基于贝叶斯网络的车辆换道模型
2015-08-07 14:10邱小平刘亚龙马丽娜杨达
交通运输系统工程与信息 2015年5期
邱小平,刘亚龙,马丽娜,杨达*,2
(1.西南交通大学交通运输与物流学院,成都610031;2.综合交通运输智能化国家地方联合工程实验室,成都610031;3.综合运输四川省重点实验室,成都610031)
基于贝叶斯网络的车辆换道模型
邱小平1,2,3,刘亚龙1,马丽娜1,杨达*1,2
(1.西南交通大学交通运输与物流学院,成都610031;2.综合交通运输智能化国家地方联合工程实验室,成都610031;3.综合运输四川省重点实验室,成都610031)
车辆换道行为是微观交通流中最基本的驾驶行为之一,研究车辆换道行为可以提高车辆换道模型的仿真精度和减少由不合适的车辆换道行为引发的交通事故.当前车辆换道模型大多是基于驾驶员的决策思维方式建立的决策模型,这类模型的缺点是很难捕捉到驾驶员在决策过程中一些潜在决策模式和考虑的影响因素.鉴于此,本文引入了一种典型的人工智能方法——贝叶斯网络,建立了一个全新的车辆换道模型,试图通过机器学习的途径来提高车辆换道模型的精度.采用了分段离散化的方法对数据进行预处理,然后使用处理后的数据对贝叶斯网络的结构和参数进行学习,并分别建立了与两种贝叶斯网络结构相对应的车辆换道模型,最后对建立的模型分别进行验证.模型的验证结果表明,建立的基于贝叶斯网络的车辆换道模型对换道行为的识别率可以达到88%以上.此模型还可进一步应用到驾驶员辅助系统的开发中.
公路运输;贝叶斯网络;机器学习;车辆换道;特征离散
1 引言
车辆换道是实际中最为常见的驾驶行为之一,也是微观交通流仿真软件中的基本模块之一.1985年,美国为了研究微观交通流,利用航拍数据建立了车辆运行的微观信息数据库,促进了车辆换道模型的进一步发展[1].当前研究中,根据驾驶员追求获益的动机不同,可以将换道行为分为两类:强制性换道和自主性换道[2-5].驾驶员为完成其正常的行驶目的而不得不采取的换道行为,称为强制性换道;驾驶员为了获得优于当前车道的行驶条件而进行的变道行为,称为自主性换道[6]. YANG,Koutsopoulos[7]、智永锋等[8]、王荣本等[9]、Hidas P[10]、Toledo T等[11]采用可接受间隙模型对换道模型进行了研究,在换道车辆与目标车道上前后车辆的车距被驾驶员所接受时,驾驶员才会考虑执行换道.Meng Q,Weng J[12]、Kita等[13-14]建立了基于离散选择模型的车辆换道模型,如二元Logit模型.
上述模型大多是基于驾驶员的思维方式建立的决策模型,此类模型的缺点是很难精确捕捉到驾驶员在决策过程中一些潜在决策模式和考虑的影响因素.而本文引入了贝叶斯网络,建立了一个全新的车辆换道模型,试图通过机器学习的途径来提高车辆换道模型的预测精度.传统的方法只考虑了一些显性因素,而机器学习的优点就在于它能够捕捉到人类察觉不到的隐性因素,因此,本文提出的模型克服了上述传统换道模型的缺点.首先对数据进行预处理,并将处理后的数据分成训练数据和测试数据两部分,采用两种方法确定贝叶斯网络的结构;然后进行参数学习;最后利用测试数据进行预测,将两种方法所建立的基于贝叶斯网络的车辆换道模型的测试结果进行对比,验证了新建的车辆换道模型的有效性.
2 贝叶斯网络简介
贝叶斯网络是目前不确定知识表达和推理领域最有效的理论模型之一,而朴素贝叶斯分类器是最为经典的贝叶斯网络,朴素贝叶斯分类的大致思想如下所述[15]:
(1)将每个样本用一个m维特征向量Y={Y1,Y2,...,Ym}表示,分别描述此样本m个特征属性X1,X2,...,Xm的度量.
(2)假定有n个类A1,A2,...,An,现有一所属分类未知的样本Y,分类器将对Y所属的具有最高后验概率的类进行预测,也就是朴素贝叶斯算法把所属分类未知的样本Y分配给Ai(i∈[1,n]),当且仅当P(Ai|Y)>P(Aj|Y),对任意的j=1,2,...,n,j!=i.其中,P(Ai|Y)称为最大后验概率,由贝叶斯定理知,最大后验概率按式(1)计算:

