基于模糊逻辑算法的纯电动客车起步加速能力优化与再生制动控制
2015-09-19 08:10:29胡坚耀吴正斌邓先泉全颂华
集成技术 2015年1期
胡坚耀吴正斌邓先泉全颂华
1(中国科学院深圳先进技术研究院电动汽车研发中心 深圳 518055)
2(深圳市五洲龙汽车有限公司 深圳 518116)
基于模糊逻辑算法的纯电动客车起步加速能力优化与再生制动控制
胡坚耀1吴正斌1邓先泉2全颂华2
1(中国科学院深圳先进技术研究院电动汽车研发中心 深圳 518055)
2(深圳市五洲龙汽车有限公司 深圳 518116)
日益严重的环境问题促使城市交通向着清洁、高效和可持续的方向发展,同时也促进了新能源交通技术的推广和应用。随着电池和电机驱动技术的发展,纯电动客车也受到越来越多的关注。起步加速能力和可再生制动是纯电动公交车区别于传统内燃机车的两个方面。由于加速踏板信号响应与驱动电机响应较快,理论上纯电动客车的加速性能要优于传统内燃机车。再生制动是一种降低能耗、提高续驶里程的重要技术手段。文章基于模糊逻辑算法,设计了驱动扭矩控制策略对驱动工况下的纯电动客车起步加速能力进行优化。同时,针对纯电动客车制动工况设计了能量回收策略。结果表明,驱动扭矩控制策略可使纯电动客车起步加速时间从 19.7 s 减小至 19.25 s,制动能量回收策略在中国典型城市公交路况下使能量消耗减少 11%。
纯电动客车;加速性能;制动能量回收;模糊控制
1 引 言
随着技术的不断创新与突破,面对金融危机、油价攀升和日益严峻的节能减排压力,2008年以来,以美国、日本、欧盟为代表的国家和地区相继发布实施了新的电动汽车发展战略,进一步明确了产业发展方向,明显加大了研发投入与政策扶持力度[1]。从环保角度来看,电动汽车是零排放的市区交通工具,即使计入发电厂增加的排气,总量上也将使空气污染大大减少。从能源角度来看,电动汽车将使能源的利用多样化和高效化,达到能源的可靠、均衡和无污染利用的目的。电动汽车的发展将使集中考虑能源、环保和交通综合优化成为可能,而且,它对于促进高科技的发展、新兴工业的兴起以及经济的发展将产生深远的影响[2,3]。当前,我国纯电动公交客车发展迅速,对其研发投入也持续提高。各大汽车企业如五洲龙、比亚迪、京华、中通、安凯、天津清源等都在大力发展纯电动公交车。但由于纯电动客车电池成本高、续驶里程较短等原因,短时间内大规模商业化仍有许多亟待解决的课题。
电池技术至关重要,电机驱动技术、能量管理策略等的影响也不容忽视。电机及其控制系统是电动汽车的心脏,决定着车辆运行和再生制动的能力[4]。同样,设计合理而有效的整车控制策略能够优化动力源的运行效率,达到减少能耗、提高续驶里程等目的。近年来,模糊逻辑方法被成功引入到车辆控制和能量管理领域中[5],它可以通过与多种简单函数相结合,实现复杂汽车系统的非线性输入-输出关系。实践证明,模糊控制理论不依赖于被控对象的精确数学模型,同时又不拒绝有效的数学模型,用它来处理那些未定义或者难以精确建模的复杂过程,是一种非常有效的方法[6-8]。
