
多绕组纯电动汽车动力电源控制系统研究*
2015-08-29 11:11徐振方孟艳花毛慧勇河南工业大学电气工程学院河南郑州450007
网络安全与数据管理 2015年5期
徐振方,孟艳花,毛慧勇(河南工业大学 电气工程学院,河南 郑州 450007)
多绕组纯电动汽车动力电源控制系统研究*
徐振方,孟艳花,毛慧勇
(河南工业大学电气工程学院,河南郑州 450007)
本系统为采用三路电池同时或者单独给九绕组电机供电的电动汽车动力系统,在主控制单元TSM2812的控制下并行工作,从而保证输出的三组电压同步,当某组蓄电池出现故障时,系统可以自动检测到其故障原因,通过主控单元封锁逆变器驱动脉冲使相应的逆变器停止工作,保证各组电池组独立,减弱了电池的成组效应,提高系统可靠性,保障行车安全;同时,该系统有效避免蓄电池放电时间过长,影响蓄电池使用寿命。为新能源纯电动汽车的推广提供了一种全新的控制理念和技术保障。
多绕组电机;IGBT;成组效应;动力电源
0 引言
我国正在成为全球最大的汽车生产和消费国。汽车逐渐成为人们必需的代步工具,汽车对能量的消耗逐年增加。到2020年,车用燃油的缺口将达到1.24亿吨。我国汽车行业面临能源危机,节能减排是新一代新能源汽车的重大挑战。同时汽车尾气排放已成为贡献PM2.5的主要来源之一。新能源汽车将成为能源动力系统的一次技术革命,是摆脱汽车对石油资源依赖、实现可持续发展的根本途径之一。在中国,新能源汽车的发展重点是电动汽车。发展电动汽车被普遍认为是实现动力系统转型、解决能源和环境危机的根本途径。电动汽车的技术不成熟和电动汽车未来几年的发展需求的矛盾,形成了目前纯电动汽车产业推进缓慢的被动局面。
1 系统工作原理
本系统为采用三路磷酸铁锂电池供电的电动汽车动力系统。它包括微电脑处理器、SPWM发生器、门极驱动模块(三路)、逆变模块(三路)、动力电池组(三组)、多绕组电动机、故障检测保护模块、显示模块、告警模块以及设定输入模块。
其中每一组动力电池组通过对应逆变模块向多绕组电机中的一组绕组独立提供能量。各逆变模块受控于对应门极驱动模块的控制。系统总体结构如图1所示,三组逆变器分别由三组锂电池组供电,在主控制单元的控制下并行工作,从而保证输出的三组电压同步,当某组蓄电池出现故障时,系统可以自动检测到其故障原因,通过主控单元封锁逆变器驱动脉冲使相应的逆变器停止工作,保证各组电池组独立,可有效防止因为某一组电池组出现故障,影响其余电池工作,减弱了电池的成组效应,提高系统可靠性,保障行车安全[1];同时,通过智能的电池管理系统可有效避免蓄电池过充、过放电问题,使磷酸铁锂电池的使用寿命延长三倍以上。
该系统采用三组蓄电池并联供电和多绕组电机驱动的方法,在不降低驱动功率的前提下,降低了系统工作电压,提高了安全性,降低了安装调试难度。
采用三组蓄电池并联供电,能够有效解决蓄电池成组效应导致的电池寿命缩短、供电可靠性降低等问题,可防止蓄电池过放电,延长蓄电池使用寿命;使系统供电连续可靠,保障行车安全。
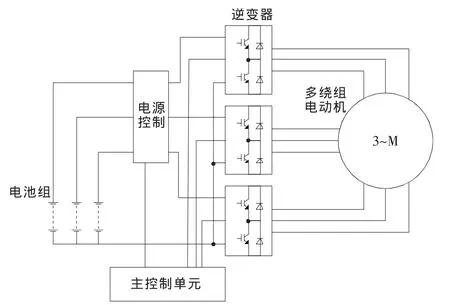
图1 系统总体结构图
2 系统硬件设计
本次设计采用三组电池同时对九绕组异步电动机进行供电,在故障时通过封锁逆变器,切断故障电路的供电。逆变器由驱动模块进行驱动。在整个工作过程中故障检测模块对系统的参数如电压、电流和电机转速等进行检测,并将检测结果传送到 DSP控制中心进行处理,DSP针对处理结果做出相应反应。结构框图如图2所示。

