
基于UG的时序分配间歇传动机构的设计与仿真
2015-08-22 02:28贺晓华王培林苏磊张灿升
漳州职业技术学院学报 2015年1期
贺晓华,王培林,苏磊,张灿升
(1.柳州职业技术学院 机电工程系,广西 柳州 545006;2.闽西职业技术学院 机械工程系,福建 龙岩 364021;3.福建致尚生物质材料发展有限公司,福建 龙岩 364012)
基于UG的时序分配间歇传动机构的设计与仿真
贺晓华1,王培林2,苏磊1,张灿升3
(1.柳州职业技术学院 机电工程系,广西 柳州 545006;2.闽西职业技术学院 机械工程系,福建 龙岩 364021;3.福建致尚生物质材料发展有限公司,福建 龙岩 364012)
采用UG NX6的参数化设计功能,根据甘蔗自动捆扎机的动作时序要求,完成了不完全齿轮的修齿位置确定和多轴间歇运动的传动路线分配,利用UG自带的adams运动仿真模块进行了仿真。仿真结果表明,设计达到了预期目标。
参数化设计;运动仿真;间歇传动
1 引言
甘蔗自动捆扎机的工作分为定量下料、抱紧、送线和打结四个步骤。这四个步骤在一个捆扎工作周期内的不同时间段依次动作,而且相互之间有不同的重叠时间,从而完成一次完整的甘蔗定量捆扎。分析其运动本质,这是由多个间歇运动按特定时序组合而实现的复杂机械运动。由于甘蔗自动捆扎机采用柴油机作为动力源,因此在采用不完全齿轮—完全齿轮传动副实现这一复杂运动时,需要解决两个关键问题,一是不完全齿轮的修齿位置的确定,二是单一连续运动对多轴间歇运动的传动路线的分配。传统上解决这两个问题需要繁琐的试算和反复的作图推敲,通过运用UG软件的参数化设计功能,可以巧妙地快速完成上述设计。
2 时序分配间歇传动机构的设计
2.1间歇传动总体设计
甘蔗自动捆扎机如图1所示,包括下料机构、抱紧机构、送线机构和打结机构四个功能部分。这四部分分别由四根驱动轴驱动,每根轴旋转一周,则完成一个动作。整个捆扎机按照一定的时序要求依次完成定量下料、甘蔗抱紧、送线、打结成捆等动作,实现甘蔗的自动捆扎。甘蔗自动捆扎机的动作时序如图2所示。
甘蔗自动捆扎机的动力输入采用柴油机,为单一连续旋转运动,输出为多个间歇旋转运动,常规的凸轮、槽轮机构均不能有效实现这一运动组合。经过综合考虑,采用不完全齿轮—完全齿轮传传动副可较好地实现这一功能。不完全齿轮—完全齿轮传传动副可以方便的实现各种间歇比,只要根据运动周期和各间歇运动的时间比,就可分别确定完全齿轮的齿数以及各不完全齿轮的齿数。通过分别与完全齿轮和不完全齿轮固装的锁止弧凹凸弧段的配合,可保证输出轴的可靠锁止。通过改变不完全齿轮之间相对的初始位置,可以获得所需要的时序分配。带锁止弧的不完全齿轮—完全齿轮传动副如图3所示。[1][2]
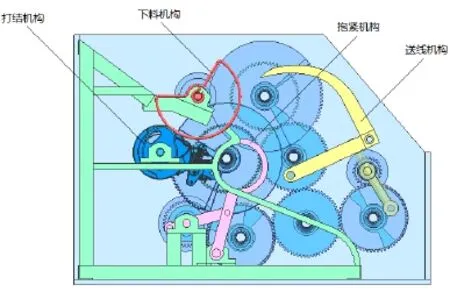
图1 甘蔗自动捆扎机示意图
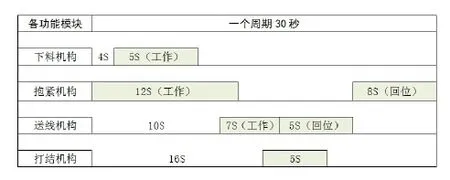
图2 甘蔗自动捆扎机时序分配图
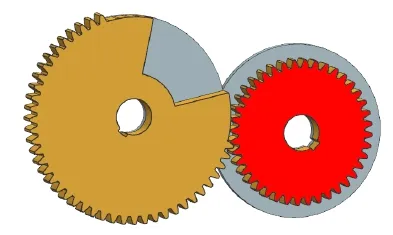
图3 带锁止弧的不完全齿轮—完全齿轮传动副
2.2不完全齿轮修齿位置的确定
