
电动式自洁拖地机设计
2015-08-07 13:39张野李彬
大众科技 2015年1期
张 野 李 彬
(天津职业技术师范大学机械工程学院,天津 300222)
电动式自洁拖地机设计
张 野 李 彬
(天津职业技术师范大学机械工程学院,天津 300222)
为了降低清洁工人劳动强度,设计了一台电动式自洁拖地机。电动式自洁拖地机将除尘、拖地、自动洗涤拖布等功能经合理布局设计在一起,高效率、高质量的完成地面的清洁工作,有效的节约人力、物力。通过控制车体内部压辊间距可调节皮带拖布湿度,以满足不同情况下地面清洁湿度要求,进而更加高质量的完成清洁工作。车轮采用星轮行星轮转换模式,使拖地机既能平地行走,又能爬楼梯,拓展了应用范围。
拖地机;自洁;电动式
目前,在对办公场所以及商用场所室内进行清扫工作时一般还是以使用吸尘器为主,在对一般的室内进行清洁工作时仍使用扫帚和拖把这类传统工具为主[1-3]。如遇到需要清洁工作的面积过大,若只使用扫帚和拖把这类传统工具来进行清洁工作,清洁人员的劳动强度会非常大,且清洁工作效率非常低。现在市场上存在的电动式拖地机,大多数是在前后各放一个墩布,拖地的墩布变脏后还需人工清洗,工作效率有待进一步的提高。
本着节能、环保、高效、实用、经济的原则,本文设计集各种功能为一体、环保实用、高效节能的清洁设备。该清扫装置中,墩布通过导布轮循环工作,并在车体内有分隔式清洗槽,使墩布在车体内分别经过粗洗、精洗几个工序,具有自动清洗功能,最后通过扎水轮将墩布拧干拖地从而减轻人们的劳动强度。并且,本设计具有爬楼梯功能,更适合在多层建筑物中使用。
1 设计方案
该设计由拖地模块、自洁模块、清扫模块、爬楼模块、驱动模块和换向模块等组成。如图1所示,1——前行星轮,2——电机①,3——电机②,4——皮带①,5——导布轮①,6——清洗轮,7——活动水箱,8——扎水轮,9——导布轮②,10——电瓶组,11——电机③,12——手扶把,13——皮带②,14——脚踏板,15——四杆机构,16——万向轮,17——滚筒,18——后行星轮,19——垃圾收纳室, 20——张紧轮,21——拖布,22——导布轮③。
①拖地模块由电机[3]、皮带[4]、导布轮[5]、张紧轮[20]、拖布[21]组成,工作时电机通过皮带的作用带动导布轮旋转,拖布在导布轮的作用下进行旋转运动,拖布与地面的接触距离由张紧轮调节,从而实现拖地的功能。
②自洁模块由清洗轮[6]、活动水箱[7]、扎水轮[8]组成,待拖地拖脏时,拖布在导布轮的带动下进入水箱清洗,在清洗轮的作用下将脏污清扫,出水箱处有一扎水轮,通过扎水轮可调节拖布湿度,从而完成一系列的拖布自洁过程。
③清扫模块由电机[11]、皮带[13]、滚筒[17]、垃圾收纳室[19]组成,工作时由电机带动滚筒旋转,再由滚筒上的毛刷槽将垃圾带入垃圾收纳室中,实现了清扫垃圾功能。
④爬楼模块由前行星轮[1]、电机[2]、电机[11]、皮带[13]、后行星轮[18]组成。通过电机驱动行星轮运动,当车轮碰到较高的障碍物时就会停止不动,该轮系中的某一个自由度会受到限制,轮系就会转变为行星轮系,然后将带动其余的轮子作回转运动,从而越过障碍,实现了爬楼的功能。
⑤驱动模块由前行星轮[1]、电机[2]、电机[11]、皮带[13]、后行星轮[18]组成,不爬楼时不驱动前行星轮,由后行星轮驱动运行,在爬楼时前后行星轮都驱动,来增加驱动力,实现爬楼的功能。