加速时间作为汽车动力性三大指标(最高车速、加速时间、最大爬坡度)之一,对平均行驶车速有很大的影响。制动能量回收对降低纯电动客车能耗,改善其经济性能有十分重要的作用。纯电动客车的加速性能主要与电机性能有关,采用线性踏板驱动控制策略而没有充分考虑驾驶员对电机扭矩的需求,对动力性的提升并不明显[9-11]。电动汽车制动能量回收以及能量控制的研究尚处于起步阶段,电动汽车的再生制动系统、车辆制动动力学已进行建模[12-15],但再生制动系统仿真、实验模拟和综合评价等还有待深入研究。
本文就纯电动客车驱动控制与制动回收这两个关键技术,基于模糊逻辑方法,设计相应的控制策略。仿真结果表明,驱动控制策略有利于提升纯电动客车的加速性能,制动能量回收策略可提高能量效率,延长续驶里程。这两种策略可为整车控制器的设计提供参考作用。
2 理 论
2.1 电机驱动扭矩控制
在纯电动客车中,电机驱动系统一般由电机、功率转换器和电子控制单元组成。其中,电机是以磁场为媒介进行电能和机械能转换的电磁装置。在电动汽车驱动过程中,驱动电机作为唯一的驱动装置输出动力,将从储能装置中获得的电能转化为机械能从而驱动车轮。功率转换器在电子控制单元的控制下输出特定的电压和电流,以产生电机所需的转矩和转速。与内燃机相比,电机的优势是其在低转速时可以提供峰值转矩,而且其瞬时额定功率可以达到内燃机额定功率的2~3 倍,这些可以为车辆带来出色的加速性能,同时在减速或制动时还可以实现再生制动。当纯电动客车驱动时,整车控制器接受加速踏板信号、挡位信息等,按制定的策略输出驾驶员需求扭矩指令,最后由驱动电机转化为实际的转矩输出。加速踏板给出的信号与当前车速、路况、蓄电池当前储能状况有关,这些难以用一个准确的数学模型描述。因此,可运用模糊逻辑控制器来解决,并实现 MAP 图控制。
当电机转速小于电机基转速时,电机的基本需求扭矩

当电机转速介于电机基转速与最大转速时,电机的基本需求扭矩

2.2 能量消耗与续驶里程
对于纯电动客车,通常以 kWh/km 度量每单位距离所消耗的能量。实际上,对于配置蓄电池的电动汽车,度量蓄电池输出端所测定的原始能量消耗更为合理。蓄电池能量的定额一般以 kWh测定,即能容易按蓄电池容量计算出行驶路程。能量消耗是蓄电池端输出功率积分的过程,蓄电池的输出功率可表达为

其中,Pb为蓄电池的输出功率;v 为车辆的速度;Mv为车辆的总质量;g 为重力加速度;δ 为动力系中表征旋转组件效应的质量系数;fr为滚动阻力系数;i 为坡度;ρ 为空气密度;CD是表示车辆形状的空气阻力系数;dv/dt 为沿纵向车辆的线加速度;Af为车辆迎风正面面积。