由于齿轮传动的重合度大于1,因此要想得到较为精确的间歇比,需要对不完全齿轮进行修齿处理。传统上进行修齿需要先对实际啮合线进行计算,再根据计算结果手工确定修齿位置,非常繁琐。由传动要求可知,输入轴转过某一角度,输出轴旋转一周。如果能分别确定不完全齿轮—完全齿轮的初始啮合位置和终了啮合位置,就可以根据啮合齿的相对位置快速找到修齿位置。借助于UG的参数化设计功能,可以较为方便的解决这个问题。在UG中首先按照不完全齿轮与完全齿轮啮合的开始状态把两个齿轮装配好,然后固定不完全齿轮,再按照不完全齿轮与完全齿轮啮合的结束状态装配一次。把这两次装配的状态投影到草图中,用输出轴完全齿轮的齿顶圆截去啮合结束状态下输入轴不完全齿轮的重叠部分,即可计算出不完全齿轮轮上所需的齿数,并对末齿进行修齿以满足啮合关系,如图4所示。[3][4]
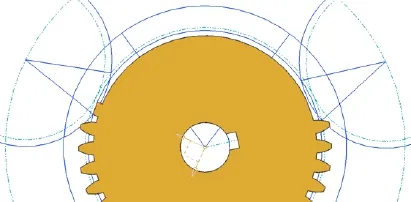
图4 不完全齿轮修齿位置的确定
2.3时序分配间歇传动机构传动路线的分配
把每一个间歇运动的不完全齿轮都设计好之后,就需要设计如何实现多个间歇运动组合的传动路线了。在设计中,除了输出轴的位置是已知之外,其余所有的传动轴位置都可能有多个解,利用UG草图的参数化功能可以快速获得较好的设计结果。首先在草图中画出输出轴的位置,然后根据不完全齿轮—完全齿轮的轴心距画圆确定完全齿轮的轴心范围,再根据边界以及轴心相互之间的距离初步确定各完全齿轮轴的轴心位置如图5所示。
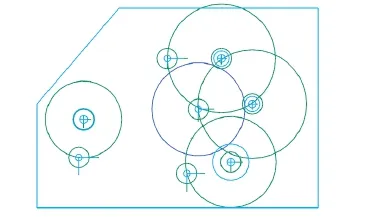
图5 初定完全齿轮轴的位置
在各个完全齿轮轴的轴心位置画上完全齿轮的分度圆,根据各分度圆之间的距离选取一个合适的传动齿轮尺寸,按照传动关系分别施加约束,则各分度圆会自动按照约束关系调整各自的位置,调整传动齿轮的尺寸以消除各分度圆与轴的干涉,最终就可以获得较为满意的时序分配间歇传动机构传动路线。最终的传动路线如图6所示。

图6 时序分配间歇传动机构传动路线
根据确定好的传动路线如图分别进行轴、轴承、弹簧挡圈等零部件的实体建模、装配,最终完成时序分配间歇传动机构如图7所示。
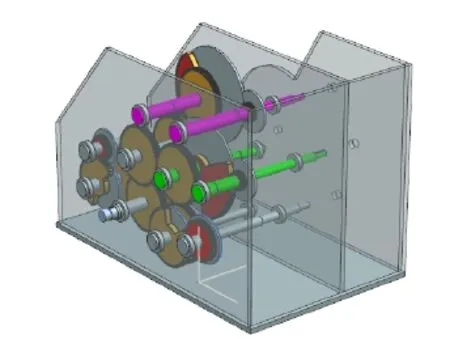
图7 时序分配间歇传动机构
3 时序分配间歇传动机构运动仿真
进入UG自带的adams运动仿真模块,添加质量属性、运动副、约束等仿真要素,对时序分配间歇传动机构的输入齿轮轴添加驱动,设置角速度为12.0d*time,解算后进入后处理即可查看仿真曲线。[5]图8为抱紧前挡顶点的Y方向位移曲线。图9为四个输出从动轮轴的角速度曲线。
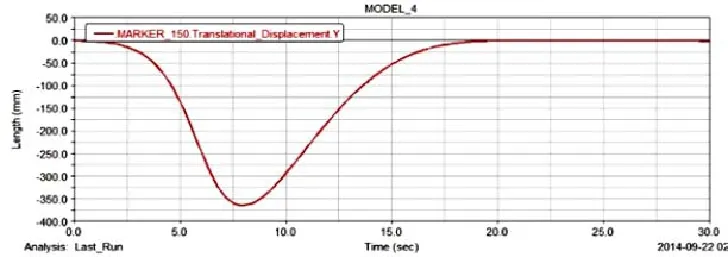
图8 抱紧前挡顶点的Y方向位移曲线
在图8中,抱紧前档运动时长20S,停止时长10S,其中运动过程包括8S的放松行程和12S的抱紧行程。这表明抱紧前档实现了间歇运动,且具有满足抱紧甘蔗所需的急回特性。从图9可知,下料输出轴转动时间为4S-9S,转动角速度为720/S左右;抱紧前档输出轴转动时间为0S-12S和22S-30S,转动角速度为180/S;送线输出轴转动时间为10S-22S,转动角速度为300/S;打结输出轴转动时间为16S-21S,转动角速度为720/S。这些数据与设计预期相一致,说明设计取得了较好的结果。
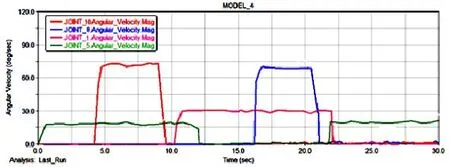
图9 输出从动轮轴的角速度曲线
4 结论
运用UG的参数化设计功能,通过施加不同的约束来模拟传动的不同状态,从而方便的实现了不完全齿轮的修齿和时序分配间歇传动机构的传动路线设计。运动仿真结果表明,设计实现了所需的运动,达到了预期目标。该时序分配间歇传动机构已获得国家专利,填补了甘蔗收获机械在该领域的空白。
[1]濮良贵,纪名刚.机械设计[M].北京:高等教育出版社,2009.
[2]董爱军.不完全齿轮机构中锁止弧的可靠设计[J].机械设计与研究,2002(3):41-45.