⑥换向模块由14脚踏板、15四杆机构、16万向轮组成。当清洁车需要转向的时候,用脚踏下踏板使四杆机构摆动一个角度,将万向轮降下来代替后面的行星轮,从而实现清洁车转向的功能。

图1 设计方案
2 传动机构设计
在本设计中共用到了两种传动:带传动(挠性传动)和齿轮传动(刚性传动)[4]。拖布旋转运动通过V型带传动,后行星轮及滚筒也是由V型带来转动的,前行星轮是由一对锥齿轮来传递动力。
带传动是利用中间挠性带,靠摩擦力在主、从动轮轴间传递旋转运动和动力。传动时可以缓和冲击和振动。带传动中心距较大,可以通过打滑,提高设备的防过载的能力。带轮的工作表面应光滑,以减少带的摩擦;各槽的尺寸和角度应保持一定的精度,以使载荷分布较为均匀。
V带带轮的结构设计时带轮应满足以下条件:应使带轮具有足够的强度,重量轻,结构工艺性好,便于制造,无过大铸造内应力;当带轮的圆周速度v>5m/s时,应进行静平衡,当v≥25m/s时则应进行动平衡。
在本设计中,前行星轮驱动使用两组直齿圆锥齿轮,由于直齿圆锥齿轮的轮齿剖面从大端到小端逐渐缩小,齿轮大端的模数、刚度均大,小端的则小,所以载荷沿齿宽分布是不均匀的。为了简化计算,一般假定载荷是集中作用在节锥线上齿宽的中点上,近似认为锥齿轮的强度与一个当量齿轮的强度相当,然后用直齿轮的强度理论和公式来分析锥齿的转动强度。
设计主动轴上小齿轮传递功率P1=600W,转速n1=320r/m,并作悬臂布置。传动比i=u=2,电动机驱动,单向运转。考虑到直齿锥齿的加工多采用刨削,故宜选用软齿面。小齿轮选用40Cr,调质处理,平均硬度280HB,大齿轮选用35CrMo,调质处理,平均硬度240HB。
3 驱动方案设计
本设计驱动方式是由蓄电池供电,采用直流电机。它具有以下几个优点:技术成熟、控制简单、具有优良的控制等诸多特性。在早期的清洁车上也多采用直流电动机,尽管直流电机具有成本低,控制系统简单等优点,但也存在不足之处如长时间运行,散热困难限制了电机的速度和过载能力的进一步提升,降低了电机的转矩质量[5]。
蓄电池是储蓄电能的一种装置。它的作用包括蓄电池能接受充电,能将电能存储起来,还包括向电机提供电能,并由电机将电能转变为机械能。综上所述,本拖地机选择36V120AH的USP电池。
根据设计要求:电机的功率P=600W,拖地机行进的速度为0.1~0.5m/s,根据规定电动机用电流36V直流,选用由宁波市北仑恒峰电机制造有限公司制造的直流电机。

图2 低盘结构图
4 滚筒轴设计
在传轴上装一滚筒,通过在滚筒上间距安装滚刷轴,通过电机带动轴转动,然后使其跟着轴一起转动,下面我们就对轴进行计算与验算。
本设计的清洁滚筒载荷不是很大。轴段根据所受到的扭矩来进行初步的计算,通过扭转强度计算,初步确定轴的最小轴径dmin=20mm[6]。
为便于装配,采用阶梯轴,轴的直径从轴的两端向中间逐渐增大,这样就可以从轴的左端依次安装齿轮、套筒、左端轴承、轴承盖和带轮;另一滚动轴承则从轴的右端安装。零件安装在轴上面,要保证其在轴上的准确位置。为保证清洁滚筒的结构紧凑,可以依据零件的宽度以及各零件之间的距离来确定轴上的各段长度。对于不允许有轴向移动的零件,零件受力后要保证不会改变其位置,即在轴上的定位要准确固定并可靠。为保证零件在轴上的定位可靠,一般取与轮毂配合的长度一般比轮毂长度要短2~3mm。清洁滚筒轴结构图如图3所示。按设计要求,滚筒轴上所要支撑的零件主要有带轮、行星轮、滚刷筒、滚动轴承。

图3 清洁滚筒轴结构
5 自洁机构设计