蓄电池端的再生制动功率

续驶里程为纯电动客车动力蓄电池组两次充足电之间的总行驶里程。其影响因素有:行驶的环境状况、行驶规范、蓄电池的性能、滚动阻力与空气阻力消耗的能量、客车的总质量、辅助装置的能量消耗。其中,行驶的环境状况一般指气温的高低、风力的方向与大小、道路的种类与交通拥挤情况;行驶规范指预先确定的行驶速度与时间的变化关系图线,除使用多工况道路循环试验法外,单一恒速工况试验也是一种试验方法;蓄电池的性能参数有能量密度、额定容量、放电率、放电电流、放电深度、蓄电池内阻,电池组的一致性及环境温度也是影响电动汽车行驶的能量消耗和续驶里程的重要因素;客车的总质量越大,消耗的功率和能量就越高,它们之间呈线性比例关系,增加电动汽车的电池数量,一方面可以增加电动汽车的总能量储备和续驶里程,另一方面也大大增加电动汽车的总质量,又会增大电动汽车的能量消耗,降低电动汽车的续驶里程,这就涉及到动力驱动传动系统的最佳匹配问题;辅助装置一般指制动系统的空气压缩机、转向系统的油泵,还有照明、取暖、音响、通风、空调等,除空调外,该部分能耗占电动汽车总能耗的 6%~12%。
设电动汽车蓄电池充满电之后的总能量为E(kWh),则电动汽车的续驶里程 S 为


其中,e 为电动汽车行驶单位里程能耗;e0为行驶比能耗。
再生制动回馈测试可以通过三种方法:整车上的测试、惯性轮装置测试和直接用发电机试验。其中,直接用发电机试验是较为常用的方法。但电动汽车电机再生制动回馈因车型、结构形式、控制策略不同而不同,再生制动工况也变化各异,因此再生制动能量试验一般也只能提供整车设计参考。
2.3 模糊逻辑系统
模糊逻辑是 Lotfi Zadeh 在 1965 年提出,是从模糊集理论演化而来的多数值逻辑形式,可用来处理不精确和信息粒度。模糊逻辑控制策略本质上属于基于规则的控制策略,是将经典数理逻辑与模糊数学相结合,模拟人思维的推理和决策方式的智能控制方式[16]。模糊推理系统(Fuzzy Inference System,FIS)结构如图 1,它包含模糊化接口、数据库、规则库、决策单元和去模糊化接口。模糊化接口将输入的精确量转化成模糊量。数据库定义模糊集的隶属函数,从而建立模糊规则。规则库给出所需要的模糊规则,它是模糊控制器的核心,反映了如何处理一个特定控制问题的知识收集。决策单元在模糊规则的基础上进行推理,去模糊化接口将推理结果转换成输出的精确量。当前的模糊推理方法主要有 Mamdani方法和 Sugeno 方法[17]。本文使用 Mamdani 方法,它可以提高去模糊化过程的效率。
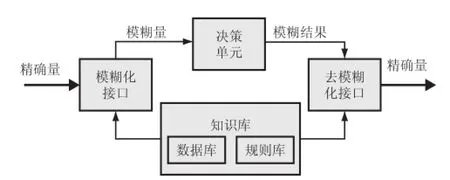