[3]楚登科,范祥聪.NX草图分析在制动踏板设计中的应用[J].企业科技与发展,2014(15):35-37.
[4]张英,安占军.基于NX草图建立数学模型进行产品设计研究[J].CAD/CAM与制造与信息化,2012(3):47-49.
[5]郑凯,胡仁喜,陈鹿民.ADAMS 2005机械设计高级应用实例[M].北京:机械工业出版社,2006.
(责任编辑:季 平)
Design and Simulation of sequential intermittent motion mechanism based on UG
HE Xiao-hua1,WANG Pei-lin2,SU Lei1,ZHANG Can-sheng3
(1.Department of mechanical,engineering,LiuZhou Vocational and Technical College,GuangXi LiuZhou 545006,China; 2.Department of mechanical engineering,Minxi Vocational and Technical College,FuJian Longyan, 364021,China; 3.Fujian Zhishang Biomass Materials CO.,Ltd,FuJian Longyan,364012,China)
Using parametric design function of UG NX6,according to the requirements of sugarcane automatic strapping machine action sequence,ascertained the position of trimming incomplete gear and assigned the transmission path of multi-axis intermittent motion.using Adams motion simulation module of UG,simulated the intermittent motion.simulation results show that the design result has achieved the anticipated target.
Parametric design;Motion simulation;intermittent motion
TH132.41;TP391.92
A
1673-1417(2015)01-0017-06
10.13908/j.cnki.issn1673-1417.2015.01.0004
2015-01-20
贺晓华(1972-),男,湖南衡南人,副教授,硕士,主要从事机械CAD/CAE、机电一体化教学科研工作。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
体育科技文献通报(2022年3期)2022-05-23
煤气与热力(2022年4期)2022-05-23
小猕猴智力画刊(2022年3期)2022-03-28
昆明医科大学学报(2021年6期)2021-07-31
铁道建筑技术(2020年11期)2020-05-22
小猕猴学习画刊(2019年8期)2019-09-16
特别健康(2018年3期)2018-07-04
电子制作(2017年13期)2017-12-15
中国糖料(2016年1期)2016-12-01