自洁功能是本设计中的一大创新点,设计的拖地机将拖地、清洗、拧干这三道工序全部有机结合在一起。
拖地的主体是拖布,通过拖布作旋转运动来清洁地面,旋转运动由导布轮带动,拖地时为了实现拖布与地面的接触程度可以通过张紧轮调节压力,如图4所示。
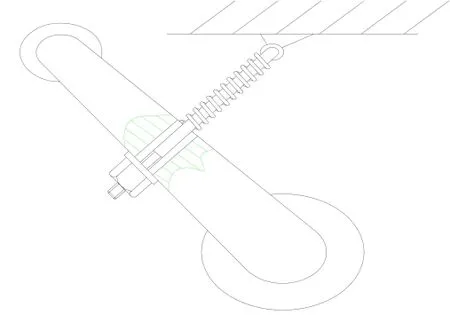
图4 张紧轮
通过拧动调节螺母来调节弹簧的松紧状态,从而实现拖布与地面接触的状态。
拖布在导布轮的作用下,进入活动水箱前要经过一个清洁滚轮,通过清洁滚轮将拖布上的脏物刷下来,然后进入活动水箱中,从而完成了自洁的这一过程。
拖布在导布轮的作用下,出活动水箱时要经过一个扎水滚轮,扎水滚轮的作用是调节拖布的干湿程度,对于不同的环境里通过调节扎水滚轮的间隙,实现拖布的干湿程度。
6 爬楼机构设计
爬楼模块是由两组行星轮组成,每个行星轮都由前行星架、后行星架、太阳轮、行星轮组成。为使拖地机适应在平地与爬楼两种情况下工作,前后行星轮都由各自的电机驱动,在平地时,拖地机的后行星轮为主驱动轮,前行星轮的电机不工作;爬楼时由于需要更大的功率,前后行星轮一起工作,实现爬楼的功能,并在爬楼的过程中由于水箱设计成活动式的在重力的作用下,水箱中的水面一直保持水平的状态,在爬楼的过程中水箱里的水不会洒出来。
行星轮可以兼顾平地行走与爬楼的功能,并且具有体积小巧,结构紧凑,效率高以及操作简单等特点,是一种比较理想的爬楼方案。图5为行星轮结构图。
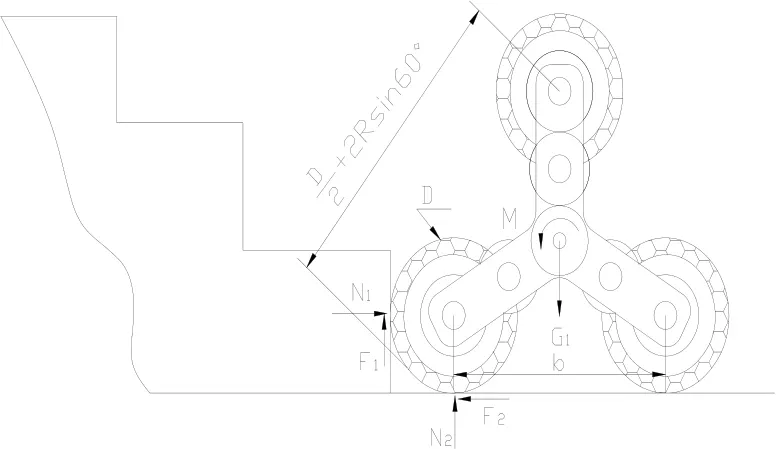
图5 行星轮结构图
7 转向机构设计
在设计中由于爬楼的功能,使得前后的行星轮都是由直轴连接而成,造成了拖地机的换向困难,设计以下方案来避免换向难的问题:由铰链四杆机构设计而成,当拖地机清洁地面时,万向轮是升起来的,当拖地机需要转向时,通过脚踏板的作用将万向轮降下来使后面的行星轮离开地面,从而来实现转向的功能,结构如图6所示。操作过程如图7所示。

图6 四杆机构结构图

图7 操作过程简图
8 滚筒设计
在滚筒圆周上间隔的均分毛刷,当电机带动滚筒转动时这些毛刷将交替的进行清扫,通过毛刷将垃圾带入到垃圾箱中,保证清扫质量。毛刷的基底为梯形长条,装在圆筒的梯形槽内,保证不会在工作中出现松动现象,这样的安装也给毛刷的更换带来很大的方便,如图8所示。

图8 滚筒工作简图
9 结论
为了更好的减轻人们日常清扫工作,提高工作效率,本设计集拖地、清洗、拧干三道工序于一体。驱动方式采用电动方式,在传动系统中通过电机带动带轮来实现动力的传递。自洁功能由内部活动水箱以及导布轮来完成。爬楼功能由两组行星轮来实现,转向装置是由结构简单、操作方便的四杆机构来实现。本设计制造成本底,工作效率高,具有一定的市场推广价值。
[12] 白海侠,周海哲.涤痰祛瘀法治疗缺血性中风的机理探讨[J].辽宁中医杂志,2009,36(10):1709-1710.
[13] 林信富,潘晓鸣,朱亨炤,等.中风病痰瘀证与FIB、D-聚体的关系研究[J].江西中医学院学报,2011,23(6):33-34.
[14] 范小宇,刘康.浅析痰在中风发病中的意义[J].光明中医,2011,26(3):561-562.
[15] 刘淑芳.浅谈痰湿型中风的证治[J].中医杂志,2006, 47(8):637.
[16] 冯俊平.治痰法在中风病中的应用[J].中国中医药信息杂志,2007,14(6):87-88.
