大众汽车推进电动车自动泊车和充电的研发
2015-09-10 20:37:44闻道
汽车之友 2015年22期
闻道
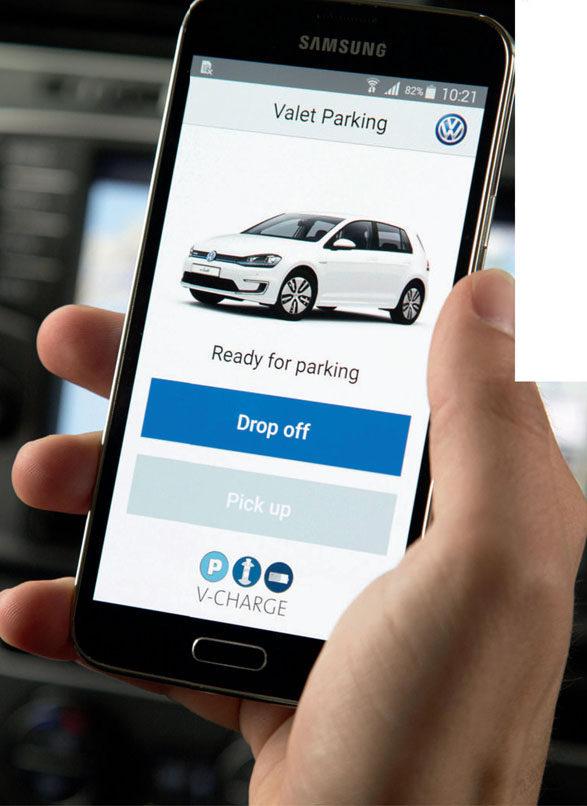

大众汽车致力于在自动泊车领域占据领先地位,V-Charge系统提供了在不久的将来自动泊车的图景。该系统是欧盟的研究项目,由来自德国和国际的六个合作伙伴共同开发新的技术,项目重点关注停车位的自动搜索以及电动车的充电。该系统的最大优点是,车辆不仅自动地寻找空车位,而且寻找具备充电设施的空车位,以对其电池进行感应式充电。充电完成后,系统自动将充电槽释放给其它电动车辆,而寻找普通停车位。V-Charge意即代客充电,它指明了自动泊车的未来发展方向。
在美国,方便的代客泊车大受欢迎:当你到达目的地便可下车,由代客服务人员为你停车,而当你需要开车时,服务人员再将车开过来,这样人们不再为寻找停车位浪费更多时间。V-Charge项目基于这一概念,其发展目标是在设定区域(如多层停车场内)完全自动地搜索停车位。
很多场景可以说明V-Charge概念的优势,以日常的实际情况举例:一个上班族发现他可能要迟到而错过公司的重要会议,有了V-Charge,他就可以在主要入口处直接停车下来,使用相关的智能手机应用程序,建立与其车辆的连接。通过全自动操作,车辆接收到数字地图,在停车区域或多层停车场内自动驶向停车位。车辆内集成的摄像头和超声传感器识别行人、骑车人和其它车辆,因此,车辆可以在称之为“混合交通”的区域穿行,选择的停车场不必是封闭的区域,也不需要任何复杂的技术设备。
当司机返回多层停车场时,他可通过V-Charge应用程序,呼叫车辆回到起点,车辆移动到设定的接人位置,而不需要司机走到停车区域或多层停车场。
测试车辆:技术感觉器官网络
主要的技术必要条件已经存在,例如在初始阶段,可以利用目前生产车辆中所使用的传感器和摄像头技术;传感设备组成的密集网络可实现基于大众汽车e-Golf的V-Charge测试车辆的自主操作;4个广角摄像头、2个3D相机、12个超声波传感器、数字地图以及用于车辆和基础设施通信的“Car2X”技术可确保车辆周围环境被可靠地检测和识别。识别行人、车辆和障碍,识别并测量停车位,然后将该数据流实时地组合在一起,形成整体图像,技术“感觉器官”必须完成的任务非常复杂,极为多样。
该研究项目所进行的持续测试显示,目前V-Charge已经可供使用。独立于GPS的室内定位、精确到厘米的停车位测量以及周围环境的360度识别都能可靠地运行,而系统对行人和车辆的反应以及考虑到按照或通过车辆路径进行交通移动的方式也能够有效工作。
2005年:被称为Stanley的大众途锐迈出自主操作的第一步
在大众汽车,自动驾驶已由想像转变为超前的研究领域。Stanley是加州的斯坦福大学与大众汽车电子研究实验室(美国)将途锐改装为能够自主驾驶的实验状况,它早在2005年即已荣获城市机器人汽车挑战大赛;2007年,帕萨特Junior进入开发新阶段,当时就已寻求在没有司机的情况下穿梭于城市丛林,正因如此成功,Junior在自主车辆的城市挑战赛中位列次席。
2011年,“eT-follow me!”微型面包车作为送货服务的理想车辆而推出。以现实生活场景举例:如司机沿街挨家挨户送信,而eT像一只训练有素的狗通过静态电动爪跟随他,确保他的邮袋不断装满(“FollowMe”功能),或者像好孩子一样静止等待,直到接收“come to me”的电子信号。
猜你喜欢
汽车实用技术(2023年10期)2023-06-14 07:13:06
汽车实用技术(2022年19期)2022-10-19 07:46:46
车主之友(2022年4期)2022-08-27 00:57:46
柴油机设计与制造(2022年1期)2022-06-20 08:44:48
汽车实用技术(2022年7期)2022-04-20 11:57:58
证券市场红周刊(2021年42期)2021-10-30 18:53:08
中国外汇(2020年11期)2020-09-10 07:32:14
军民两用技术与产品(2020年3期)2020-04-07 03:00:26
人民周刊(2017年17期)2017-10-23 09:13:28
中国汽车界(2016年1期)2016-07-18 11:13:35