(3)P(Y)为样本Y的先验概率.对每一类,均视P(Y)为常数,那么只需P(Y|Ai)P(Ai)达到最大即可.通常假定全部类是具有相同概率的,即P(A1)=P(A2)=...=P(An),因此,求最大后验概率的问题就被简化为对P(Y|Ai)的最大化,通常称P(Y|Ai)为给定Ai时样本Y的似然度.否则,需要对P (Y|Ai)P(Ai)最大化,此时,类Ai的先验概率计算式如式(2):

式中si是属于类Ai的训练样本数;s是训练样本总数.
(4)对具有较多属性的历史数据集,计算P(Y|Ai)所需的时间将会非常长.为缩短计算P(Y|Ai)的时间,假定类之间条件独立,则Y的似然度P(Y|Ai)按式(3)计算:

(5)判定所属类未知的样本Y的分类.对每个类Ai,先分别计算似然度P(Y|Ai),先验概率P(Ai)所对应的值,然后根据贝叶斯公式计算得:在Y的条件下每个类的后验概率P(Ai|Y),i=1,2,...,n.由下式

可知Y∈Ak.
3 数据介绍
本文所用到的数据是由美国联邦公路局以研究微观交通仿真为目的而发起的NGSIM(Next Generation Simulation)研究计划所获得数据,此数据是利用航测的方法采集指定地点的换道车辆动态行驶轨迹数据集.这套数据可以反映多个车道中车辆的速度、行驶位置、车身长度,以及加速度等信息,时间可以精确到0.1 s,是对换道模型的参数标定、行为分析等方面研究所通用的理想数据.虽然这个项目是由美国高速公路管理局采集的,但车辆换道特性在总体上具有一般性,受国籍和区域影响较小,并且是在一般环境下采集到的交通参数数据,因此这套数据备受学者关注,也被很多国家的研究人员用来进行换道理论的研究.
本文研究的车辆换道行为是在一般环境中的表现,在模型训练与模型测试过程中都将采用上述数据源.本文旨在研究车辆换道现象,而NGSIM换道数据主要反映多车道车辆行驶状况,因此,此数据源非常适合用来进行车辆换道行为的研究.
通过对NIGSIM数据的甄选,获得了971组观测数据,其中包括501次不换道事件,470次换道事件.采用上述离散化处理的方法将连续型特征变量转换成离散型特征变量,并且将其中70%用于网络的训练,30%用于网络的测试,即观测数据被进一步划分为两部分:训练数据和测试数据.
4 基于贝叶斯网络的车辆换道模型
建立贝叶斯网络模型之前,需要构建贝叶斯网络,其构建的内容包括以下三部分:①变量选取;②结构学习;③参数学习.本文采用两种方法来获得贝叶斯网络结构:①专家知识和数据融合相结合的方法;②直接采用朴素贝叶斯网络结构.
4.1 变量选取及离散化处理
影响驾驶员换道行为的因素有很多,本文首先通过对前面研究[7-10]中影响车辆换道行为的因素进行分析,然后结合换道环境,如图1所示,最终选用11个影响因素,这些因素将作为模型的输入变量,定义如下:
Vm——换道车辆的行驶速度;
ΔVf——换道车辆的前方车辆与换道车辆的速度差,即