[17] 肖德益.健脾化痰法治疗风痰阻络型中风30例[J].中国中医药现代远程教育,2010,8(3):29.
[18] 张佛明,张新春,黄燕.痰瘀同治法治疗缺血性中风Meta分析[J].南京中医药大学学报,2007,23(6):358.
[19] 吕光华,薛青理.豁痰开窍通络法治疗脑梗死38例临床研究[J].中国社区医生·医学专业,2011,13(10):221-222.
[20] 马永琦,淡增刚.益气豁痰化瘀法治疗急性脑梗死48例[J].陕西中医,2011,32(6):679-681.
Design of electric self-cleaning floor mopping machine
In order to reduce the labor intensity of workers cleaning the ground, one can climb stairs self-cleaning mopping machine was designed. Self-cleaning mopping machine, mopping the floor, washing mop dry ground, and automatic functions design together, high efficiency and high quality completion of the ground mopping work, effectively save manpower and material resources. By controlling the body internal pressure roller spacing adjustable belt mop humidity, to meet the requirements of different situations and ground cleaning humidity, more high quality finished mopping. By using the star wheel planet wheel conversion mode, the floor mopping machine not only can walking, and can climb stairs, expanding the scope of application.
Floor mopping machine; self-cleaning; electric
TP242
A
1008-1151(2015)01-0079-03
2014-12-12
2013年地方高校国家级大学生创新创业训练计划项目(201310066023)。
张野,供职于天津职业技术师范大学机械工程学院。
猜你喜欢
数学小灵通(1-2年级)(2022年3期)2022-03-17
学苑创造·A版(2022年2期)2022-01-29
大众摄影(2018年7期)2018-07-05
机械设计与制造(2018年2期)2018-03-05
青岛画报(2018年1期)2018-02-23
方圆(2017年24期)2018-01-17
电子制作(2017年19期)2017-02-02
工业设计(2016年11期)2016-04-16
小雪花·成长指南(2015年10期)2015-10-23
长江大学学报(自科版)(2014年4期)2014-03-20