图2 系统结构框图
2.1多电池组设计
电池模块要达到较高的电压和容量,必须进行串联或者并联组合。
式中,Rs(t)为系统的可靠度,R=(1,2,3,…,n)表示第 i个单元的可靠度;m为并联电池数[2]。
本设计针对额定工作电压为 144 V的三相异步电机,采用三组相互独立的蓄电池并联供电,每组电池由45个标称电压为3.2 V的磷酸铁锂电池串联而成,每组电池标称电压由原来的336 V降低为144 V。这种设计不仅降低了电池组成组效应,大大降低了电池成本,而且使电气绝缘要求降低,安全性大为提高,符合电动汽车特别是电动轿车的发展方向。三组电池组独立供电,当其中任意一组或两组出现故障时,由主控单元将故障线路切断,不会影响其他电池组的正常工作,保证电动汽车不会抛锚。
2.2多绕组电机设计
为了满足电动汽车运行稳定,提高续航里程的要求,本次设计选用一个九绕组三相交流异步电动机做车载电机。九绕组三相交流异步电动机的每相绕组都是独立的,是不会相互影响的,当某相绕组发生故障时不会对其他绕组造成影响。同时,该多绕组电机可以实现三组电池同时供电,不但解决了电动汽车动力不足的问题,而且还提高了汽车运行的稳定性,三组电池中的一组电源出现故障时,系统自动直接切断该电池组,而不会影响其他两组电池组继续供电。这样,与传统的三绕组异步电机相比较,稳定性和运行的持久性都大大提高[3]。
2.3信号调理电路设计
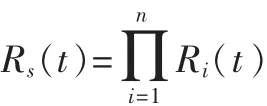
信号调理电路由两级运放构成,第一级采用反向比例放大单元,将电压控制在-1.5 V~+1.5 V之内;第二级为加法电路,提升放大后的电压信号,通过双向二极管BAV99将电压限制在3.3 V左右。具体电路如图3所示。
该模块通过接口JP3与汽车操作台相连,操作台的动作信号进入到该模块由 TL07411构成的滤波器和电压跟随器,滤波器起滤波和放大的作用,电压跟随器可增加电路的负载能力。信号经过滤波和放大后传到TSM2812的8路A/D输入端。
图3 信号调理图
2.4通信电路设计
该系统通过MAX232芯片与DSP进行通信,MAX232的作用是将DSP片内集成SCI模块3.3 V的UART信号电平转换成与RS-232兼容的 TTL信号电平[4]。系统采用A28C250实现CAN总线收发器接口芯片,通过该芯片的CANL和CANH实现CAN总线与物理总线以及电池管理系统通信,实现对电池系统的实时科学管理[5]。
2.5IGBT驱动电路设计
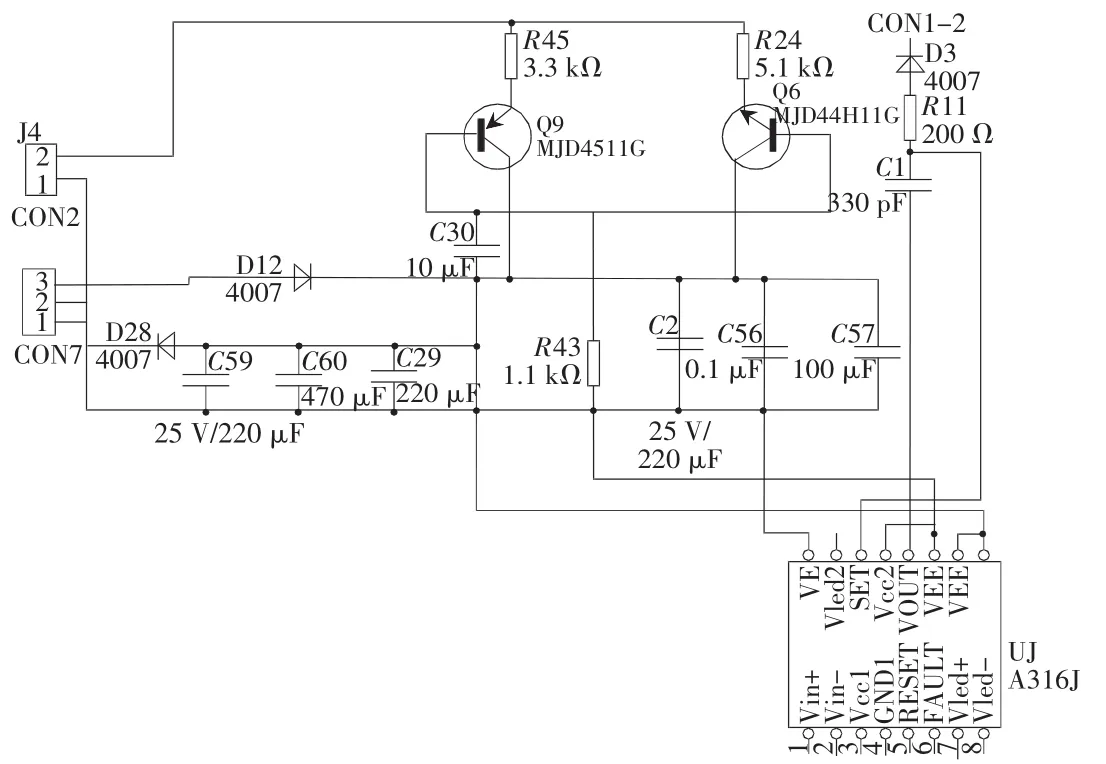
图4 IGBT驱动电路
电源通过驱动模块IGBT给系统各部分供电。IGBT导通时的电压通常小于3 V,如果电路出现瞬时过流状况,IGBT管电压将会迅速上升,将出现被击穿损坏的可能,所以必须实施IGBT快速断开的保护。系统采用A316J通过实施快速断开保护对 IGBT的导通和截止进行控制。速断保护的保护原理为:微处理器给定脉冲时,A316J通过14号引脚和16号引脚的外围电路,和被驱动的IGBT的C极和E极形成闭合环路,如果IGBT检测到的管压降大于7 V,则A316J封锁输出脉冲,与此同时,由6号引脚向DSP发出低电平有效的OC报警信号,DSP响应实施保护停机动作。如果DSP微处理器把低电平有效的复位信号传送到A316J的5引脚,则A316J获得复位信号后立刻解除脉冲封锁,同时解除故障状态,进入工作状态。图4所示是一路IGBT驱动电路。