图1 模糊推理系统结构框图Fig. 1 Flowchart of FIS
3 仿真试验
本文研究对象为深圳市五洲龙汽车有限公司生产的纯电动客车 FDG6113EVG,如图 2 所示。

图2 纯电动客车Fig. 2 Battery electric bus
纯电动客车采用磷酸铁锂动力电池组,直驱式高比功率和大扭矩的永磁同步电机,高效低能耗的电动化辅助系统(电动空调、电动转向系统和电动供气系统)。车辆同时加入了五洲龙自主研发的运程信息监控平台,实现了车辆安全运行、及时维护和设计数据积累。客车及主要组件参数见表 1。图 3 为纯电动客车所用永磁同步电机的转速、扭矩、效率 MAP 图(只作出转速大于500 rpm 的状况)。
纯电动客车仿真试验按以下步骤进行:首先建立客车整车 AVL Cruise 仿真模型,然后在Simulink 中制定驱动扭矩控制策略及能量回收控制策略,最后进行 Cruise 传动系动力模型与Simulink 控制策略的联合仿真。

表1 纯电动客车参数Table 1 Specifications of battery electric bus
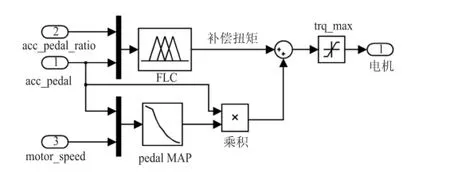
图4 驱动扭矩控制图Fig. 4 Block diagram of the torque control strategy
3.1 驱动扭矩控制策略
加速踏板开度在起步加速时反映驾驶员的起步意图。开度突然增大表明驾驶员希望驱动电机提供更大的起步扭矩,满足其急起步并期望加速到目标车速的要求。开度变动很小时,为了避免大的冲击并控制车辆的运行状态,驱动扭矩不应发生剧烈变化。驱动扭矩控制的简化结构框图如图 4 所示,该控制策略可以根据加速踏板开度及其变化率,确定驾驶员的驾驶意图,并根据模糊控制器确定驱动电机的补偿扭矩以满足起步加速的电机扭矩需求。图 4 中 acc_pedal 为加速踏板开度,acc_pedal_ratio 为加速踏板开度变化率,motor_speed 为电机转速,FLC 为模糊逻辑控制,pedal MAP 为一定电机转速下,加速踏板开度与电机驱动扭矩的变化图,trq_max 限定电机的最大扭矩。电机扭矩增加后,其信号对电机进行控制。该模糊控制器的隶属度函数如图 5所示。
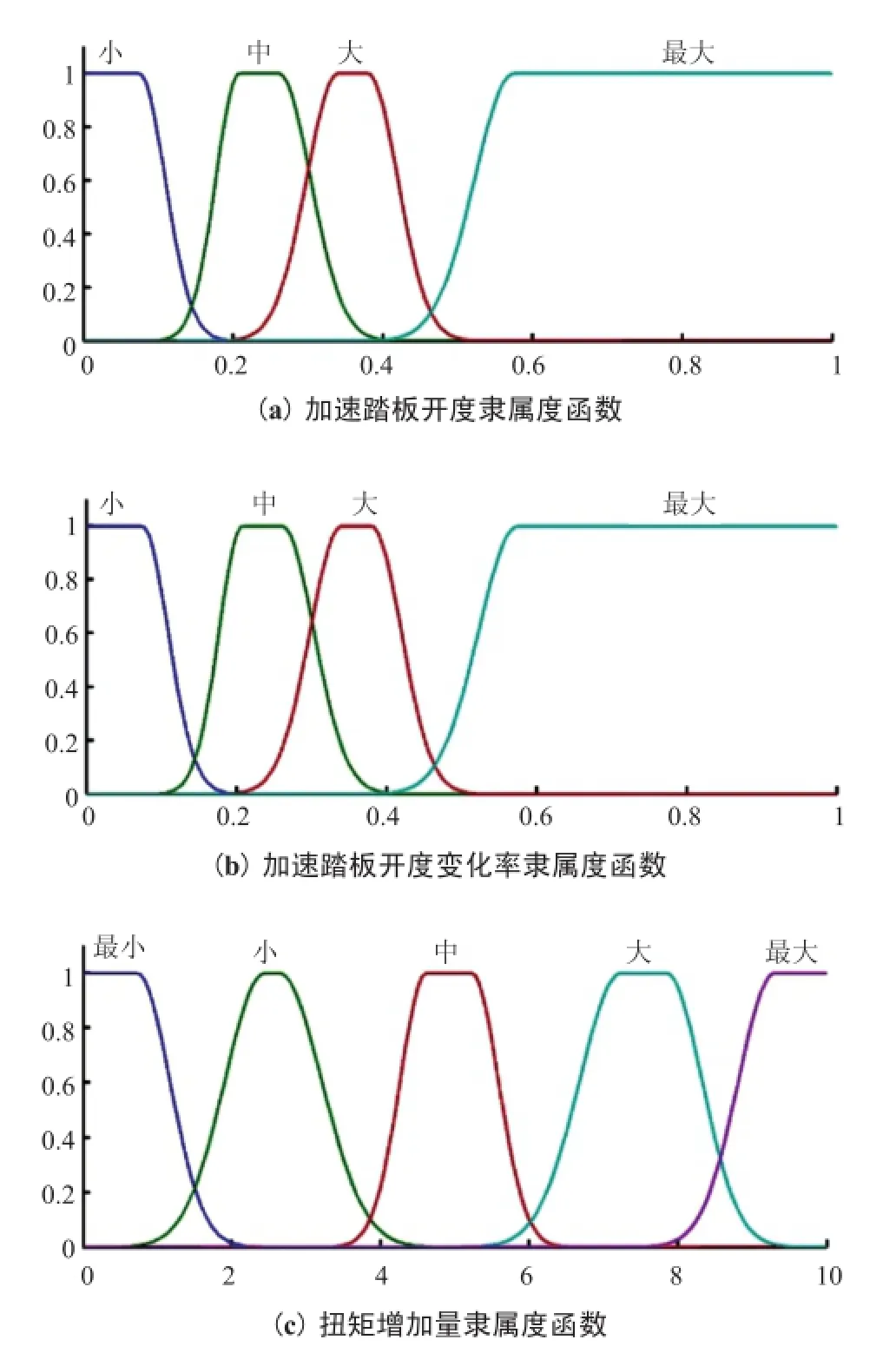
图5 驱动扭矩控制策略隶属度函数Fig. 5 Membership functions of the torque control strategy