式中Vf为换道车辆的前方车辆的行驶速度;
ΔVlf——换道车辆左侧车道前方车辆与换道车辆的速度差,即

式中Vlf为换道车辆左侧车道前方车辆的行驶速度;
ΔVlb——换道车辆左侧车道后方车辆与换道车辆的速度差,即

式中Vlb为换道车辆左侧车道后方车辆的行驶速度;
ΔVrf——换道车辆右侧车道前方车辆与换道车辆的速度差,即

式中Vrf为换道车辆右侧车道前方车辆的行驶速度;
ΔVrb——换道车辆右侧车道后方车辆与换道车辆的速度差,即

式中Vrb为换道车辆右侧车道后方车辆的行驶速度;
Gf——换道车辆的前方车辆与换道车辆的距离;
Glf——换道车辆左侧车道前方车辆与换道车辆的距离;
Glb——换道车辆左侧车道后方车辆与换道车辆的距离;
Grf——换道车辆右侧车道前方车辆与换道车辆的距离;
Grb——换道车辆右侧车道后方车辆与换道车辆的距离.

图1 换道场景示意图Fig.1 Schematic diagram of lane changing environment
由于采集到的微观交通数据是连续的数值,而且特征变量的值域和单位均不相同,因此,在进行贝叶斯网络的结构学习和参数学习之前需对数据进行离散化预处理.对影响车辆换道行为的11个变量的状态空间进行划分,经过多次尝试,获得最优划分情况如下
Vm:[0,9),[9,18),[18,27),[27,36),[27,36),[36,45), [45,54),[54,+∞)分别对应{1,2,3,4,5,6,7}
ΔVf:(∞-,-30),[-30,-20),[-20,-10),[-10,0), [0,10),[10,+∞)分别对应{1,2,3,4,5,6}
ΔVlf:(∞-,-20),[-20,-10),[-10,0),[0,10), [10,20),[20,+∞)分别对应{1,2,3,4,5,6}
ΔVlb:(∞-,-20),[-20,-10),[-10,0),[0,10), [10,20),[20,+∞)分别对应{1,2,3,4,5,6}
ΔVrf:(∞-,-20),[-20,-10),[-10,0),[0,10), [10,20),[20,+∞)分别对应{1,2,3,4,5,6}
ΔVrb:(∞-,-20),[-20,-10),[-10,0),[0,10), [10,20),[20,+∞)分别对应{1,2,3,4,5,6}
Gf:(∞-,10),[10,20),[20,30),[30,40),[40,50), [50,60),[60,70),[70,80),[80,90),[90,+∞)分别对应{1,2,3,4,5,6,7,8,9,10}
Glf:[0,10),[10,20),[20,30),[30,40),[40,50), [50,60),[60,70),[70,80),[80,90),[90,+∞)分别对应{1,2,3,4,5,6,7,8,9,10}
Glb:[0,10),[10,20),[20,30),[30,40),[40,50), [50,60),[60,70),[70,80),[80,90),[90,+∞)分别对应{1,2,3,4,5,6,7,8,9,10}
Grf:[0,10),[10,20),[20,30),[30,40),[40,50), [50,60),[60,70),[70,80),[80,90),[90,+∞)分别对应{1,2,3,4,5,6,7,8,9,10}
Grb:[0,10),[10,20),[20,30),[30,40),[40,50), [50,60),[60,70),[70,80),[80,90),[90,+∞)分别对应{1,2,3,4,5,6,7,8,9,10}
离散化处理后的部分训练数据和测试数据如下表1和表2所示.

