基于ADAMS的撬翻式茶园深耕机的运动分析
2015-08-24 00:42:19李坤肖宏儒宋志禹梅松丁文芹韩余农业部南京农业机械化研究所江苏南京210014
茶叶学报 2015年1期
李坤,肖宏儒,宋志禹,梅松,丁文芹,韩余(农业部南京农业机械化研究所,江苏 南京 210014)
基于ADAMS的撬翻式茶园深耕机的运动分析
李坤,肖宏儒*,宋志禹,梅松,丁文芹,韩余
(农业部南京农业机械化研究所,江苏 南京 210014)
对撬翻式茶园深耕机进行了运动分析,基于 ADAMS建立了撬翻式茶园深耕机的虚拟样机模型,并对速度、垂直位移等运动学特性进行了仿真研究。分析结果表明,仿真运行结果与理论分析一致,可以满足耕作深度的要求。该研究思路对茶园深耕机构的优化设计具有一定的参考价值,为设计提供了有效的依据,有较强的实用性。
茶园深耕机;ADAMS;虚拟模型;运动学仿真分析
成龄的丛栽茶园深耕要到达25 cm或者以上[1],因而只有耕作深度满足此要求的机器才可以顺利进行成龄丛栽茶园的深耕作业。如果采用传统的设计方法进行研究机器的耕作深度,需要制造多个物理样机,进行反复试验,成本高、周期长、效率低,还需要消耗大量的人力。因此,本文以机械系统动力学自动分析软件ADAMS为平台,建立撬翻式式茶园深耕机仿真模型并进行运动学仿真分析,为茶园深耕机的优化设计提供了新思路。
1 茶园深耕机的结构及工作原理
本文研究的茶园深耕机是由农业部南京农业机械化研究所研制的撬翻式茶园深耕机(结构图如图1所示)。撬翻式茶园深耕机的曲柄、摇杆、连杆、机架组成三组曲柄摇杆机构,连杆的一端固定有朝下方延伸的锄齿。深耕作业时,牵引机具通过的齿轮变速箱带动机曲柄摇杆机构完成类似人工掘地的动作。工作时,锄齿与地面成一定角度入土,然后深入土中,切开土壤,至最深位置时向后撬起土垡,并向后上方抛掷。三组工作锄齿,相互成120°角交替完成入土、撬土、出土交替动作。
2 茶园深耕机运动模型的建立
撬翻式茶园深耕机的运动简图如图2所示。
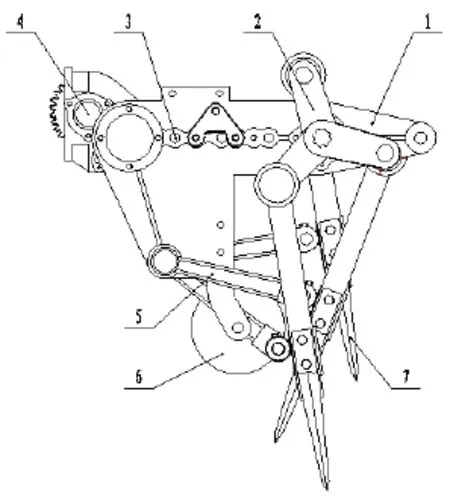
图1 茶园深耕机结构示意图Fig.1 Schematic diagram of deep-plowing machine for tea plantations
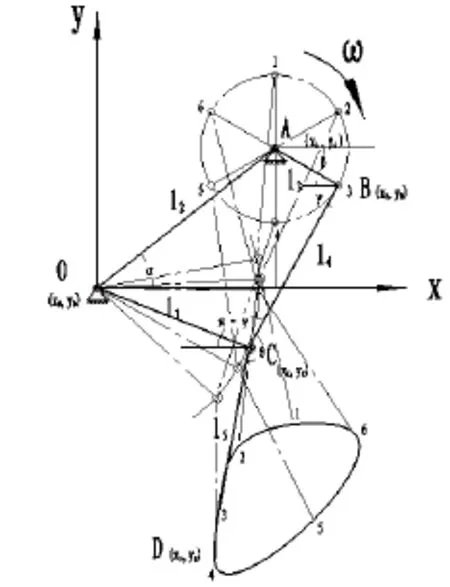
图2 茶园深耕机的运动简图Fig. 2 Kinematic diagram of deep-plowing machine for tea plantations
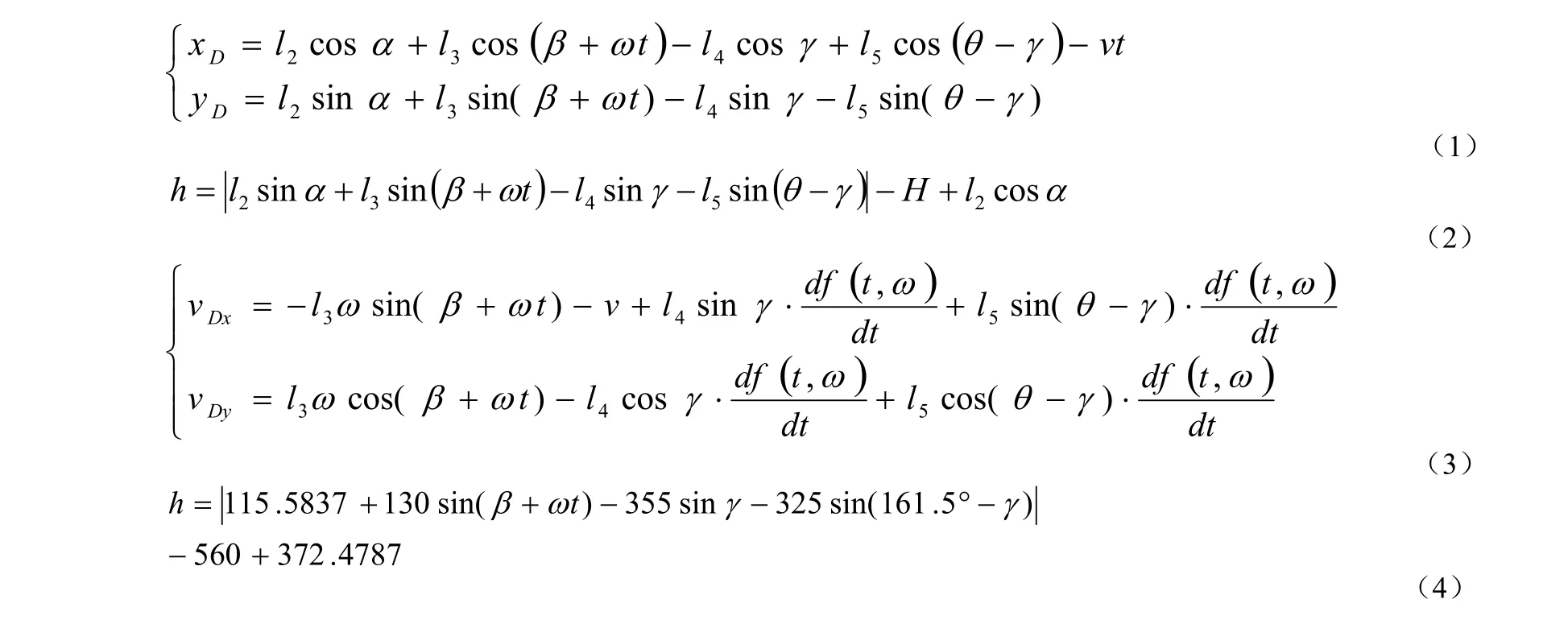
以摇杆的旋转中心 O为原点建立直角坐标系xoy,x轴正向和茶园深耕机前进方向相反,y轴正向垂直向上。设摇杆OC长度为l1,机架OA长度为l2,曲柄AB长度为l3,上锄臂BC长度为l4,下锄臂CD长度为l5,撬翻式茶园深耕机的前进速度为v,曲柄的旋转角速度为ω,曲柄与x轴正向所成的角度为β,连杆与x轴负向所成的角度为γ,经推导后撬翻式茶园深耕机的锄齿端点 D的运动方程为(1);