在该驱动扭矩控制策略中,模糊控制器的输入量加速踏板开度与加速踏板开度变化率隶属函数范围被规范为 0 和 1 之间的一个数(0 代表踏板未被压下,1 代表踏板全部压下),都被分成小、中、大和最大 4 个等级。根据驱动电机的响应时间进行计算,扭矩增加量范围为 0~315 Nm,因此,该扭矩补偿量为 0 和 315 之间的一个数,此处论域设为 10,被分为最小、小、中、大和最大 5 个等级。该模糊控制器的模糊规则表如表 2 所示。
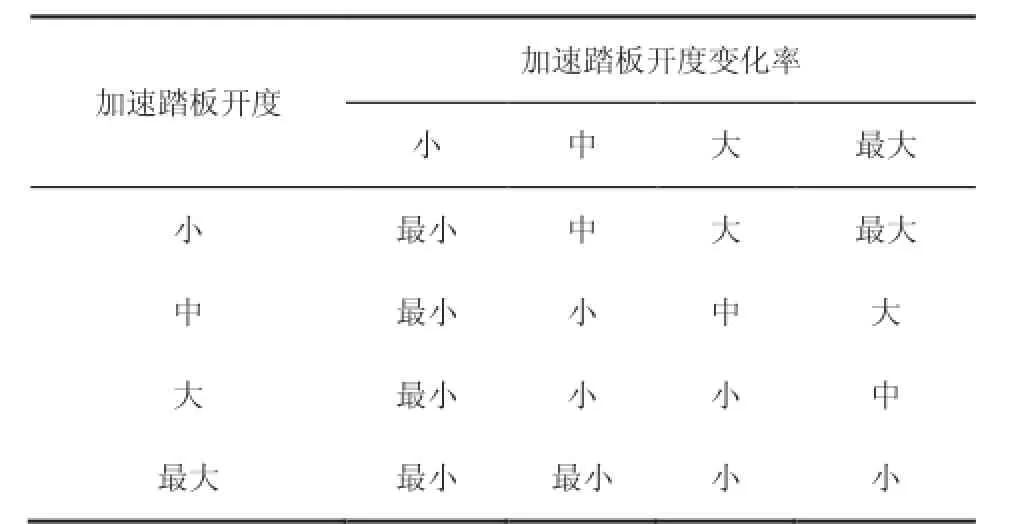
表2 模糊规则表Table 2 Fuzzy control rules
3.2 制动能量回收控制策略
传统汽车在踩下制动踏板使车辆减速或停止的过程中,车辆的动能经摩擦产生热能而耗散掉。电动汽车的制动系统结构是在传统汽车机械制动的基础上加上电制动系统。如果采取单一的电制动方式,车辆行驶的安全性并不能得到保证。采取双重制动相结合的方式,就需要制定制动力的分配系数,同时为制动能量回收控制策略提出要求。
对于电动汽车来说,当进行制动时,电机的作用就相当于发电机,把车轮的动能回收到蓄电池中,达到增加续驶里程的目的。此时整车控制器根据踏板信息、电机状态、电池荷电状态 SoC和车辆信息计算出制动减速度,根据相应的控制策略,进行制动回馈。电机的扭矩特性决定了可提供的电制动力的大小。扭矩越大,可提供的制动力越大,回收的能量越多;此外,制动时电机起到发电机的作用,其发电功率的大小,直接影响储能系统的充电功率,也就影响回收能量的多少。电机的工作温度及效率、蓄电池的充电功率也非常关键。
本文设计的制动能量回收策略如图 6 所示。策略中以当前车速和蓄电池荷电状态 SoC 作为模糊控制器的输入,根据输入来确定制动力分配比例系数 K。此后根据总制动力与当前的制动减速度来确定再生制动力,最后由电机回馈到蓄电池之中。当紧急制动时,为了保证制动的安全性,应采取机械制动。车速较低时再生制动小,车速增加时再生制动也相应增加。当前的电池 SoC较高时,为了保护电池,需减少再生制动力回馈比例。
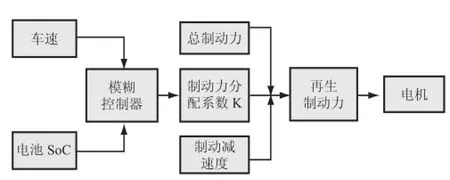
图6 制动能量回收策略框图Fig. 6 Flowchart of the regenerative braking control strategy
该制动能量回收策略中,模糊控制器的输入量当前车速、电池 SoC 和制动力分配系数被划分为小、中、大三个状态。其中,电池 SoC 和制动力分配系数的论域为 0 到 1,车速为 0 到 80。该模糊控制器的输入、输出隶属度函数示意图如图7 所示。制定制动能量回馈模糊规则时,在保证整车的安全性与舒适性的同时应回收较多的制动能量。根据大量的仿真试验,总结出模糊规则表如表 3 所示。当车速小、电池 SoC 小时,制动力分配系数小;当车速大、电池 SoC 小时,制动力分配系数大;当车速小、电池 SoC 大时,制动力分配系数小;当车速大、电池SoC 大时,制动力分配系数小。