表1 部分训练数据Table 1Part of train-data
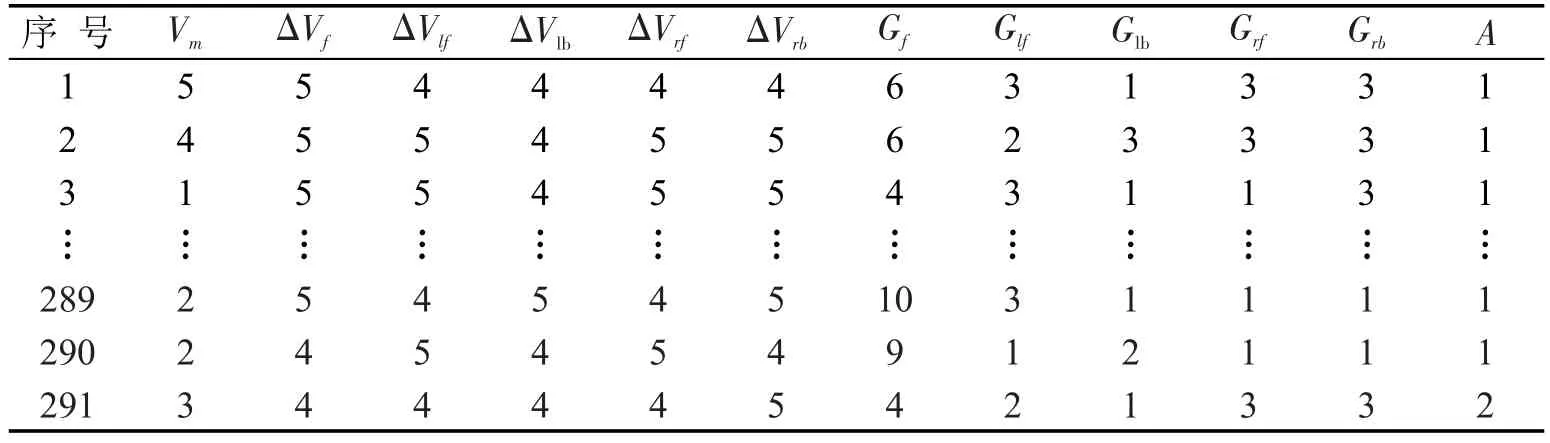
表2 部分测试数据Table 2Part of test-data
4.2 贝叶斯网络结构学习
训练数据共有680组,其中329组换道数据和351组不换道事件数据.利用训练数据,采用构建贝叶斯网络结构的第一种方法,进行网络的结构学习,其基本思想是:以样本数据为基础,利用专家知识确定节点全序,应用K2算法[16]和Matlab的BNT工具箱进行贝叶斯网络结构学习,学习结果(结构1)如图2(a)所示.朴素贝叶斯网络的结构(结构2)示意图如图2(b)所示.

图2 贝叶斯网络示意图Fig.2 Schematic diagram of Bayesian network
4.3 贝叶斯网络参数学习
利用贝叶斯参数学习的方法和Matlab中的BNT工具箱对贝叶斯网络进行参数学习,各节点的先验分布取作Dirichlet分布,即分别计算两种网络结构的各个节点的似然度和先验概率,两种网络结构部分节点的似然度计算结果分别如表3和表4所示.

表3 节点A对节点Gf的似然度(结构1)Table 3Likelihood ofAtoGf(Structure 1)

表4 节点A对节点Vm的似然度(结构2)Table 4Likelihood ofAtoVm(Structure 2)
4.4 模型建立
本文将换道行为A的“不发生”和“发生”分别用“1”和“2”表示.记Y为换道行为的特征属性向量,其分类类别为A,训练数据集{Y,A}的样本容量为M,基于贝叶斯网络建立车辆换道模型的步骤如下[15]:
步骤1学习训练数据集的车辆换道知识.
定义指示函数

则按式(3),计算在换道行为发生或不发生的条件下特征属性值yk的概率分别为

根据式(2),车辆换道行为发生的概率为

步骤2计算在给定条件下换道行为发生的后验概率.按式(1)计算对新给定的一组测试数据Y={y1,y2,...,ym},在换道特征属性Y下换道行为发生的后验概率为

基于特征属性之间彼此相互独立的朴素假设,根据式(3),计算特征属性向量Y的概率为

同理,换道行为发生的似然度为

将式(13)、(15)和(16)代入式(14),计算在Y下换道行为发生的后验概率为P(A=2|Y)
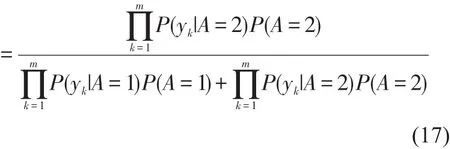
步骤3判断在给定条件下车辆换道行为是否发生.若在Y下换道行为发生的后验概率大于换道行为不发生的后验概率,则判定车辆换道行为发生.换道行为判断的概念模型为

根据前面所得到的两种贝叶斯网络结构,经过上述三个步骤,就建立了基于贝叶斯网络的车辆换道模型,此模型示意图如图3所示.

