汽车主动巡航控制系统浅析
2015-09-10 07:22:44郭小兰
考试周刊 2015年92期
郭小兰

摘 要: 主动巡航控制系统又称为自适应巡航控制系统,系统包括雷达传感器、数字信号处理器和控制模块。本文主要介绍了ACC系统功能ACC系统组成及工作原理、控制器ECU及采用的PID调节方式。
关键词: 主动巡航控制系统 控制器ECU PID调节
主动巡航控制系统(Adaptive Cruise Control,自适应巡航控制系统)简称ACC,能够自动调节车速以保证与前车有足够的安全距离。它能实现汽车行驶过程的智能巡航控制,其防撞击雷达能自动测量自身车辆与前方车辆和障碍物之间的相对速度和相对距离,根据计算出的安全距离,对危险和危急的程度作出减速或制动的判断,并即时警示和实施控制操作[1]。
1.ACC系统的主要功能
ACC系统有四大功能:①测量前方车辆车距;②测量前方车辆车速;③测量前车位置;④选择跟踪车辆[2]。
ACC自适应巡航控制系统作为一种智能化自动控制系统,在定速巡航的基础上可以进行自动调节车速以保持安全距离,就是在原有的定速巡航系统的基础上加入可感应与前车距离的传感器,根据传感器反馈的信息,电脑自动控制油门和刹车系统实现自动加减车速,从而不但解放驾驶员双脚还能保证驾驶员的安全,在驾驶员设定好车速后,系统通过车头前方安装的雷达传感器进行车距确认;在前后轮毅上的轮速传感器,可测出车辆的行驶速度;方向角传感器可以判断车辆行驶的方向;发动机控制器和扭矩控制器则探测和调整发动机的扭矩输出,以提高发动机的动力性,并适时调整车辆的行驶速度,而各种控制器和传感器则统统由车内行车电脑进行控制。所以当前方车辆紧急减速或遇行人时,装有ACC系统的车辆在设定好车速后能够自动进行减速,可以提前介入进行制动[3]。
2.ACC系统工作原理
ACC是建立在以雷达测距、测速的基础之上的。雷达基本原理为物体表面会反射电磁波,反射回来的那部分电磁波就被当做是“回声”接收。雷达的调节过程同时考虑到摄像头数据、导航里程数据等,使得雷达的调节过程更准确和快捷[4]。
2.1ACC系统组成及控制原理
ACC系统包括雷达传感器、数字信号处理器和控制模块[1]。当前ACC的毫米波雷达常采用结构简单、成本较低、对近远目标探测皆有良好性能的调频连续波(FMCW)雷达体制。图1展示了FMCW雷达ACC系统的构成,包括雷达波发生器、天线、发送接收模块、信号处理模块、警示模块、加减速制动控制装置等。
射频发射接收前端是雷达系统的核心,微波传输以波导效率最高。前端的架构采用波导结构,还包括环形器、定向耦合器、线性VCO、調制信号源、平衡混频器和低通滤波器等微波器件。前端混频输出的中频信号送至后级数据信号处理。数据处理的目标消除非必要信号(如杂波)和干扰信号,并对经中频放大的混频信号进行处理,从信号频谱中提取目标距离与速度等信息。
2.2控制器ECU
控制器ECU是ACC系统的中央处理器,是系统的核心部分。它负责将传感器送来的数据(包括相对距离、相对速度)进行处理,然后按照控制算法进行计算,最后形成指令控制作动器工作。它主要包含目标车头的距离;车头距控制器,计算获得目标车头距的车速、加速度命令;车速控制器,决定制动器和节气门的工作。
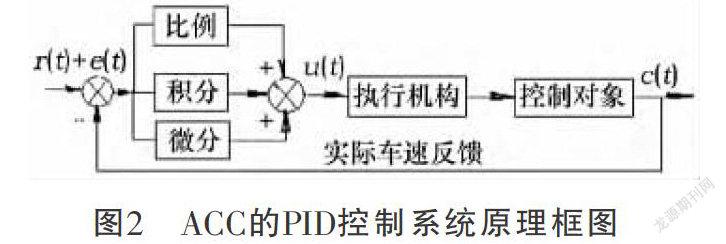
控制策略以采用PID(Proportion Integration Differentiation比例-积分-微分)的调节方式为多,图2绘出以物理参数为控制对象的PID原理框图,直观地表示出过程控制算法的环节。
PID的调节器需给出微分方程和传递函数,它将设定车速与实际输出值的偏差其比例作为控制量,以控制节气门开度,使车速迅速接近设定车速。考虑过程中偏差一直存在,积分部分把偏差积累起来加大控制量,以消灭偏差,使车速保持稳定。微分部分则起预估作用,当时,表示偏差在加大,应及时增加控制量,使减小;当时表示偏差量在减小,则减小控制量,以避免趋于0时,又向反方向发展而引起振荡。
3.结语
深入研究ACC系统的控制理论与方法,开发高效、实用的车辆ACC产品,将是今后我国在该领域的研究方向。未来的ACC系统将同其他的汽车电控系统相互融合,形成智能汽车电子控制系统。驾驶这种汽车只需在显示器中指明所要到达的目的地,汽车就会在卫星导航系统的指引下,借助公路两旁的电子标志牌,无需人为参与就可安全驶达目的地,实现完全的自动驾驶功能。
参考文献:
[1]陈天殷.大众CC自动巡航控制ACC工作原理浅析[J].汽车电器,2014.07.
[2]王振龙.大众车系主动巡航控制系统简介[J].汽车维修与保养,2013.07.
[3]何莉.浅谈电气自动化在汽车领域的应用[J].科技风,2014.06.
[4]刘春晖.2010年款奥迪A8自适应定速巡航系统[J].汽车电器,2014.07.