差和变化率设计的控制规则补偿前馈控制的不足,以PWM为输出的控制信号控制节气门开度跟踪输入变化。本文提出基于PID的复合控制方法设计控制器控制电子节气门开度,其中前馈控制以目标开度为输入,采用发动机控制常常采用的MAP图控制方法,将目标开度与通过试验事先确定的初始电压信号制成MAP图表用于输出调用,以加快跟踪控制的速度。反馈控制采用PID算法以达到精确控制的目的。通过仿真实验表明,该复合控制方法能快速、准确的控制电子节气门的开度跟踪目标开度。
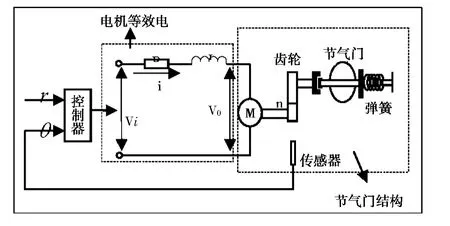
图1 节气门的组成
1 电子节气门控制模型
电子节气门一般由12V直流伺服电动机、减速齿轮、复位弹簧、节气门阀片等机械结构和检测节气门开度的位置传感器组成,其结构示意图如图1所示。节气门开度控制是通过控制系统输出的控制信号控制直流伺服电动机的电压来实现的。直流伺服电动机的等效电路如图1所示,其中Vi为输入电压,Vo为电机反电动势,R为电机回路总电阻,i为回路电流,L为直流电机回路电感,根据基尔霍夫定律,得到回路电路微分方程:

电枢两端反电动势Vo正比于电机转轴的角速度θ0:

k0为电机反电动势系数。
由于电子节气门是一个低通系统,且L数值很小,可忽略电感对回路的影响,由(1)式得:

根据动力学原理,电机输出转矩T0为:

K电机扭矩常数,J节气门转动惯量。经传动比为n的减速齿轮组减速后,将(3)式代入(4),得到输出扭矩为Tj:

电机转角θ0与节气门转角θ的关系为:

节气门旋转角θ在减速齿轮组扭矩、复位弹簧阻力距和摩擦阻力矩作用下,气动力学关系如下:

式中Tr为复位弹簧阻力矩,与弹簧的弹性系数和节气门的初始开度θi和旋转角有关:

Ttf为节气门摩擦阻力矩,包括库伦摩擦和粘性摩擦2种,即:

Kv粘性摩擦系数,Kc库伦摩擦系数,将(5)、(6)、(8)和(9)式代入(7)得到:

为方便设计控制系统,定义活塞位置控制系统的状态变量为:x=θ[]T,输入控制量为Vi,输出是节气门转角θ,得到状态模型:

2 复合控制器设计
控制电子节气门的目的是实现节气门阀体快速准确的打开。本文采用基于前馈和反推复合控制的方法设计控制器来控制电子节气门的开启动作。复合控制系统结构图如图2所示,其中θr为理想(待跟踪)开度,θ为节气门实际开度。

图2 控制策略
复合控制的工作原理是接收到理想开度信号后,由前馈控制器送出初始电压信号Vinitial控制直流电机转动带动节气门快速达到目标开度,同时检测实际开度,若精度不能满足误差要求(通常情况下节气门开度误差要求控制在绝对误差5%范围内),则由PID控制器输出精确的反馈控制信号,控制电机转动达到理想的开度控制目标,这时电机保持不动直到接收下一个给定信号,开始新一轮的控制。采用复合控制除具有控制实时性好、精度高。
2.1 前馈控制器设计
(10)式中的Kv、Kc等特性参数会随着时间的变化而变化,无法采用计算的方法确定,可采用发动机研究常用的实验方法得到。对应电子节气门的每个目标开度,都有一个事先确定的适当的初始电压信号Vinitial,将这些信号量制成MAP图表存到节气门控制系统的内存中,作为输出信号便于调用。基于实验得到的前馈控制律如表1所示,其对应的关系曲线如图3所示。

表1 不同目标开度的前馈控制律

图3 电子节气门开度与输出电压信号关系
2.2 PID控制器设计
由于节气门具有非线性、不确定等特性,仅采用前馈控制无法精确地跟踪目标开度,需要有反馈控制器进行补偿。本文反馈控制器的设计采用PID控制器实现电子节气门的精确控制,使控制系统具有尽可能好的暂态过程和稳态响应。控制器模型如下式:



