
新型电子差速控制策略*
2015-09-04 07:00:02李帅魏东来于倩郭文涛
汽车工程师 2015年9期
李帅魏东来于倩 郭文涛
(1.辽宁工业大学汽车与交通工程学院;2.大连装备制造职业技术学院)
当汽车行驶在不平路面、转弯或超车时,其驱动轮行驶的距离和转速各不相同。传统汽车可以通过机械差速器来完成协调工作[1];而独立驱动电动汽车各驱动轮相互独立,驱动轮协调工作即由电子差速控制系统完成。基于驱动轮转矩、转速易于测定的优势[2-4],对驱动轮进行直接转矩控制的思想被带入电子差速控制,在解决差速问题的同时进一步提高了车辆的稳定性[5-7]。文章首先确定电子差速整车控制策略;然后设计理想横摆力矩计算模块,并设计模糊控制器控制驱动轮转矩,实时跟踪理想横摆角速度,以提高汽车转向时的安全稳定性,最后进行了仿真验证。
1 电子差速整车控制策略
两轮独立驱动电动汽车电子差速控制策略,如图1所示。信号采集处理层负责采集数据,计算实际和理想的横摆加速度;驱动力分配层根据实际和理想横摆角速度的差值进行附加横摆力矩分配,并将横摆力矩值变化为实际的驱动力矩值。执行层负责将调节力矩对驾驶员力矩进行调节,以使汽车能够按照驾驶员意图进行差速行驶。
2 参考模型
为研究整车的运行状态,文章选用能够较好反映车辆行驶状态和稳态响应好的线性二自由度车辆模型,如图 2所示,其方程如式(1)和(2)所示。
式中:m——汽车质量,kg;
Cf,Cr——前后轴的侧偏刚度,N/rad;
δ——前轮转角,(°);
Iz——汽车转动惯量,kg·m2;
a,b——汽车前后轴至质心的距离,m;
Vx,Vy——纵横向车速,km/h;
ω——横摆角速度,rad/s;
β——质心侧偏角,(°)。
横摆角速度计算公式,如式(3)所示。
式中:K——稳定性系数:
L——两轴的轴距,m;
ωd——横摆角速度稳态值,rad/s。
由于二自由度模型不能满足附着极限情况下车辆稳定状态的要求,因此要确定参考值的临界值作为期望值。其临界值计算式,如式(5)所示。
式中:ωbound——期望横摆角速度,rad/s;
μ——路面附着系数;
g——重力加速度,取9.8 m/s2。
3 模糊控制器设计
电动汽车电子差速的控制方法有很多,其中比较成熟的有PID控制和模糊控制[8-9]。PID控制结构简单,参数调整相对来说较容易,精度较高,易于接受。但是其系统参数均为固定值,对于非线性,大时滞性对象效果较差。模糊控制不基于准确的数学模型,仅仅模拟人的思维和方法,所以外界参数的变化对其控制效果影响比较小,稳定性强,能够很好的适应非线性和具有时滞性的控制系统。模糊控制能较好的适用车辆状况和路况的变化等干扰条件。因此文章设计了模糊控制器,以使车辆能更好的适用各种复杂的路况条件。
模糊控制器以理想横摆角速度和实际角速度的差值(E)及差值的变化率(EC)作为控制器输入,均分为 5 个等级{负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)},隶属度为三角形函数;根据输入的变化,实时的输出附加横摆力矩(ΔM),ΔM 均分为 7个等级{负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)},隶属度为三角形函数。其输入量和输出量的隶属度函数,如图3所示。