假设曲柄的旋转中心A距离地面的距离为H,则由式(1)可知锄齿的耕作深度为(2);
由于角度γ是随着时间t和曲柄角速度ω变化的,并且它们之间的关系比较复杂,所以本文对其进行简化处理。假设角度γ与时间t、角速度ω的关系为γ=f(t,ω),对式(1)进行时间的一阶求导,得到锄齿端点的速度方程(3);
经测量撬翻式茶园深耕机样机的各杆件、角度参数分别为l1=290 mm,l2=400 mm,l3=130 mm。l4=350 mm,l5=320 mm,α=38°。将上述参数带入式(2)中得,耕作深度为(4)。
由于上式含有未知变量γ,且该变量的精确变化范围不能确定,因而Isight优化求解、Excel规划求解等方法不能确定最大耕作深度,只有经过样机试验才能得到该机具的最大耕作深度。若茶园深耕机在此参数条件下未能满足最大耕深25cm的要求,说明杆件参数设计不合理,导致材料、人工等成本的严重浪费。为此在运动模型的基础上进行仿真分析,设计出满足茶园深耕要求的撬翻式茶园深耕机。
3 茶园深耕机的运动仿真分析
机械系统动力学自动分析软件 ADAMS ( Automatic Dynamic Analysis of Mechanical Systems)是美国MDI公司(Mechanical Dynamics Inc.)开发的虚拟样机分析软件。用户可以运用该软件非常方便地对虚拟机械系统进行静力学、运动学和动力学分析,能够帮助工程师更好地理解系统的运动、解释其子系统或整个系统即产品的设计特性,比较多个设计方案之间的工作性能,预测精确的载荷变化过程,计算其运动路径,以及速度和加速度分布图等。
3.1 几何建模
虽然机械系统动力学自动分析软件ADAMS并不是一款专业用于三维绘图的软件,它只具备简单的三维建模功能,但是对于一些结构比较复杂的机械,在不影响其研究结果的情况下,可以利用ADAMS进行简单的建模分析。从上文所述中可以看出,撬翻式茶园深耕机的工作原理是三组曲柄摇杆机构,在ADAMS环境中按机具的各杆件尺寸进行简化建模。由于本文只研究其运动的变化规律,因而简化机构没有质量,单位、栅格、重力等仿真环境设置都为软件自带的默认参数。
按前文所述的杆件参数建立简化机构[2-4],其端点的运动情况反映了深耕机锄齿的运动。建模后对其进行约束添加,本简化模型主要用到旋转副(Joint:Revolute)、固定副(Joint:Fixed)、移动副(Joint:Translational)等约束。其中锄齿上臂和锄齿下臂的固结采用固定副,零件间的铰接采用旋转副,机架与大地(Grand)采用移动副。对曲柄添加旋转驱动(Rotational Joint Motion),设置曲柄的转速;对机架添加移动驱动(Translational Joint Motion)设置机架的前进速度。添加约束和驱动后,软件仿真的工作界面如图3所示。