表2 基于周期的QDRR参数整定
3 仿真分析
通过查阅文献和实验对模型参数校验,得到电子节气门的物理参数,输入电压vi为12V,减速齿轮传动比n取值22,电枢回路电阻Ra为2.8Ω,节气门静态时的开度θi为0.116rad,库伦摩擦系数kc为0.005N·m,滑动摩擦系数B为0N·m·s,开度转换系数δ为63.7%/rad,弹簧弹性系数为3.89×10-4N·m/rad,粘性摩擦系数kr2为3.3×10-4N·m/rad,粘性摩擦系数Kv为0.139N·m,电机反电动势系数k0为0.016V/(rad/s),电机扭矩常数k为0.016N·m/A,电机转动惯量J'是4.0×10-6Kg·m2,电枢电感L为1mH。
基于Matlab/Simulink建立控制系统仿真模型,其结构如图4所示。控制器为复合控制器,输入信号为正弦信号,电子节气门的Simulink仿真模型如图5所示。
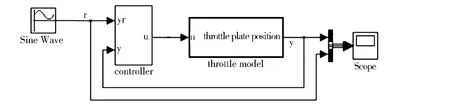
图4 仿真模型结构
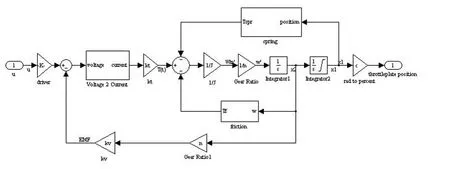
图5 电子节气门的Simulink仿真模型
取控制量为0,控制周期2ms,验证建立数学模型的正确性。输入幅值为25的阶跃信号,系统响应如图6所示。由图可知待控制系统存在稳态震荡,这是由于模型中存在状态变量的符号函数项。

图6 零控制输入的系统输出响应
根据驾驶员踩加速踏板的习惯,其输入正弦信号频率约为1-3Hz。本文取3HZ的正弦信号作为输入信号,仿真验证电子节气门控制系统跟踪正弦信号的能力。前馈控制策略采用MAP参数,PID控制律由kc=30,Tc=1.6s确定。正弦输入信号的幅值为10,频率为3Hz,系统响应如图6所示。从仿真结果可以看出,输出跟踪输入延时为0.18ms,最大误差发生在第一个峰值处,随后跟踪上输入信号,达到了较好的跟踪效果。

图7 输出响应曲线
4 结语
基于电子节气门控制在发动机控制中的重要作用,建立了控制用电子节气门数学模型,设计复合控制器控制节气门的开度。采用实验方法获取前馈控制律,控制直流电机转动带动节气门快速达到目标开度。反馈控制器则根据实际开度和理想开度的差,基于PID得到控制信号,精确的控制节气门开度。通过仿真结果可以看出本文方法能满足响应速度和控制精度的要求。
[1]Mohd.Khair H.,Aishwarya.K..Design a PID Controller for a Constant Speed of Combustion Engine[J].Australian Journal of Basic and Applied Sciences,2011,12(5):1586-1593.
[2]YUAN X F,WANG Y N.A novel electronic-throttle-valve controller based on approximate model method[J].IEEE Transactions on Industrial E-lectronics,2009,56(3):883-890.
[3]陈虹,胡云峰,郭宏志,等.基于backstepping方法的电子节气门控制[J].控制理论与应用,2011,28(4):491-496.
[4]冯巍,程秀生,祁鹏华等.基于智能PID控制的电子节气门控制系统研究[J].汽车技术,2009(3):14-17.
[5]毕超宇.基于Simulink的电子节气门控制逻辑仿真[J].现代工业经济与信息化.2013,46(4):70-72.
[6]盛旺.汽车电子节气门的前馈反馈复合控制器设计[J].机械设计与制造,2009(2):237-239.
[7]戴能红,蒋元广,段俊强.电子节气门的前馈-反馈复合控制器的开发[J].小型内燃机与摩托车,2011,40(4):6-10.
猜你喜欢
遥测遥控(2022年1期)2022-02-11 08:01:40
科学与财富(2021年33期)2021-05-10 16:54:38
北京汽车(2021年2期)2021-05-07 03:56:26
电站辅机(2021年4期)2021-03-29 01:16:52
汽车维护与修理(2019年3期)2019-08-08 02:29:02
汽车维护与修理(2018年19期)2018-04-28 01:21:40
汽车维修与保养(2015年1期)2015-04-17 03:25:34
电测与仪表(2015年21期)2015-04-09 11:52:14
汽车零部件(2014年5期)2014-11-11 12:24:30
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:03