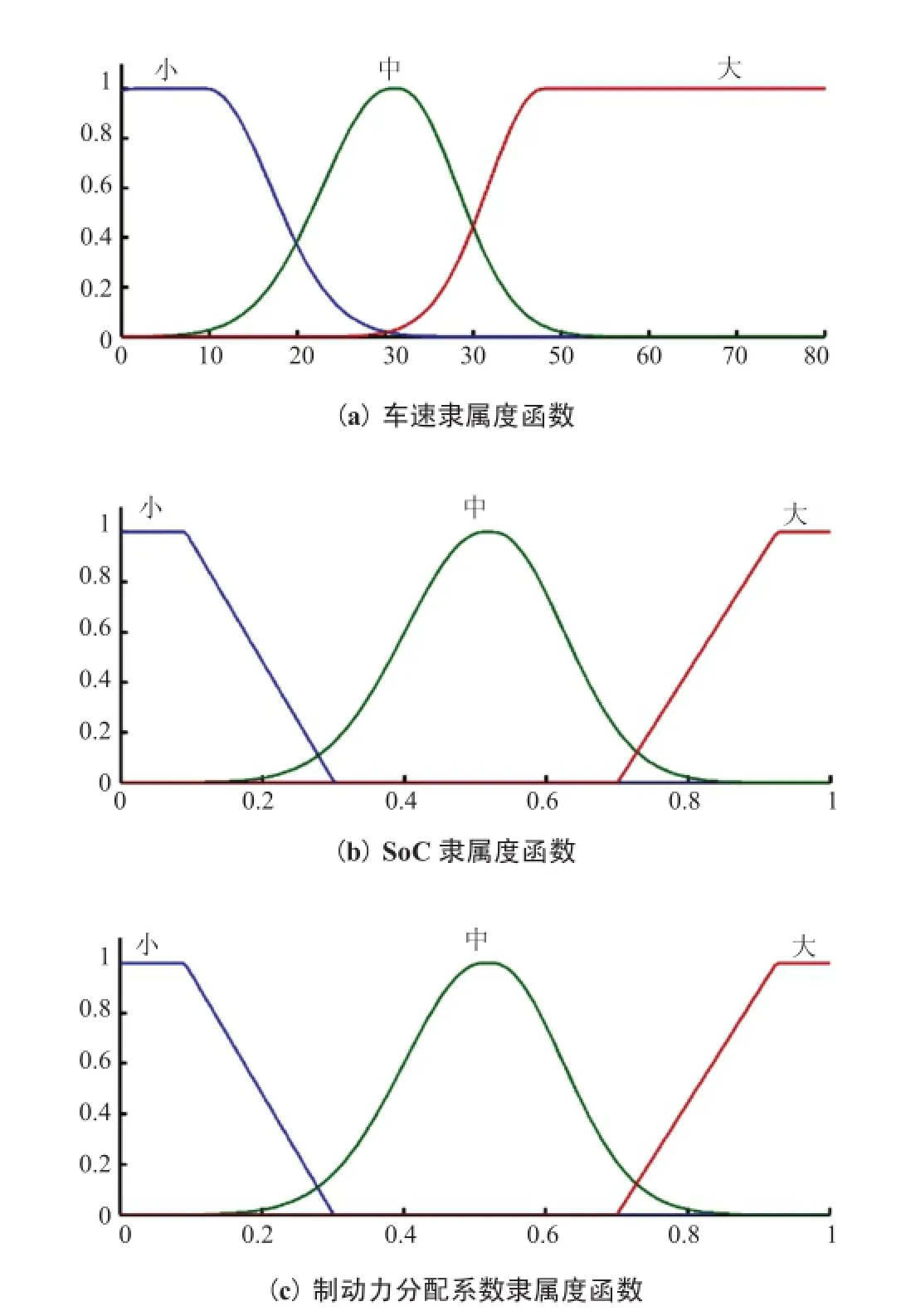
图7 制动能量回收策略隶属度函数Fig. 7 Membership functions of regenerative braking strategy

表3 模糊规则表Table 3 Fuzzy control rules
4 结果与讨论
4.1 驱动扭矩控制结果
图 8 中给出了不同电机转速(不同车速)下的加速踏板开度与电机扭矩关系图。图中实线为实车的实验数据,虚线为根据驱动扭矩控制策略仿真得到的仿真结果数据。实车测试时将电机转速设定在 200~2200 rpm,以观察加速踏板对电机扭矩的影响。由于篇幅关系,本文仅给出200 rpm、400 rpm 和 600 rpm 的数据,但分析结果对其他的电机转速同样适用。结果表明,在这三种电机转速下,驱动扭矩控制策略能够使电机扭矩增加,无论是实车扭矩数据还是通过驱动扭矩控制策略优化后的扭矩,都与加速踏板开度呈正线性关系。同时,在一定踏板开度下,电机的扭矩与电机转速成反比关系。文中所用电机的峰值扭矩为 2500 Nm。图 8 中驱动控制策略表明,当完全踩下加速踏板时(踏板开度 100%),电机的扭矩不超过 2500 Nm,这是控制策略中对电机扭矩进行了限制。

图8 不同电机转速下的加速踏板开度与电机扭矩图Fig. 8 Relationship between accelerating pedal and torque of motor at various speeds
表 4 中给出了 0~50 km/h 的起步加速时间值,其中包括实车实际测试结果(A),未施加驱动扭矩控制策略的仿真结果(B)和施加驱动扭矩控制策略的仿真结果(C)。由结果对比可知,驱动扭矩控制策略能使该仿真模型 0~50 km/h 起步加速时间提高 0.45 s。王佳等[9]的研究结果显示,在 0~40 km/h 加速时间下动力模式(3.8 s)比常规模式(4.8 s)提高了 1 s;周孟喜[11]的研究结果也显示,0~50 km/h 的加速时间从 7.3 s 提升了 0.8 s。由于这两处文献研究的对象都是小轿车,所以其加速提升时间比本文的纯电动公交车要大也较合理。

表4 0~50 km/h 加速时间表Table 4 Acceleration time from 0 to 50 km/h
4.2 制动能量回收控制结果
本文采用中国典型城市公交车行驶工况来检验制动能量回收控制策略的效果。图 9 为中国城市工况时间与速度、加速度关系,该工况的参数值如表 5 所示。