图3 ADAMS仿真工作界面图Fig.3 Simulation interface of ADAMS
3.2 仿真结果分析
设置仿真终止时间(End Time)为10,仿真工作步长(Step Size)为0.01,系统进行运动学仿真,可得锄齿端点的运动变化规律曲线图。
图4为锄齿端点在垂直方向上的运动轨迹图。从图中可以看到,在前进速度、转速一定的条件下,锄齿端点在 y轴上的分位移的最小值为:Min=-248.7089 mm。最小值为负值说明是锄齿端点在仿真系统中MARKER¯22点建立的坐标系y轴方向与入土方向相反。由图中的最小值可以看出,锄齿入土的最大垂直距离为248.7089 mm,即最大耕深为24.87089 cm(约为25 cm)。
图5为锄齿端点在垂直方向上速度和位移的仿真结果。从图中可以得到,当锄齿端点运动到最大的耕作深度位置时,锄齿端点的y轴分速度恰好为0,并且两者的波形都与正余弦的波形相似。这说明当锄齿耕作深度达到25 cm时,此时锄齿只有水平的前进速度,而无垂直方向上的速度,这致使锄齿一边随机具前进,一边向后抛土,但锄齿不再继续向更大深度挖掘。
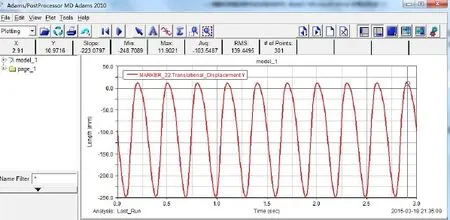
图4 耕作深度的仿真结果Fig.4 Simulation tillage depth
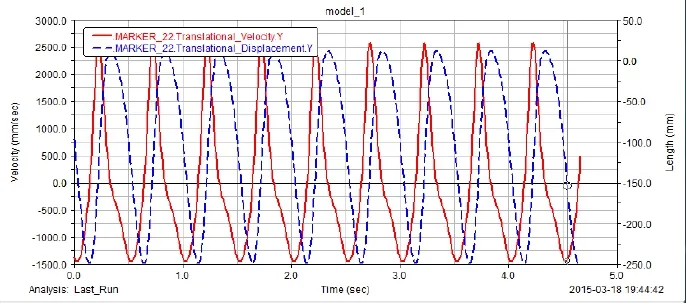
图5 锄齿的位移和速度Fig.5 Displacement and velo of tine
4 试验验证
2014年10月30日,于江苏省盐城市盐海拖拉机制造有限公司的试验田进行撬翻式茶园深耕机试验。由于不同土壤的坚实度和含水率对撬翻式茶园深耕机产生的反作用力不同,进而在本中就会对耕作深度的产生影响。当坚实度和含水率较低时,土壤对茶园深耕机的反作用力较小,土壤易于耕作,耕作深度会较大;反之,当坚实度和含水率较大时,土壤对茶园深耕机的反作用力较大,耕作深度会随之减小。因而试验开始之前,先对试验田地进行坚实度与含水率的测量,只有满足实际茶园土壤物理参数的田地才可以进行耕深试验。在测试区的内对角线上取5点,每点按0~10、10~20、20~30 cm分层进行测定,并分别算出分层和全层平均值。其中全层平均值作为土壤的物理参数。
土槽土壤坚实度是用杭州迈煌科技有限公司生产的MH-JSD型土壤紧实度速测仪进行测量。五个测试点的土壤全层平均坚实度如表1所示。
用烘干法测量土壤的含水率,其测点与土壤坚实度的测点相对应。每层取不少于30 g的土样(去掉石块和植物残体等杂质),装入铝盒后称重,放在105℃恒温烘箱中烘烤约6小时,一直到质量不变为止。然后取出放入干燥器中冷却到常温称重,并分别计算出分层和全层的平均土壤含水率,以全层的平均土壤含水率作为该点的含水率[5]。五个测试点的土壤全层平均含水率如表2所示。