2.6供电模块设计
主控板采用LM7805给MAX232提供+5 V电源,同时给W1117提供一个电压输入,通过W1117三端稳压电源将电压稳定在3.3 V左右,给DSP2407提供供电电源。该电源模块将LM7805和W1117集成在一个电路上,实现多输入稳定电源,该电源具有稳定性好、抗干扰强等优点[6]。
3 系统软件设计
当电动汽车插入钥匙开始启动时,程序控制系统对电流电压等进行检测,并将检测值与设定值进行比较,如果检测参数超过设定范围,系统发出报警并断开故障电路;如果检测参数在设定范围内,则对三组电池的电流峰值时间进行检测,并对三组电池的峰值电压进行比较,以检测三组电池供电是否同步。如果三组电池的电流峰值时间不同,则发出警报,并调整三组电池的供电,再对调整后的电流峰值时间进行检测,直到三组电池同步供电[7];如果三组电池的峰值电压相同,说明三组电池同时对电动机供电。如果需控制电动汽车加速和减速,则先对电动机转速进行检测,再将检测值与给定值进行比较,如果在安全范围内则直接加速或减速;如果不在安全范围内,也需要对转速进行调整,如检测值过大则减速,检测值过小则加速;在加减速后也需要对电机转速进行检测,以保证行车安全。如果需实现汽车的前进或倒退,则对电动机的转向进行检测,并将其保存在存储器中,再改变电机转向,进行转向操作后再对电动机转向进行检测,并将其与存储器中存储的信息进行比较,判断转向操作是否有效,如果比较结果是转向不同,则转向成功,相应转向指示灯发亮;如果通过比较得出的结果是转向相同,说明该次操作无效,需要重复上述操作。系统主程序流程图如图5所示。

图5 系统主程序流程图
4 结束语
该系统首次采用三组电池组串并联实现多电池组独立给九绕组电机供电,系统成功解决了一组电池出现问题导致汽车出现“抛锚”的问题,降低了电池的成组效应,提高了系统的续航能力。该系统采用软件封锁IGBT门极实现电池组的故障切换,采用DSP同时给三个 IGBT发送脉冲的办法,实现九绕组电机同步问题,防止电机运行期间出现“堵转”。该方案使纯电动汽车动力电源系统得到了进一步的优化[8],为新能源纯电动汽车的推广提供了一种全新的控制理念和技术保障。
[1]杨君,邱晓明,徐正藻.电动汽车动力电池组管理系统设计[J].软件,2011,32(3):54-56.
[2]刘保杰,王艳,殷天明.电动汽车电池管理系统[J].电气自动化,2010,32(1):60-62.
[3]张承宁,朱正,张玉璞,等.电动汽车动力电池组管理系统设计[J].计算机工程与应用,2006,42(25):35-37.
[4]李晓林.电动汽车整车控制系统介绍[J].科技资讯,2012 (19):27-29.
[5]陈兆军.电动汽车 CAN系统的管理与控制[J].中国商界,2013(3):406-407.
[6]王康.电动汽车电动轮驱动系统控制技术的研究[D].武汉:武汉理工大学,2007.
[7]范思广.电动汽车电机驱动系统及其控制技术的研究[J].汽车零部件,2011(8):15-19.
[8]李成学,杨大柱,吴文民.电动汽车速度闭环控制系统设计[J].电机技术,2008(6):4-6.