图9 中国城市工况Fig. 9 China city bus drive cycle
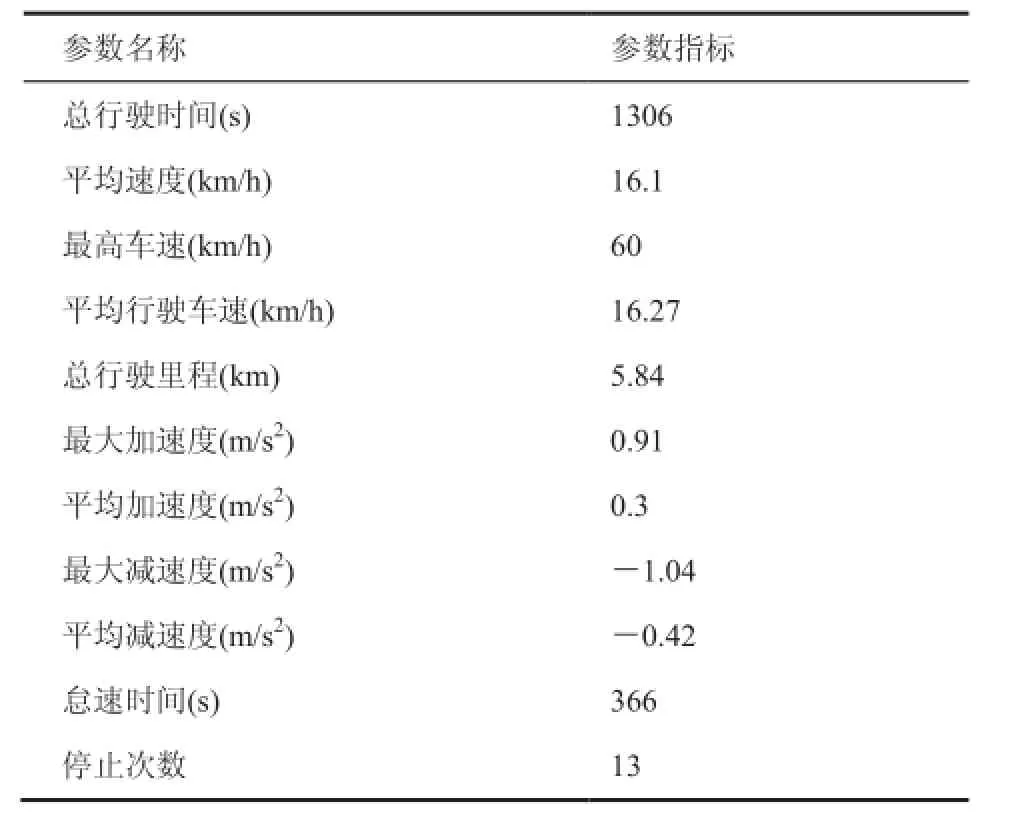
表5 中国城市工况参数表Table 5 Chinese city bus drive cycle parameters
为了节省计算时间,截取一段 380 s 的工况进行仿真,此工况有 5 个不同加减速循环,可以用来检验制动能量回收也有一定的代表性。图 10为该策略下的电机扭矩图。从图中可以看到,当纯电动客车减速时,电机的扭矩为负值,此时电机相当于充电机向电池充电。表 5 为该 380 s 工况下的 100 km 能量消耗。由于此 380 s 工况的最高车速不到 45 km/h,因此 100 km 能量消耗较少。从表 6 中可知,使用制动能量回收控制策略之后,能量消耗从 68 kWh/100 km 降低到60.49 kWh/100 km,能量消耗减少率为 11%。
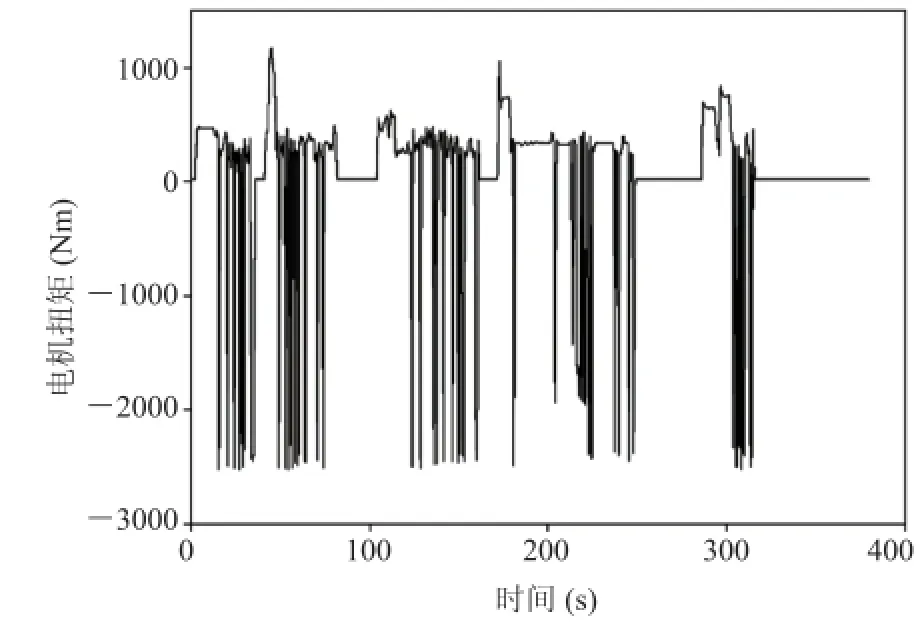
图10 电机扭矩变化图Fig. 10 Torque of the motor

表6 380 s 工况 100 km 能量消耗表Table 6 Energy consumption at 380 s road cycle
5 总 结
模糊控制算法是实现纯电动客车能量管理控制、优化的有效方法之一。文中所设计的驱动扭矩控制策略能够通过控制驱动电机的输出扭矩实现纯电动客车起步加速性能的提升。制动能量回收控制策略通过合理分配制动力,从而降低能量消耗。文中所设计的两种控制策略已在计算仿真上验证了可行性,将通过实车测试进行验证和进一步改进。
[1] 中华人民共和国科学技术部. 电动汽车科技发展“十二五”专项规划(国科发计(2012)195号)[EB/OL]. [2014-11-3]. 北京: 中华人民共和国科学技术部, 2012. http://www.gov.cn/zwgk/2012-04/20/content_2118595.htm.
[2] 陈清泉, 孙逢春, 祝嘉光. 现代电动汽车技术[M]. 北京: 北京理工大学出版社, 2004: 1-2.
[3] 王震坡, 孙逢春, 刘鹏. 电动汽车原理与应用技术[M]. 北京: 机械工业出版社, 2014: 2-3.
[4] Ehsani M, Gao YM, Emadi A. 现代电动汽车、混合动力电动汽车和燃料电池车——基本原理、理论和设计 [M]. 倪光正, 倪培宏, 熊素铭译. 北京: 机械工业出版社, 2008: 118-120.
[5] Zhang X, Mi C. 车辆能量管理: 建模、控制与优化 [M]. 张希, 米春亭译. 北京: 机械工业出版社,2013: 171-180.