由以上数据可知,试验田地的坚实度为0.464MPa,含水率为 25.12%,该试验田地与茶园土壤的坚实度和含水率差别不大,是一块理想的试验用地并符合试验方法的规定和要求。因而可以进行撬翻式茶园深耕机的耕深试验。撬翻式茶园深耕机挂接在盐城市盐海拖拉机制造有限公司生产的2FX-500L型履带式拖拉机上,机器匀速前进时,用耕深尺沿机组的前进方向每隔2 m测量一点的最大耕作深度。测量时分为快、慢档2个工况,每个工况测2个行程,每个行程各测5点,5点的平均值作为该行程下的平均最大耕作深度。测量结果如表3所示。
由上表可以看出,撬翻式茶园深耕机在不同工况下的最大耕作深度都能达到27 cm左右,比前文的仿真结果略高,误差在8.4%左右,这是由于试验地不平和土壤的粘结性所导致的。仿真结果和试验结果验证了在此杆件参数条件下,撬翻式茶园深耕机满足茶园深耕25 cm的要求,可以进行茶园深耕机的实际生产作业。

表1 五个测试点的坚实度Table 1 Solid of the five test points

表2 五个测试点的含水率Table 2 Moisture contents in soil at 5 testing sites
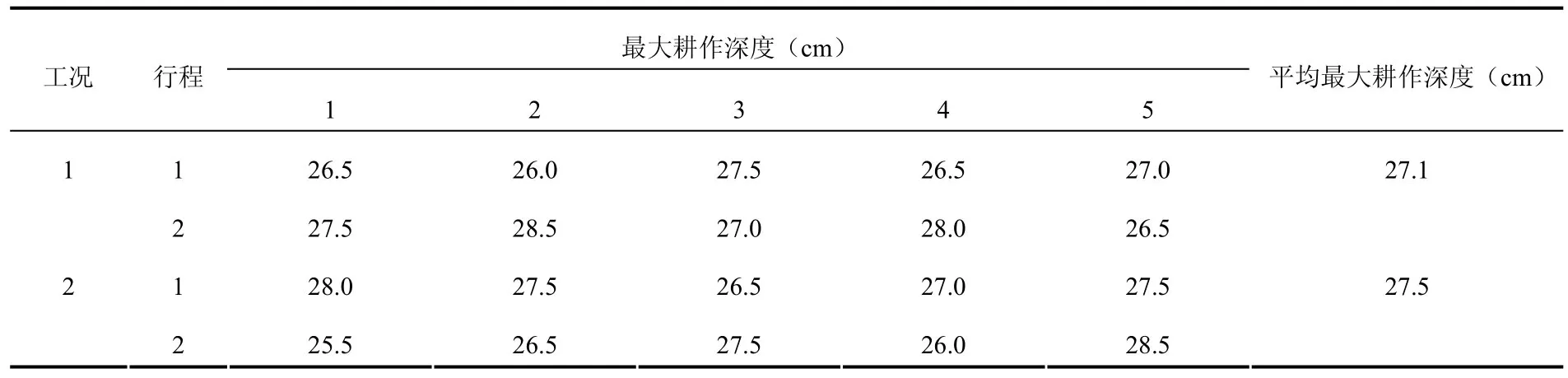
表3 测试点的耕作深度Table 3 Tillage depths at 5 testing sites
5 结论
在常规的机械设计中,往往需要人为地不断修改设计参数以达到设计要求,这需要大量的重复工作。本文利用ADAMS软件对撬翻式茶园深耕机进行建模与运动仿真,并将仿真结果与试验相比较,结果表明,该条件下的杆件参数满足茶园深耕要求。将虚拟样机技术应用到撬翻式茶园深耕机的设计过程中,能够仿真分析各种参数对机器工作性能的影响,仿真结果为进一步进行撬翻式茶园深耕机的优化设计奠定了基础。
[1] 王叶红.茶园土壤耕作技术[J].安徽林业,2006,(5):37-38.
[2] 郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2005.
[3] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2008.
[4] 王成,王效岳.虚拟样机技术及ADAMS[J].机械工程与自动化,2004,(12):66-68.
[5] 国家机械工业局.JB/T 9803.2-1999.中华人民共和国机械行业标准:耕整机试验方法[S].北京:中国标准出版社,2000.
ADAMS Modeling and Kinematic Analysis on Deep-plowing Machine for Tea Plantations
LI Kun,XIAO Hong-ru*,SONG Zhi-yu,MEI Song,DING Wen-qin,HAN Yu
(Nanjing Research Institute of Agricultural Mechanization, Ministry of Agriculture,Nanjing,Jiangsu 210014,China)