由车辆动力学理论可知,当汽车不足转向行驶时,应对电动汽车施加同向ΔM;当汽车过度转向行驶时,应对电动汽车施加反向的ΔM[10]。通过查阅大量文献和仿真试验,最终确定模糊控制器输出量(U)的ΔM值。如当实际横摆角速度远小于期望横摆角速度时,即E为NB时,说明电动汽车有侧滑失稳的危险状况。为了尽快消除这一状况,应对电动汽车施加一个正向大的ΔM,即ΔM取PB;当实际横摆角速度略小于理想横摆角速度时,即E为NS时,应对电动汽车施加一个正向小的ΔM就可以抵消误差,即ΔM取PM。其控制规则,如表1所示。
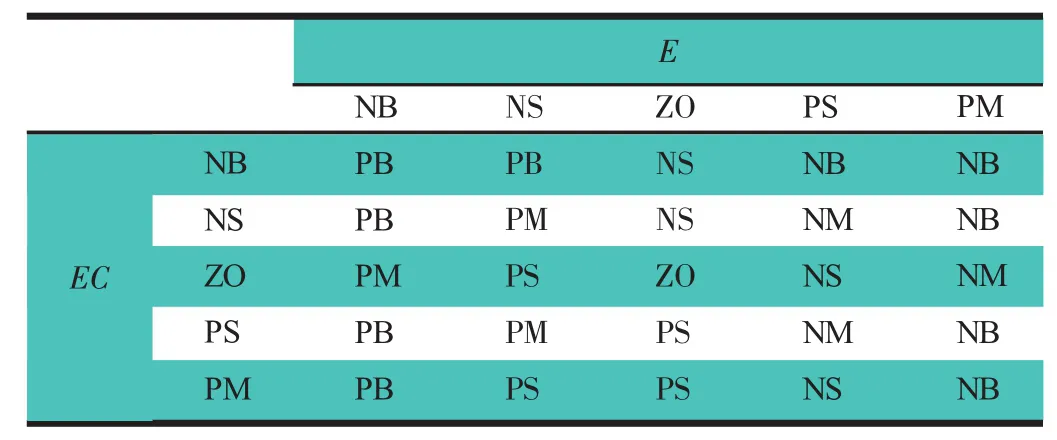
表1 模糊控制器的模糊控制规则
4 驱动力分配算法
文章针对前轮转向后轮驱动电动汽车进行研究,所以仅对2个后驱动轮进行单独控制。当驾驶员踩踏电子油门踏板,输出驱动力矩的目标值,使电动车加/减速或匀速行驶时,根据式(6)计算两驱动轮的驱动力矩和(T),即为驾驶员输出的目标值。当模糊控制器根据汽车运行状态输出附加横摆力矩后,驱动力分配模块则根据汽车运行状态和式(7)实时调节两轮的驱动力,使电动汽车能够安全稳定的进行差速行驶。
式中:T1,T2——左右轮的驱动力矩,N·m;
T——总的驱动力矩,N·m;
ΔM——附加横摆力矩,N·m;
B——后轮轮距,m;
r——车轮半径,m。
5 仿真试验
为验证基于横摆力矩控制的电子差速的控制效果,文章应用CarSim与Matlab/Simulink联合仿真试验,选取附着系数为0.3的双移线路面对电子差速控制方法进行验证。电动汽车模型参数,如表2所示。
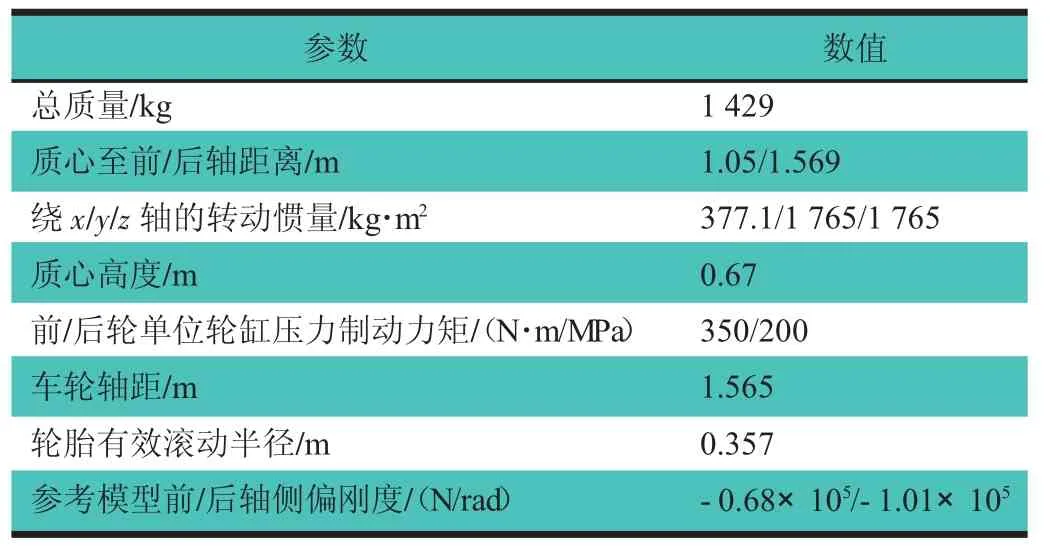
表2 电动汽车模型参数
采用双移线工况仿真验证,仿真结果,如图4所示。
从图4a可以看出:无控制汽车在90~130 m时出现较大的横向位移,证明汽车出现了严重的侧滑现象。汽车在150~220 m时出现甩尾的危险工况而失去控制;有电子差速控制的汽车基本沿着理想轨迹行驶,运行效果较好。从图4b可以看出:无控制汽车的实际横摆角速度与理想值偏差过大,证明汽车已失去控制;基于模糊控制的电子差速控制能够较好的将实际横摆角速度控制在理想角速度附近,明显提高车辆稳定性。从图4c可以看出:无控制汽车的车速则中途出现下降现象,证明汽车出现侧滑甩尾的危险工况,致使汽车运行停止;在电子差速控制下,汽车能平稳的变道并加速超车,对实际车辆运行具有借鉴意义。从图4d可以看出:随着驾驶员转动方向盘的动作,汽车的横摆加速度发生变化;模糊控制能实时调整附加横摆力矩,进而转化为驱动轮的驱动力矩;驱动力矩随着转向不同实时变化,但总的驱动力矩仍为驾驶员目标驱动力矩,使车辆能较好的跟随驾驶员意图运行。
6 结论
驱动力分配模块根据车辆运行状态合理分配,将横摆力矩转化为驱动轮附加驱动力矩。基于CarSim与Matlab/Simulink联合仿真试验,选择典型双移线工况对所研究电子差速的控制方法进行验证,验证结果表明:该控制方法能够实现良好地差速控制,明显提高电动汽车的稳定性;解决了独立驱动电动汽车转向时车辆差速的问题,并对弯道加速超车的工况具有一定的指导意义。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02 09:36:40
汽车实用技术(2022年5期)2022-04-02 09:36:20
装备制造技术(2020年9期)2021-01-26 00:15:08
中国新技术新产品(2020年4期)2020-05-05 15:49:48
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
火控雷达技术(2016年1期)2016-02-06 02:18:01
电源技术(2015年11期)2015-08-22 08:50:38