Research on electric vehicle power supply control system of multiple winding
Xu Zhenfang,Meng Yanhua,Mao Huiyong
(Electrical Engineering Institute,Henan University of Technology,Zhengzhou 450007,China)
This system uses 3 battery at the same time or separately supply power to the electric vehicle power system with 9 winding motor.It works in parallel on the control of the main control unit TSM2812,so as to ensure the synchronization of 3 groups of voltage output.When a group of battery is failure,the system can automatically detect the fault reason,make the corresponding inverter driving pulse stop work by the main control unit of inverter to ensure each battery independent,weakening the group effect of cell,improving system reliability,ensuring the driving safety.At the same time,the system can effectively avoid excessive discharge battery,prolong the service life of battery.It provides a new control concept and technical guarantee for the promotion of new energy of pure electric vehicles.
multiple winding electric motor;IGBT;group effect;power supply
TP216
A
1674-7720(2015)05-0076-03
郑州市科技攻关项目(20130657)
(2014-11-04)
徐振方(1976-),男,在读博士,副教授,主要研究方向:检测技术。
猜你喜欢
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
消费导刊(2017年19期)2017-12-13
电子制作(2017年7期)2017-06-05
电子制作(2017年1期)2017-05-17
海外星云(2016年17期)2016-12-01
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
电源技术(2016年9期)2016-02-27
云南电力技术(2015年2期)2015-08-23