图3 基于贝叶斯网络的车辆换道模型示意图Fig.3 Schematic diagram of lane change model based on Bayesian networks
5 模型验证
测试数据共有291组,其中141组换道数据和150组不换道数据.利用训练好的模型对测试数据中车辆的换道事件进行识别.将模型识别结果与实际换道事件进行对比,进而得出模型的识别率,模型的识别率反映了模型的精度,如表5所示.

表5 基于贝叶斯网络的车辆换道模型验证结果Table 5The evaluation results of the lane change model based on Bayesian networks
如表5模型验证结果所示,与基于结构1(学习数据所得结构)的车辆换道模型相比,基于结构2(朴素贝叶斯网络结构)的车辆换道模型对训练数据和测试数据中换道行为的识别率分别提高了6.4%、25.4%,达到了91.8%和88.7%,表明该模型用于在高速公路上的车辆换道行为时可以获得较高的精度.
6 研究结论
本文首先对影响车辆换道行为的因素进行分析,建立基于贝叶斯网络的车辆换道模型,并利用分段离散化后的NGSIM车辆轨迹数据对此模型进行训练与测试.此模型主要针对车辆换道行为的预测,测试结果显示:对于换道行为的识别率,基于朴素贝叶斯网络(结构2)的车辆换道模型比基于结构1所建立的换道模型提高了25.4%,达到了88.7%.表明将本文所提出的基于贝叶斯网络的车辆换道模型用于识别车辆的换道行为是可行的,并且获得了较好的效果.将来,在微观交通仿真和驾驶员辅助系统开发的领域,换道模型的研究是非常重要的一部分,换道预警系统是驾驶员辅助系统的重要组成部分,车辆在高速公路上进行换道时,此系统能为驾驶员提供指示信息,辅助驾驶员做出换道决策,提高了车辆和驾驶员的安全性.在今后的研究中,将会考虑把影响驾驶员的因素加入到此模型中,并利用其他的数据集对其进行验证,还会利用其他模式识别的方法建立换道模型,来对模型的精度做进一步的提高.
[1]龙小强,谭云龙.微观仿真自主性车道变换模型[J].公路交通科技,2012,29(11):115-119.[LONG X Q, TAN Y L.Discretionary lane changing model in microscopic simulation[J].Journal of Highway and Transportation Research and Development.2012,29 (11):115-119.]
[2]Ahmed KI.Modeling drivers’acceleration and lane changingbehavior[D].MassachusettsInstituteof Technology,1999.
[3]Zhang Y,Owen L E,Clark J E.A Multi-regime approachformicroscopictrafficsimulation[C]. Transportation Research Board 77th Annual Meeting. Washington,D.C:Transportation Research Board, 1998:103-115.
[4]WeiH,LeeJ.Observation-basedlane-vehicleassignment hierarchy for microscopic simulation on an urbanstreetnetwork[C].TransportationResearch Board 79th Annual Meeting.Washington,D.C: Transportation Research Board,2000:96-103.
[5]Tomer T.Integrateddrivingbehaviormodeling[D]. Cambridge,MA:Massachusetts Institute of Technology, 2003:18-43.
[6]徐英俊.城市微观交通仿真车道变换模型研究[D].吉林大学,2005.[XU Y J.Study on lane-changing model inurbanmicroscopictrafficsimulation[D].Jilin University,2005.]
[7]Yang Q,Koutsopoulos H N.A microscopic traffic simulator for evaluation of dynamic traffic management systems[J].Transportation Research Part C:Emerging Technologies,1996,4(3):113-129.
[8]智永锋,张骏,史忠科.高速公路加速车道长度设计与车辆汇入模型研究[J].中国公路学报,2009,22(2): 93-97.[ZHI Y F,ZHANG J,SHI Z K.Research on design of expressway acceleration lane length and merging model of vehicle[J].China Journal of Highway and Transport,2009,22(2):93-97.]
[9]王荣本,游峰,崔高健,等.车辆安全换道分析[J].吉林大学学报:工学版.2005.35(2):179-182.[WANG R B,YOU F,CUI G J,et al.Analysis on lane-changing safetyofvehicle[J].JournalofJilinUniversity: Engineering and Technology Edition,2005,35(2):179-182.]
[10]Hidas P.Modeling vehicle interactions in microscopic simulation of merging and weaving and weavin[J]. TransportationResearchPartC:Emerging Technologies,2005,13(1):37-62.
[11]Toledo T,Koutsopoulos H N,Ben-Akiva M.Integrated driving behavior modeling[J].Transportation Research Part C:Emerging Technologies,2007,15(2):96-112.
[12]Kita H.Effects of merging lane length on the merging behavior at expressway on-ramps[J].Transportation and Traffic Theory,1993.