[6] Tie SF, Tan CW. A review of energy sources and energy management system in electric vehicles [J]. Renewable and Sustainable Energy Reviews, 2013,20: 82-102.
[7] Hemi H, Ghouili J, Cheriti A. A real time fuzzy logic power management strategy for a fuel cell vehicle [J]. Energy Conversion and Management,2014, 80: 63-70.
[8] Solano MJ, Mulot J, Harel F, et al. Experimental validation of a type-2 fuzzy logic controller for energy management in hybrid electrical vehicles [J]. Engineering Applications of Artificial Intelligence, 2013, 26(7): 1772-1779.
[9] 王佳, 杨建中, 蔡志标, 等. 基于模糊控制的纯电动轿车整车优化控制策略 [J]. 汽车工程, 2009,31(4): 362-365.
[10] 王立国. 纯电动客车动力总成控制策略研究 [D].长春: 吉林大学, 2009.
[11] 周孟喜. 电动汽车驱动工况下的整车控制策略研究 [D]. 重庆: 重庆大学, 2012.
[12] Nian XH, Peng F, Zhang H. Regenerative braking system of electric vehicle driven by brushless DC motor [J]. IEEE Transactions on Industrial Electronics, 2014, 61(10): 5798-5808.
[13] Budde-Meiwes H, Drillkens J, Lunz B, et al. A review of current automotive battery technology and future prospects [J]. Proceedings of the Institution of Mechanical Engineering, Part D: Journal of Automobile Engineering, 2013, 227(5): 761-776.
[14] Bayar K, Biasini R, Onori S, et al. Modelling and control of a brake system for an extended range electric vehicle equipped with axle motors [J]. International Journal of Vehicle Design, 2012,58(2-4): 399-426.
[15] 汪贵平. 纯电动汽车驱动与制动能量回收控制策略研究 [D]. 西安: 长安大学, 2009.
[16] Kovacic Z, Bogdan S. 模糊控制器设计理论与应用 [M]. 胡玉玲, 张立权, 刘艳军, 等译. 北京: 机械工业出版社, 2010: 1-7.
[17] 王立新. 模糊系统与模糊控制教程 [M]. 王迎军译. 北京: 清华大学出版社, 2003: 75-76.
Acceleration Performance Optimization and Regenerative Braking Control for Battery Electric Bus Based on Fuzzy Logic Algorithm
HU Jianyao1WU Zhengbin1DENG Xianquan2QUAN Songhua2
1( Electric Vehicle Research and Development Center, Shenzhen Institutes of Advanced Technology,Chinese Academy of Sciences, Shenzhen 518055, China )
2( Shenzhen Wuzhoulong Motors Co., Ltd., Shenzhen 518055, China )
Increasingly serious environmental problems have prompted the city traffic to the clean, efficient and sustainable directions, and have also accelerated the popularization and applications of the new energy transport technology. With the development of the battery and motor drive technology, battery electric buses have drawn extensive concerns. Starting acceleration performance and regenerative braking capability are two advantages of battery electric bus compared to traditional vehicles. Because of quick responses of the accelerator pedal signal and drive motor, the acceleration performance of battery electric bus is superior to the traditional diesel bus theoretically. The regenerative braking is an important technique to save energy consumption and extend the drive range. In this paper, based on the fuzzy logic algorithm, we designed a driving torque control strategy for decreasing the starting acceleration time. Meanwhile,the regenerative braking control strategy is reported. The results show that, the driving torque control strategy can decrease acceleration time and the regenerative braking strategy can save energy consumption by 11% during the Chinese city bus driving cycles.
battery electric bus; acceleration performance; regenerative braking; fuzzy logic control
TG 156
A
2014-10-15
2014-11-4
国家新能源汽车产业技术创新工程整车项目(Y3Z0221001);广东省省院合作项目(2011B090300095,2012B09040018); 深圳市科技研发项目(CXZZ20130322161447244)
胡坚耀,博士研究生,研究方向为纯电动汽车和双能量源混合动力汽车的能量管理与优化控制;吴正斌(通讯作者),博士,研究员,博士生导师,研究方向为动力和储能电池系统集成和应用技术、新能源汽车动力系统和整车集成与优化技术,E-mail:zb.wu@siat.ac.cn;邓先泉,高级工程师,研究方向为整车集成与优化技术;全颂华,工程师,研究方向为新能源汽车动力系统优化。
猜你喜欢
客车技术与研究(2023年6期)2023-12-19 01:21:18
车主之友(2022年6期)2023-01-30 07:58:16
中国煤层气(2021年5期)2021-03-02 05:53:14
黄河之声(2019年23期)2019-12-17 19:08:43
汽车实用技术(2019年17期)2019-09-21 03:46:32
汽车观察(2019年2期)2019-03-15 06:00:52
汽车观察(2018年12期)2018-12-26 01:05:46
汽车观察(2018年10期)2018-11-06 07:05:32
凿岩机械气动工具(2017年3期)2017-11-22 07:21:50
北京汽车(2017年3期)2017-10-14 02:15:52