Applying the software, ADAMS, a virtual prototype model for a deep-plowing machine was constructed. A kinematic simulation analysis using the model to evaluate the operational characteristics including velocity and vertical displacement for tea plantations was conducted. The results suggested that the tested machine would satisfy the requirements for the purpose of deep tillage on a tea plantation. Furthermore, the information obtained could also be valuable for the design of an improved deep-plowing machine.
deep-plowing machine; tea plantation; ADAMS; virtual model; kinematic simulation analysis
S233.1
A
2014-12-30 初稿;2015-03-05 修改稿
现代农业茶叶产业技术体系(CARS¯23);公益性行业(农业)科研专项(201303012);中国农业科学院创新工程——果蔬茶类收获机械创新团队。
李坤(1989-),男,硕士研究生,研究方向为农业装备工程技术。E-mail:ddlikun19891119@163.com
肖宏儒(1957-),研究员,研究方向为农业装备技术。E-mail:xrh2712@sina.com
猜你喜欢
数学物理学报(2022年2期)2022-04-26 14:08:34
机械工程师(2021年4期)2021-04-19 07:27:56
设备管理与维修(2019年22期)2019-12-19 01:30:12
中学生数理化·教与学(2019年8期)2019-09-18 15:08:40
机械研究与应用(2018年5期)2018-11-05 05:59:38
数学物理学报(2017年1期)2017-06-05 09:12:28
水土保持研究(2016年4期)2016-10-21 02:28:59
新农业(2016年15期)2016-08-16 03:40:48
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:52
土壤与作物(2015年3期)2015-12-08 00:46:58