[13]Meng Q,Weng J.Cellular automata model for work zone traffic[J].Transportation Research Record:Journal of the Transportation Research Board,2010,2188(1):131-139.
[14]Kita H.A merging-giveway interaction model of cars in amergingsection:agametheoreticanalysis[J]. Transportation Research Part A:Policy and Practice, 1999,33(3):305-312.
[15]张轮,杨文臣,刘拓,等.基于朴素贝叶斯分类的高速公路交通事件检测[J].同济大学学报:自然科学版, 2014,42(4):558-563.[ZHANG L,YANG W C,LIU T et al.A naive bayesian classifier-based algorithm for freeway traffic incident detection[J].2014,42(4):558-563.]
[16]张秀方,唐兴佳.贝叶斯网络应用中的结构学习方法研究[J].电子科技,2014,27(4):179-182.[ZHANG X F,TANG X J.Structure learning methods in bayesian networkapplication[J].ElectranicScienceand Technology 2014,27(4):179-182.]
A Lane Change Model Based on Bayesian Networks
QIU Xiao-ping1,2,3,LIU Ya-long1,MALi-na1,YANG Da1,2
(1.School of Transportation and Logistics,Southwest Jiaotong University,Chengdu 610031,China; 2.Comprehensive Intelligent Transportation National and Local Joint Engineering Laboratory,Chengdu 610031,China; 3.Comprehensive Transportation Key Laboratory of Sichuan Province,Chengdu 610031,China)
Lane change behavior is one of the most foundational driving behaviors in microscopic traffic flow.Researching the lane change behavior contributes to improving the simulation accuracy of lane change models and reducing traffic accidents caused by improper lane change behavior.The current lane change model is the decision model mostly based on the way of driver's thinking.The shortcoming of current models is difficult to catch certain potential decision-making model and influencing factors in the driver's decisionmaking process.In view of this,this paper introduces a typical artificial intelligence method,Bayesian networks,to establish a new lane change model,and tries to improve the accuracy of the lane change model by machine learning.It uses a segmented discrete method to preprocess vehicle trajectory measurement data, and uses the processed data to training and verification this model.The verification results show that,this model's recognition rate to lane change behavior can reach more than 88%.In addition,this model can be further applied to the development of a driver assistance system.
highway transportation;Bayesian networks;machine learning;lane change;characteristic discretization
1009-6744(2015)05-0067-07
U491.2
A
2015-02-10
2015-06-18录用日期:2015-06-25
国家自然科学基金(51278429,51408509);四川省科技厅项目(2013GZX0167,2014ZR0091);中央高校基本业务经费(SWJTU11CX080);成都市科技局项目(2014-RK00-00056-ZF,2014-RK00-00072-ZF).
邱小平(1976-),男,四川南充人,教授,博士.*
yangd8@gmail.com
猜你喜欢
工程数学学报(2020年3期)2020-07-06
长治学院学报(2019年2期)2019-07-24
科学与财富(2018年30期)2018-12-28
雷达学报(2017年6期)2017-03-26
计算机应用(2016年9期)2016-11-01
体育科技(2016年2期)2016-02-28
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
管理现代化(2016年3期)2016-02-06
管理现代化(2016年3期)2016-02-06
智能系统学报(2015年4期)2015-12-27